基于改进ELM的计量终端定位算法仿真
2022-10-25 11:59黄友朋党三磊
计算机仿真 2022年9期
路 韬,黄友朋,党三磊,张 捷
(广东电网有限责任公司计量中心,广东 广州510000)
1 引言
智能电网的建设对电网资产的管理提出了更高的要求。作为电能计量的重要物资,计量自动化终端具有体积小、数量多、安装位置分散的特点,要对这类数量庞大的计量物资实现精细化管理,如果仅依靠传统的管理方法,其难度巨大。无线通信技术的进展及定位算法精度的提高,为基于SIM卡的计量终端精确定位提供了技术保障。
目前,可用于无线节点定位算法的技术主要有四类:第一类是基于电磁波到达时间的定位TOA(Time Of Arrival)技术;第二类是基于电磁波入射角的定位AOA(Angle Of Arrival)技术;第三类是利用到达时间差进行定位的技术,即TDOA(Time Difference Of Arrival);第四类是基于电磁波信号强度来进行定位RSSI(Received Signal Strength Indicator)的技术,以及上述技术的混合方法如:TOA/AOA、TDOA/AOA 等。上面几类技术,各有优缺点:TOA要求MS与BS之间需要严格的时间同步,而TDOA 不需要。AOA 需要天线阵列测量信号到达角角度,增加定位成本。RSS 需要预先知道信号传输模型才能准确定位,容易受到环境影响,但由于其实施简单,适用性强,因此被广泛用于不同场景的物体定位中:文献[4]研究地震灾害发生时,利用被埋人员随身携带的Wi-Fi设备发出的信号进行定位,提出了一种无需已知压埋环境的压埋Wi-Fi设备的快速定位算法,较好地克服了信号在压埋物下大幅、不可知损耗与在外部复杂环境中多路径传播的问题。文献[5]利用改进灰狼优化算法优化了一种基于测距的无线传感器定位算法,实现了仅利用3个信标节点预知未知节点坐标的目的,取得了较好的预测效果。
深度学习以及智能算法的兴起,又为解决定位问题提供了一种手段。文献[6]针对电力设备的绝缘劣化而引起的局部放电故障,提出了一种基于接收信号强度(RSSI)指纹的局部放电定位方法,该算法将粒子群算法和BP神经网络进行融合,完成了局部放电点的精确定位。文献[7]针对DV-Hop算法中存在的定位精度不足的问题,通过引入人工蜂群算法和粒子群算法并将蜂群算法的求解范围进行缩小,实现了算法的快速收敛,提升了算法的准确性。文献[8-9]通过利用ELM 神经网络匹配预先已建立的指纹数据库方法,完成了特定目标的定位。但是这种方法由于没有考虑信号受噪声的干扰的影响,导致指纹与位置坐标不能唯一对应的问题。为了降低噪声的影响,文献[10]采用对同一位置进行多次测量的方法,消除了噪声对定位结果的干扰,提升了定位精度。但该方法由于用到大量训练样本,从而导致网络训练时间变慢的问题。文献[11] 针对多次测量引起的训练耗时过长的问题,提出了一种改进的核极限学习机无线定位算法。通过在同一位置的多次测量获取样本子空间特征,利用样本的特征值代替训练集,大大减少了训练时间,并运用矩阵近似及扩展的相关理论改进核极限学习机算法,取得了较好的应用效果。
受文献[11]方法启发,文章提出一种联合主分量分析和ELM极限状态机的计量终端定位算法,算法首先对于计量终端安装位置处的RSSI信息进行多次测量,测量后的信号首先经过卡尔曼滤波器进行滤波操作,以滤除接收信号中的噪声干扰,然后构造自相关矩阵,利用主分量分析算法对接收信号进行特征提取,最后选取关键特征值及其对应的特征向量构建神经网络的训练数据集。训练过程中,为了强化主要特征向量的作用,在训练数据集合的设计中,根据特征值的大小控制训练集中特征数据出现的频率,确保训练后的神经网络能大幅提高。
2 RSSI测距模型
RSSI的测距技术在工程实践中十分高效,该方法通过收集信号强度的大小便计算出终端与基站的物理距离。然而,RSSI容易受到噪音、环境干扰影响,使得收到的信号强度有较大的波动。此外,城市环境中建筑物、树木等都会引起传播过程中的多径干扰和非视距传播误差(NLOS(Non-Line Of Sight)误差)。其中,非视距传播误差更是影响定位精度的重要因素。因此,应针对该误差采取相应的算法以减少其对测距结果精度的影响。
在实际应用中,终端周围分布着基站。终端工作时会不断地检测着周围基站的信号强度。通过比较,终端可以确定三个信号强度最大的基站,同时可确定它们的位置信息,便得到了终端周围三个点的信息。应用三点定位算法,就可以完成对终端定位操作。算法的基本模型如图1所示。

图1 基本定位模型
设这三个基站所代表的节点的位置分别为、、,终端所代表的未知节点的位置为。设、、的距离分别为、、。设、、、四点的坐标分别为 (,)、(,)、(,)、(,)。
终端与基站之间的距离可以利用式(1)计算

(1)
式中,()、()分别为在与基站的距离为、时终端接收到的信号强度;为路径损耗因子;为基站和终端之间的距离;为参考点到基站的距离;为背景噪声,且∈(0,)。
计量终端上的通信模块利用电力无线专网与周围基站自动连接,自动获取到关于基站的LAC(Location Area Code 位置区域码)和CID(Cell Identity 基站编号)。基于LAC和CID,可以确切地得知基站的坐标,即A、B、C三点的坐标已知。
利用直线AD、BD,式(2)可求出D点的坐标,但所求出的结果有两个且关于直线AB对称。因此,为了确定D点的坐标,引入直线CD。利用式(3),可以对由式(2)求出的的两个结果加以检验,得到满足式(3)的唯一结果,即D点的坐标,也就是终端的位置坐标式(4)。

(2)

(3)

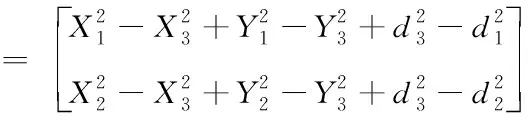
(4)
由于计量终端安装于城市中,信号传输的路径不会是理想传播的环境,存在建筑物、树木等障碍物遮挡,这些遮挡物体将会造成NLOS误差。误差的存在将导致定位的不准确,需要在实际的应用中,根据不同环境减少这种误差,以期得到精度更高的终端位置信息。
3 ELM算法
为了消除NLOS误差对定位精度的影响,常用的方法是通过估计、滤波算法对误差信号进行滤除或估计,在最后的定位结果中将误差部分剔除,以达到估计准确性的目的。但是这些算法存在大量的求导运算以及多元方程的求解,复杂度较高。BP神经网络的出现为定位的问题提供了一条新的解决途径。BP神经网络首先用一些训练数据进行网络权值的训练,最后基于误差最小的准则进行反向权值的校正,直至误差达到允许的范围,训练好的权值网络被用于实际数据的处理。然而,BP神经网络在实际的使用中始终存在一系列不可回避的问题,例如参数调整繁琐、易陷入局部最小而导致无法达到全局最小、网络学习时间长和泛化性能差等。为此针对这类问题,南洋理工大学的黄广斌教授在2004年提出了ELM神经网络用于求解单隐层神经网络的算法。ELM神经网络结构如图2所示:图2所示的网络结构,输入层神经元总共有n个、隐含层神经元有K个和输出层神经元有m个。
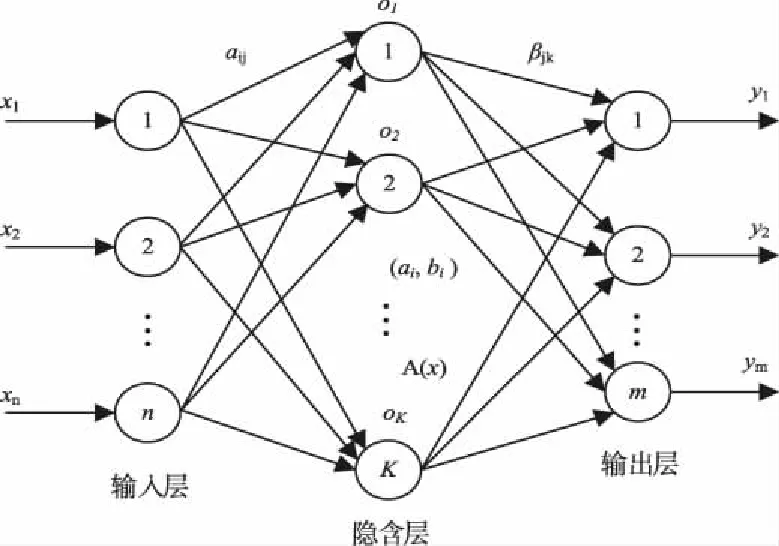
图2 ELM网络结构图
最左侧为网络的输入层,包含个独立的输入,即=[,,…,];中间部分为网络的隐含层,包括个隐层节点,的值反映整个网络的性能,值越大性能就越强,其中为第个输入层与第个隐层节点的连接权值,=1,2,…,,为隐含层节点的偏差,()为网络的激活函数,为隐含层与输出层的连接权值;最右侧为网络的输出层,包括个对应的输出。
ELM神经网络是SLFN中一种非常优异的学习算法,相较于常见的SLFN,其在整个网络求解过程中不需要对隐含层参数进行调整,输入层与隐含层间的连接权值(即输入权值)和隐含层神经元阈值(隐含层偏差)都是随机生成且始终保持不变,仅需通过设定隐含层神经元数,便能求解出唯一存在且最优的解。相比传统的神经网络ELM算法需调参数少、网络结构简单、耗时短且具有优异的泛化性能,并且不再通过传统的迭代求解算法进行网络的训练,而是利用矩阵广义逆的思想进行网络参数的求解,极大地减少了运算时长和内存消耗。
ELM神经网络相较于常规的迭代算法,其输入权值及隐层偏差无需人为考虑,仅需要设定相应的隐层神经元数,便能进行整个求解过程且具有很快的运算速度。
ELM算法网络训练步骤如下:
1)假设有N个任意的训练样本(X,t),其中
=[1,…,]∈,
=[1,…,]∈
(5)
将网络的隐含层节点数设为K,激活函数设为A(x),则有

(6)
=[1,2,…,],=[1,2,…,]
(7)
其中,、和分别为第个隐含层节点的输入、输出权重和单元偏差,·表示与的内积。在整个网络训练中仅需唯一设定值便能求出最优解且解唯一。
2)当与相等时,输出误差最小,即

(8)
则存在、和,

(9)
上式对应的矩阵形式为
=
式中,,和分别表示隐含层节点的输出矩阵、权重矩阵和期望输出。
3)计算隐含层单元输出矩阵
=(,…,,,…,,,…,)

(10)
=[,,…,]×,=[,,…,]×
(11)
随机设定输入权重和隐含层单元偏差后,输出矩阵即为一固定不变的矩阵。此时,网络训练即为求解输出权重矩阵的最小二乘范数解,即

(12)
=
(13)
式中,表示矩阵的Moore-Penrose广义逆,通常采用奇异值分解法进行求解,整个ELM训练就是一个求解隐含层输出矩阵H的过程,算法大致步骤如图3所示。
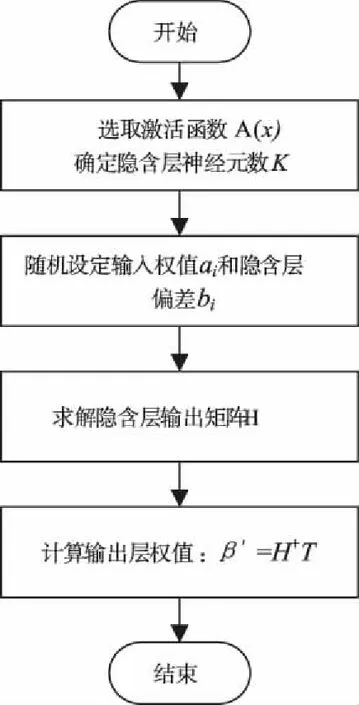
图3 ELM算法步骤
4 主分量分析法
在实际使用中,计量终端将会接收到来自周边多个基站的发射信号,这些发射信号经过不同的路径到达计量终端,对于计量终端而言,同一时刻可以获得来自多个基站发送的数据,这些数据将作为神经网络的输入数据,用于网络参数的训练和判断。在这些数据中,并非全部数据都对神经网络的训练有益,过多的训练数据甚至导致神经网络过拟合,从而导致神经网络的性能下降。
假定在同一时间,计量终端可以接收来自于个基站发射的数据序列{()},其中=1,2,…,=1,2,…,(为观测数据的长度),可以采用在一天的多个时刻进行观测。(1),(2),…()为计量终端不同时刻采集的来自同一基站的发送信号。定义×维的观测数据矩阵为

(14)
式中,()=[(),(),…()]是由所有个基站的发送信号所组成的空间向量,×维观测矩阵的特征值表示为

(15)
式中,为观测矩阵中,特征值对应的特征向量;为观测矩阵的特征值。
为了避免训练数据中无效数据引起的网络训练效率降低,在训练数据的处理中,引入主分量分析法,用以减少无效数据的数量,可以达到训练数据降维的目的。
令(),=1,2,…,=1,2,…表示观测矩阵的共性特征,则由特征值理论可知,原观测数据可以使用这些共性特征的线性组合进行表示,即:

(16)

=
(17)
由于观测矩阵是对称矩阵,其特征值不为负数,故存在12,使
(18)
上式中的和=[1,2,…]分别是观测矩阵的特征值和对应的特征向量。用左乘式(17),则有
==
(19)
=(-1)2
(20)
计算每个接收到的观测信号功率,得到

(21)
将(18)式带入(21)式则有:

(22)
综合以上公式可知,从功率的角度来看,只有与比较大的特征值相对应的特征子波信号在功率中的贡献比较大,只要选择这些特征子波信号便可以足够描述接收到的个基站的空间信号。简言之,若观测矩阵有个主特征值,,…,则只要提取这个特征子波(),()…()即可,观测信号的展开式为

(23)
在神经网络的参数训练中,可以按着上述步骤,找到观测矩阵的特征值最大的几个值,选取这些特征值对应的特征子波()作为神经网络的输入,利用这些数据完成神经网络参数的训练。训练完成的神经网络,被用于从后续接收的RSSI信息中计算出计量终端的位置坐标信息。
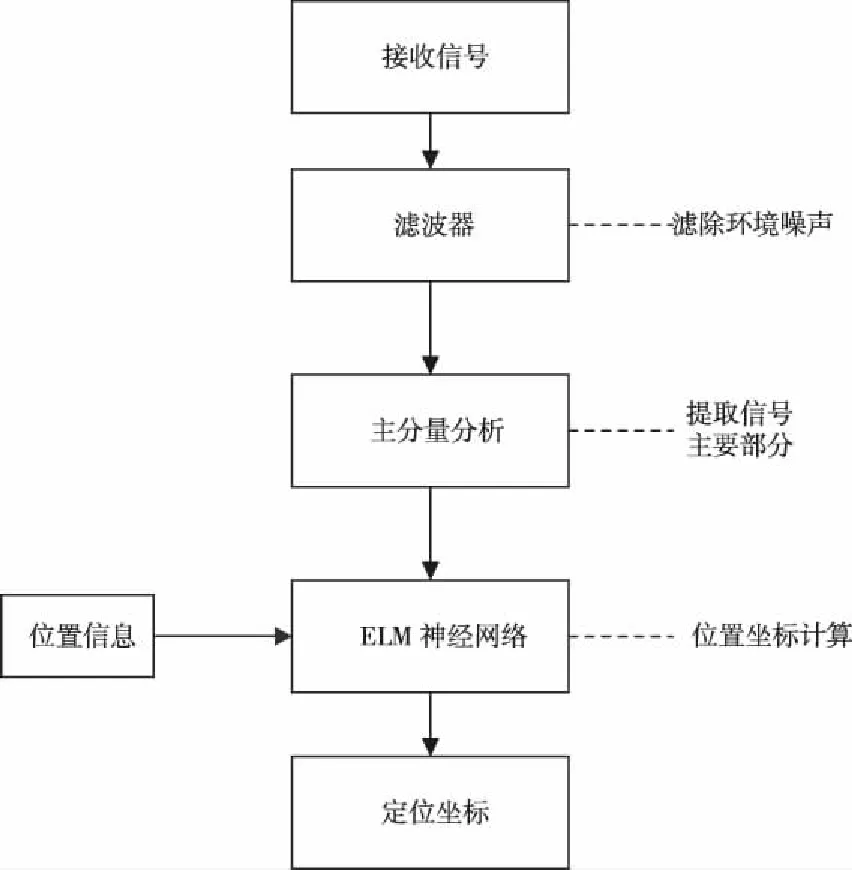
图4 系统工作流程
5 仿真研究
在文章的实验环境搭建中,为了模拟真实的情况,文章搭建了多节点的发射系统,但在主分量分析中,仅选取特征值较大4个节点的特征向量作为训练数据,之所以选择四个节点,主要考虑到在三维空间中对物体的定位需要,为了简化计算,实验将4个节点布置在同一个高度,同时在试验环境中,将每个节点的Z坐标设置为0,这样,所有的节点和目标节点在三维坐标系统中的zoy平面中。
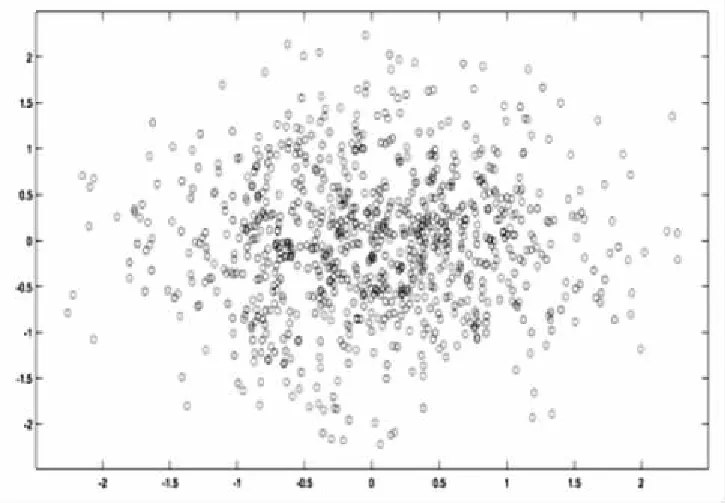
图5 采样点分布图
图5为计量终端周边的接收信号分布情况,从图中可以清楚看出,由于NLOS以及多个基站信号混合的影响,采样数据呈现出随机凌乱的分布,直接将这些数据送至神经网络进行参数训练,很容易造成过拟合的问题,因此在训练神经网络参数之前需要对这些凌乱的数据进行归类处理,以便找出接收信号最强的那部分信号,用于训练神经网络参数。为了得到信号的主要成分,对这些凌乱数据进行主成分分析,分析时选取4个主要基站的发送信号作为主分量,得到的结果如图6所示。
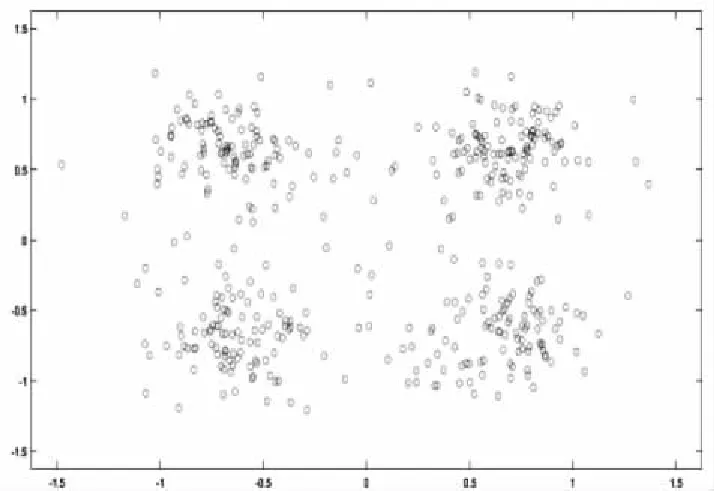
图6 主分量分析后的数据分布图
图6为经过主分量处理后的输入数据,由图中的数据分布可知,原来凌乱的数据分布变得具有规律性,且数据点数量大量减少,数据主要集中在四个基站覆盖范围之内。利用这些数据训练ELM神经网络,将会大大减少神经网络的训练时间,训练出的网络参数精度更高。
为了衡量训练后的ELM性能,文章选用均方根误差(RMSE)作为评价指标,用以评价对测试集的预测值与真实值间的相符程度,其定义如式(24)所示

(24)
文章中的ELM神经网络节点配置的输入层节点设置为4个,输出层为2个,分别对应4个主特征值对应的输入向量以及输出的二维坐标(X,Y)。训练集与测试集个数选择分别为500,250组数据。由于隐含层节点数K决定着网络的性能和模型的拟合效果,若隐含层节点数选取过小,则会降低网络性能;隐藏节点选择过大,则会引起过学习,使得预测结果出现过拟合的现象,为此需要酌情进行选取。图7是不同隐藏节点个数对应的RESE指标。
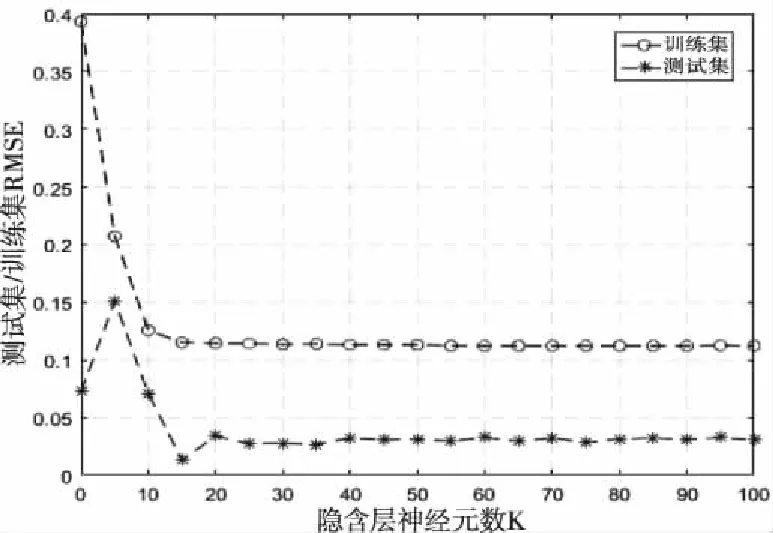
图7 隐含层节点数K与网络性能关系
从图7所示的图形中,可以看出,在K=20前,随着K的增加,网络的拟合性能在不断提高,但当K越过了20后出现了拐点,网络性能开始逐渐趋于稳定,在K为25至60间网络基本处于稳定状态,此时再继续增加K对网络并无实际意义还可能会引起过学习,导致性能反而不足,因此可以选择趋于稳定后一小段时间内的K值作为网络设定值,本文选取K=30作为网络参数。
图8为测试数据分别输入到训练好的不同神经网络得到的输出结果,其中实线部分表示利用原始的数据训练的ELM网络;虚线部分表示经过主分量分析处理后的数据训练得到的改进ELM网络。从图中可以看出,原始数据训练得到的ELM网络,其在网络的初始工作阶段,网络的性能波动较大,但随着处理数据的增加,网络的准确率逐渐趋于稳定,基本达到98.82%;而经过处理后数据训练得到的改进ELM神经网络,在网络的工作初期,其波动性较小,准确率很快达到98.5%左右,随着后续测试数据的处理,其准确率一直能维持在一个稳定的状态。对比两条曲线,可以发现,ELM算法与改进ELM算法,其准确率都能达到一个很高的数值,且ELM算法的准确率更高一些,这得益于原始数据由于样本的差异性更大,使得训练的神经网络泛化性更好,因此准确率有所提高;而改进的ELM算法,由于采用了主分量分析算法,消除了采样数据里存在的干扰,因此,达到稳定的速度更快,鲁棒性更好。
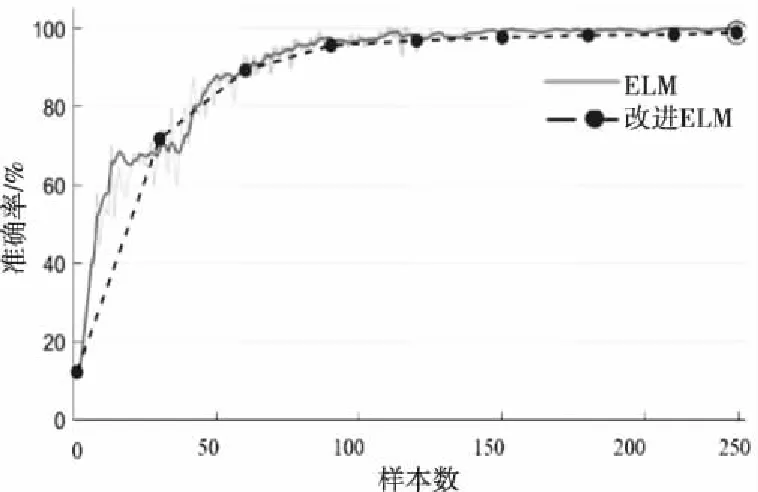
图8 定位精度比较
图9-11为本文所提算法对于待定位点处于不同位置时的定位效果图。图9为待定位点处于四个基站的覆盖范围内时定位结果;图10为带定位点位于四个基站外部的定位结果,从定位结果来看,当带定位点位于四个基站覆盖范围以内时,定位精度最高,基本达到0.2米的范围;而图10所示的情况,定位精度在2米以内;定位最差的情况如图11所示,即部分基站的信号被另外的基站信号干扰,如基站3的信号被基站2的信号干扰,此时的定位精度已经超过2米,这种情况的出现主要由于基站的布局不合理,导致基站发送信号的相互干扰而造成。
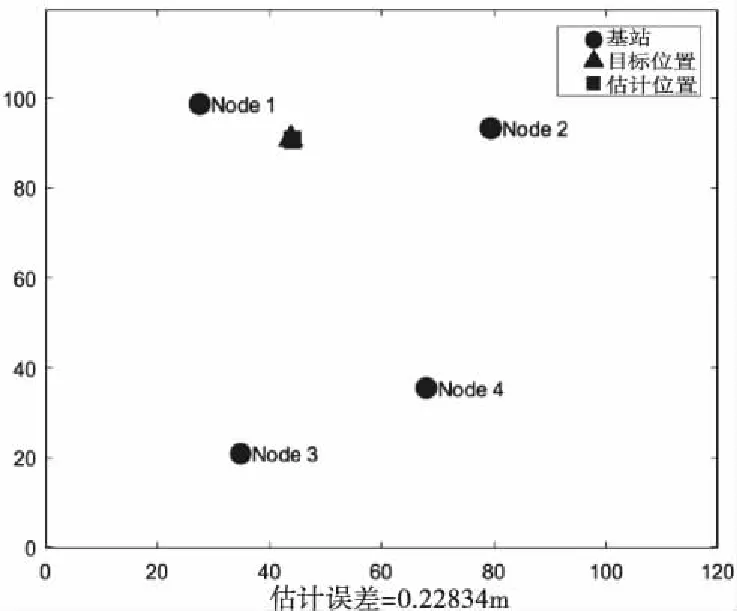
图9 不同位置时定位精度(内)
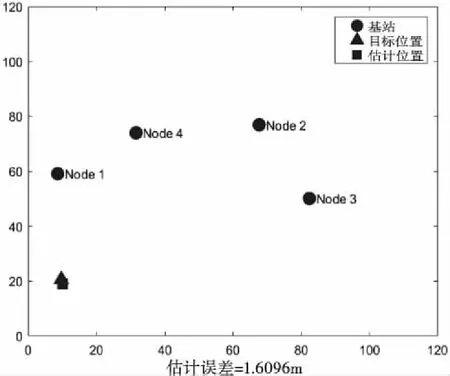
图10 不同位置时定位精度(外)

图11 不同位置时定位精度(内(干扰))
图9-11为本文所提算法对于待定位点处于不同位置时的定位效果图。图9为待定位点处于四个基站的覆盖范围内时定位结果;图10为带定位点位于四个基站外部的定位结果,从定位结果来看,当带定位点位于四个基站覆盖范围以内时,定位精度最高,基本达到0.2米的范围;而图10所示的情况,定位精度在2米以内;定位最差的情况如图11所示,即部分基站的信号被另外的基站信号干扰,如基站3的信号被基站2的信号干扰,此时的定位精度已经超过2米,这种情况的出现主要由于基站的布局不合理,导致基站发送信号的相互干扰而造成。
6 结束语
文章提出一种主分量分析和ELM极限状态机的计量终端定位算法,算法首先对于同一位置的RSSI信息进行多次测量,测量后的信号首先经过滤波器进行滤波操作,以滤除接收信号中的噪声干扰,然后构造自相关矩阵,利用主分量分解算法对接收信号进行特征提取,选取关键特征值以及特征向量作为神经网络的训练数据集。训练过程中,为了强化主要特征向量的作用,在训练数据集合的设计中,根据特征值的大小控制训练集中特征数据出现的频率,确保训练后的神经网络能大幅提高,仿真结果表明,与常用的ELM神经网络算法相比其预测性能比较稳定,基本准确率达到98%左右,而原有的神经网络算法,其预测精度具有波动性,其主要原因是文章提出的算法由于采用了滤波以及信号主分量分析算法,消除了采样数据的随机性,因此,其性能较为稳定可靠,文章最后给出了待定位的计量装置位于不同位置时的定位效果,从定位效果可知,文章提出的算法对处于不同位置的待定位点都能进行定位,定位精度受基站位置的变化而变化。因此,计量装置在安装时,建议对周边的基站信号进行一遍频点扫描以确定最佳的安装位置。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
现代电力(2022年2期)2022-05-23
中国新通信(2022年4期)2022-04-23
北京航空航天大学学报(2021年9期)2021-11-02
北方牧业(2020年9期)2020-12-14
现代装饰(2020年8期)2020-08-24
恋爱婚姻家庭·青春(2019年9期)2019-12-10
恋爱婚姻家庭(2019年26期)2019-09-14
电子制作(2019年24期)2019-02-23
探索科学(2017年4期)2017-05-04