基于超声波测距和激光测距的便携式防撞预警装置
2022-10-27 02:41江苏大学无锡机电学院周付俊
内江科技 2022年9期
◇江苏大学无锡机电学院 周付俊
为了减少盲人等人群交通事故问题,有必要借助便携式预警装置来监测,报警来提示盲人等人群。本文依据超声波测距原理、激光测距原理,利用Arduino、Proteus等软件,开发了基于超声波测距和激光测距的便携式防撞预警装置,该装置能够有效减少此类事故的概率。
安全预警器是一种防止高速行驶中车辆连环追尾碰撞事故发生的全自动报警装置。该装置主要由加速度传感器和无线电收发装置构成。当车辆高速行驶过程中遇到危险情况采取紧急制动或者发生碰撞事故的一瞬间,预警器自动检测到危险信号,并驱动无线电收发装置,以光速向其尾随(周边)1.5公里范围内的其他车辆发出声光报警信号,提醒其他驾驶员高度警惕,尽快采取主动性防范措施,遏制连环追尾碰撞事故发生。
基于类似的需求目的以及我国老龄化的国情,现需要设计一种装置来判断周围一百米内是否有物体在以极快的速度接近或周围三米内是否有障碍,并根据方向提供预警。以此来帮助盲人或者反应迟钝的老年人留有时间做出防范,避免事故发生,减少家庭悲剧的发生。
1 系统总体结构的设计
1.1 系统原理
便携式防撞预警装置原理图如图1所示,系统由超声波传感器,TOF激光测距模块、微处理器、语音预警模块等部分组成。其中超声波传感器的型号为HC-SR04,微处理器用的是Arduino。工作时实时检测周围的环境,来实现检测一百米内是否有物体在以极快的速度接近或周围三米内是否有障碍,再通过播出不同的音频来起到预警的作用。装置要设计合理的结构以及挑选合适的材料达到实用,美观,便携式的效果。

图1 便携式防撞预警装置原理图
1.2 超声波测距原理
只需要提供一个时间长于10 μs的高电平触发信号,该传感器内部会自动发出8个40 kHz的超声波脉冲,同时超声波传感器内部产生一个回响高电平并检测回波。一旦检测到回波信号则向外输出回响信号。回想高电平信号的持续时间就是超声波传感器从发射超声波信号到接收到反射的回波的时间[1]。据此原理可以计算出物体距离超声波传感器的距离S。
其中v为在空气中的声速;t为高电平持续的时间。
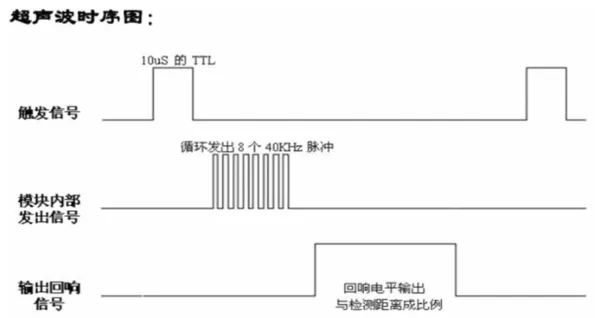
图2 超声波时序图[1]
目前超声波测距技术已经比较成熟,图3为用超声波测距测量实际距离为30cm,50cm,100cm,120cm,140cm,160cm,200cm,300cm所做出的折线图。此图斜率K=超声波测距/实际距离。由图可见,斜率K接近于1,即意味着超声波测距测量的距离基本等于实际距离,准确性较高。
图3
1.3 激光测距模块工作原理
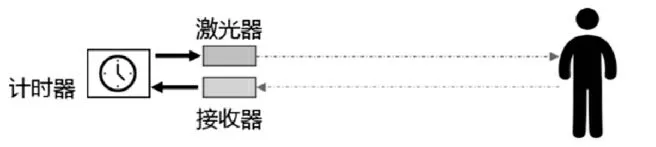
图4 激光测距原理
激光器发射一个激光脉冲,并由计时器记录下出射的时间,回返光经接收器接收,并由计时器记录下回返的时间。两个时间相减即得到了光的“飞行时间”,而光速是一定的,因此在已知速度和时间后很容易就可以计算出距离[2]。在单片机中设置时刻T1和T2,读取两个时刻的距离S1和S2,运用区间测速,即可计算出速度V。

1.4 机械结构
这部分是本装置的一个重点。机械结构的设计,既需要能够实现360°的全方位检测,又需要保证结构简洁小巧,方便携带。机械机构如图5所示,可放置在生活中常见的帽子中。由于常见的布帽材质柔软不具备安置核心装置的硬度,所以制作了相应的支撑结构,即在内部圆柱壁装上支撑固定装置,在圆柱顶部装上支撑底板。
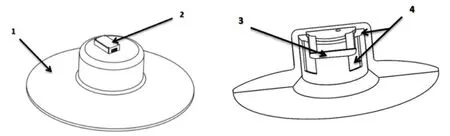
图5 本作品放置在帽子中的示意图及剖面视图
机械结构主体部分由步进电机、角度传感器和支撑、连接框架组成。如图6所示,步进电机和角度传感器两者之间装有相同规格的齿轮,设备靠两个齿轮相互啮合来使角度传感器获取步进电机的旋转角度的数据,从而获得即时的探测方向。步进电机输出轴上同时还装有支撑平台,支撑平台上装有TOF激光测距模块和超声波传感器。支撑平台最上方还留有处理探测数据的单片机的空间。侧面留有空间给电源和控制电机的单片机。总之,这样的结构设计使整个预警器空间利用率高,结构紧凑,方便预警器移植到其他的使用场合。
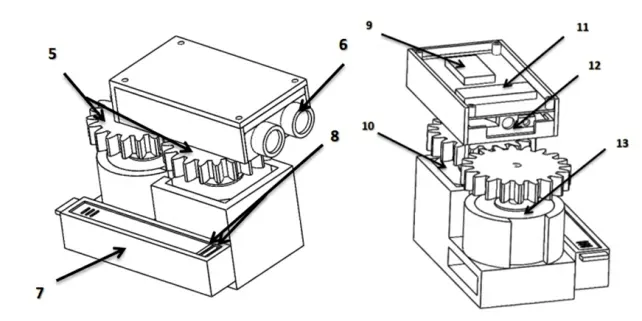
图6 本作品内部结构视图
1.5 测距及预警模块
测距模块:包括超声波传感器和TOF激光测距模块。前者实现周围两三米内障碍物预警,后者实现对百米范围内快速靠近物体预警。激光测距仪所在支撑平台表面并不水平,具有一定的倾斜角度来保证测量对象的高度合适。超声波传感器装在与激光测距仪相对的方向,通过旋转平台,可以实现两者同时360o的扫描。
预警模块:包括单片机和语音播报模块。其中,单片机负责处理测距模块传回的数据信息,分析判断是否有障碍物挡路或者被撞危险。经过数据处理后,得到某个需要预警的情况时,触发语音播报模块进行预警。预警信息中还包括由角度传感器采集的障碍物或高速运动物体的方位。
2 系统工作流程
作品的工作流程可参考图7。工作流程的具体描述如下:打开开关后,预警器即处于工作状态。顶部的超声波传感器和激光测距仪探测两个相对的方向,并处于360°旋转的状态,同时即时反馈探测信息给单片机。单片机经过智能数据处理和分析后,判断是否达到报警条件。若达到报警条件,将通过语音报警且提示障碍物或快速靠近物体的具体方位。
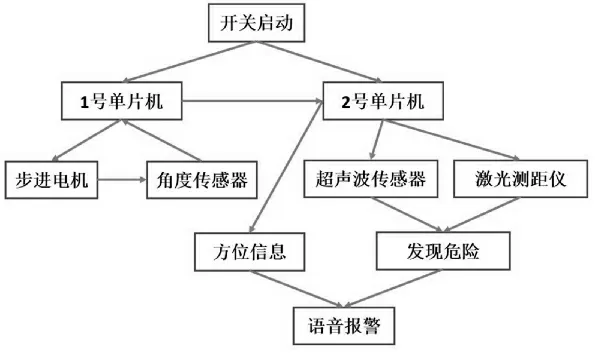
图7 预警器功能流程图
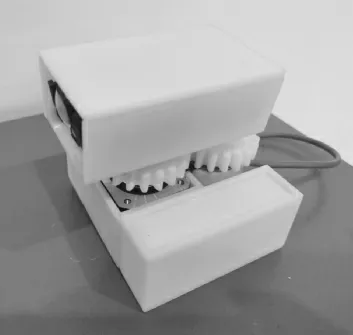
图8 便携式防撞预警装置实物图
3 实际应用和特色
区别于市场上一般的针对老年人的蜂鸣预警器,本装置能够贴心的提供语音预警,且提示障碍物或快速运动物体的具体方位。结合激光测距仪、超声波传感器和旋转平台,实现了百米范围内快速靠近物体预警和两三米内障碍物预警。装置在保证实时预警功能同时,还合理设计机械结构,实现小巧便携的特点,方便移植至其他可能的相关应用场景。本装置具有成本低、测量方位广、结构设计小巧便携等特点,具有良好的市场应用前景。
4 结束语
本文章依据超声波测距原理、激光测距原理,利用Arduino、Proteus等软件,开发了基于超声波测距和激光测距的便携式防撞预警装置,该装置能够有效减少事故的概率。
猜你喜欢
导航定位学报(2022年4期)2022-08-15
航天返回与遥感(2021年6期)2022-01-11
汽车实用技术(2021年9期)2021-05-26
科学与财富(2019年3期)2019-02-28
东方教育(2017年17期)2017-10-31
电脑知识与技术(2016年7期)2016-05-19
中国高新技术企业(2015年25期)2015-07-24
中国高新技术企业(2015年12期)2015-03-31
现代电子技术(2014年16期)2014-08-20
幼儿智力世界(2009年5期)2009-07-22