手持式三爪夹取器的主要结构设计
2022-10-27 02:41苏州工业职业技术学院徐忠兰
内江科技 2022年9期
◇苏州工业职业技术学院 褚 磊 徐忠兰
本文设计了一种手持式夹取器,便于夹取圆形或不规则物体,夹取力大,易锁紧,夹持平稳防滑,主要从夹头个数、夹头结构、传动机构等几个方面进行了创新设计,满足了市场上夹取圆形物件的专用夹具需求。
1 前言
制造业中涉及到的工序较多,通常需要将半成品工件从一个工位转移到另一个工位继续加工。工件所处环境有时温度较高,有时可能处于腐蚀性液体中,需要用夹具协助转移。环卫工人或公益志愿者捡取垃圾、果皮,废纸、瓶子等,为防止危险物品划伤手、细菌病毒污染手,需要使用夹子协助完成。行动不便者通过夹子可在一定距离内拿取物品。花圃里搬运仙人球花盆需要夹子协助,防止花刺扎伤手。尤其是近两年新冠病毒的传播让我们时刻绷紧神经,勤洗手、少聚集,切断病毒和细菌的传播途径,借助取物夹可以避免直接接触污染的物品,减少病毒细菌的传播。但是目前市面上的取物器或取物夹基本都是两爪,夹取稳定性不高,强度不足,当夹取圆形物体时,由于两爪用力不易平衡,很容易打滑,夹取不方便或滑脱损坏物品。设计一款夹取力大,易锁紧,夹持平稳防滑的夹取器尤为迫切。
因此,本文设计了一种手持式夹取器,便于夹取圆形或不规则物体,夹取力大,易锁紧,夹持平稳防滑,主要从夹头个数、夹头结构、传动机构等几个方面进行了创新设计。
2 夹头个数的优化设计
目前市场上夹子通常是两爪夹头,两爪夹头夹取物品着力点是两处,由于物品形状多样且可能不规则,根据受力分析,两个力很难在同一直线上,很难达到平衡,尤其当夹取圆形物体时会从夹头滑脱,见图1。三爪夹头由于有三个力作用在物体上且向内汇聚很容易达到平衡,夹取平稳,物品不易滑脱,见图2。
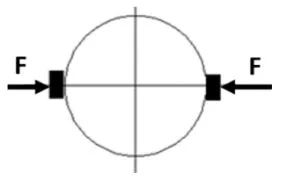
图1 两爪夹头受力图

图2 三爪夹头受力图
3 夹头防滑设计
夹头采用PC材料,PC材料是性能优良的热塑性工程塑料,具有突出的抗冲击能力,耐蠕变和尺寸稳定性好,热稳定性好,吸水率低、无毒,有抑制细菌特性,PC材料相对金属材料有比较高的摩擦系数,可以增大摩擦力。PC材料通过注塑模具能够制造出合适的复杂的夹头形状。夹爪上与被夹物体接触的地方整体采用弧形结构,与圆形物体相适应,增大包容面。另外接触面上设计多根凸起的条棱状,增大夹头与物体的摩擦力,起到防滑作用。夹爪结构示意图见图3。
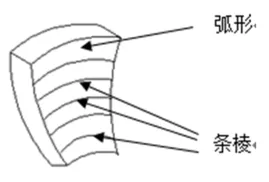
图3 夹爪结构示意图
4 夹头的拉紧传动机构设计
夹头保持常开,夹紧是通过手部动作来实现,从手指的扣机动作到夹子头部夹头的收紧动作需要一套传动机构。拉紧动作可以通过最简单的构件弹簧来实现,手松开靠弹簧的回弹使夹头张开,但是弹簧拉紧力不够稳定,且时间长了容易失效,夹头的夹紧力不足以夹取物品。连杆式拉紧机构结构简单,见图4,能实现运动的传递且夹紧力稳定,看似能实现夹子头部的夹紧,但是在拉杆(构件2)与滑槽配合度要求较高的条件下,机构自由度计算公式如下:自由度个数F=3n-2PL- PH=3*2-2*3-0=0,其中n为连杆式拉紧机构中活动构件的数量,PL为 低副个数,PH为 高副个数,经计算,自由度为0,则机构因为自由度的缺失而无法传递运动,不能实现夹紧。
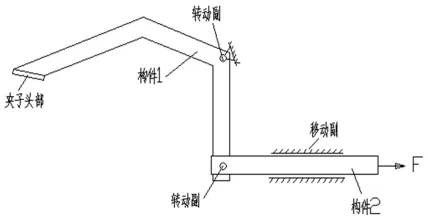
图4 连杆式拉紧机构简图
为解决自由度的问题,对连杆式拉紧机构进行改进,在原先运动受限的结构处增加活动构件的数量,同时也改变了运动副的个数。在构件2和构件1之间增加一个构件3,即增加一个滑槽机构(构件3),见图5,构件3上的槽与构件1上的杆组成一个移动副。机构自由度计算公式如下:自由度个数F=3n-2PL- PH=3*3-2*4-0=1,自由度为1,原动件个数也为1,满足原动件个数=自由度个数≥1,机构具有确定的运动。工作原理如下:拉动拉杆(构件2),通过转动副B带动构件3运动,构件3通过移动副带动构件1绕转动副A点转动,实现夹子头部夹紧。构件均为刚性构件,传动稳定,夹持力大。
5 采用轻型材料
在满足夹取功能的基础上尽可能减轻整个产品的重量,让使用者轻松操作。起机架作用的方管采用塑料,图5中构件2可以设计成钢丝,其它零部件亦可采用塑料注塑成型,既可成复杂一体,又大大减轻重量,节约成本。
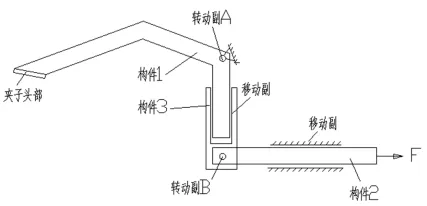
图5 铰链滑块传动机构拉紧示意图
6 结束语
本文对生活中的手持式夹取器进行了创新设计和研究。将常见的两爪改为三爪,增加了夹取的强度、力度和稳定性;夹头材料采用PC材料,增大摩擦系数,夹头结构采用弧形接触面带条棱,增大摩擦力和抓取的稳定性;传动结构采用铰链滑块机构,使传动顺畅省力,效率高,满足了市场的需求。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
林业科技(2022年2期)2022-04-27
智能制造(2021年4期)2021-11-04
学校教育研究(2019年19期)2019-11-23
计算机与网络(2019年10期)2019-09-10
中国建筑金属结构(2018年12期)2018-12-22
智富时代(2018年6期)2018-08-06
智富时代(2018年6期)2018-08-06
课堂内外(小学版)(2017年6期)2017-09-04
少年科学(2015年8期)2015-08-13