烟叶复烤自动摆把上料模式改进初探
2022-10-27 05:48黄军吴忠民吴才松杨江平
物流技术与应用 2022年10期
文 / 黄军 吴忠民 吴才松 杨江平
随着经济不断增长,人工成本与日俱增,“招工难,留工更难”已经成为众多企业面临的普遍问题,利用自动化设备替代人工进行繁重、重复的工作,成为时代发展的必然趋势。然而,在烟草行业,复烤烟叶从烟包出来到输送线摆把上料进行切割这一环节,目前全国所有的烟叶复烤公司仍需采用人工负责。
“摆把”是烟草行业的术语,是指烟叶在打叶复烤生产中,将烟叶从料框中按不同的质量和数量要求取出并摆放到传输工作台上的过程,该过程是整个打叶复烤生产线的第一个步骤,对生产线后续步骤至关重要。
烟叶复烤是对初烤后的烟叶进一步深加工,其目的是对烟叶进行打叶和复烤,去除烟叶的烟梗、按不同质量要求控制烟叶中的水分、理化指标、烟叶色泽、杀虫去菌、去除沙土及杂物、装箱打包。烟叶按质量分类有若干不同的等级,不同香烟品种有各自不同的烟叶等级配方,在生产上就必须按配方要求将不同等级的烟叶配搭后进行打叶和复烤。在摆把工段,根据烟叶配方要求,将不同等级、不同数量的烟叶摆放在生产线传输皮带上,完成配比后由传输带将烟叶送至下一个工序进行生产。
针对目前国内烟叶复烤公司的现状,2021年2月中烟物流技术有限责任公司和重庆烟叶复烤有限公司结合云南曲靖复烤厂及重庆万州复烤厂,对解决人工摆把上料效率低、精度低、人工劳动强度大等问题进行了初步研究和探讨。
一、烟叶摆把工段概况
1.烟叶摆把工段简介
工人利用人工转运车把烟包从仓库(如图1所示)运送至烟叶缓存区(如图2所示),将麻袋里的烟叶取出(如图3所示),人工将分好头尾、厚度均匀的烟叶平整统一朝向的摆在输送线中心位置(如图4所示),烟叶经过输送带流至后段切割设备将烟叶烟梗与烟叶进行分离,在进行后续工序。

图3 人工上料

图2 烟包缓存区

图4 烟叶铺叶区
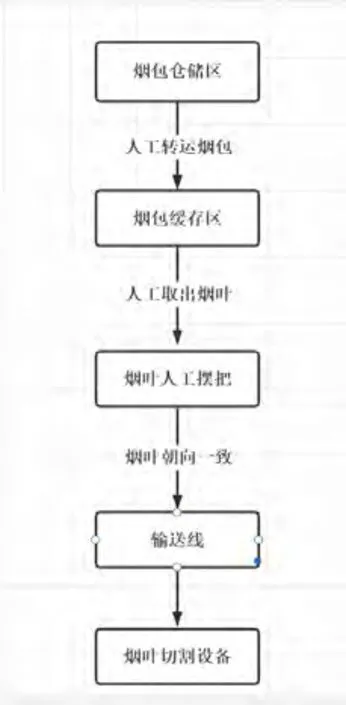
图5 人工摆把上料流程图

图6 人工烟叶摆把布局图
2.烟叶摆把工段流程
一般烟叶复烤厂烟叶摆把的传统流程(如图5所示)主要包括:
3.烟叶摆把工段流程
车间人工摆把布局图,如图6所示。
4.传统人工摆把投料流程的缺点
传统人工摆把投料全程采用人工作业,全部依靠摆把工人采用人工完成烟草量取、转送、放置和铺展,突出的问题主要表现在生产效率低下、摆把精确度低、配方准确率差、劳动强度大、现场工作环境粉尘大、烟味浓厚,以及影响工人身心健康、增加职业病和劳动风险等。由于烟叶打叶复烤生产具有季节性和阶段性,工人的稳定性差,新老员工生产技能参差不齐,往往会影响生产的正常运转;并且费时费力,工人容错率低,工作压力大。
二、方案设计及其实施
1.方案简述
(1)机器人自动摆把上料工作流程
机器人自动摆把上料工作流程(如图7所示):
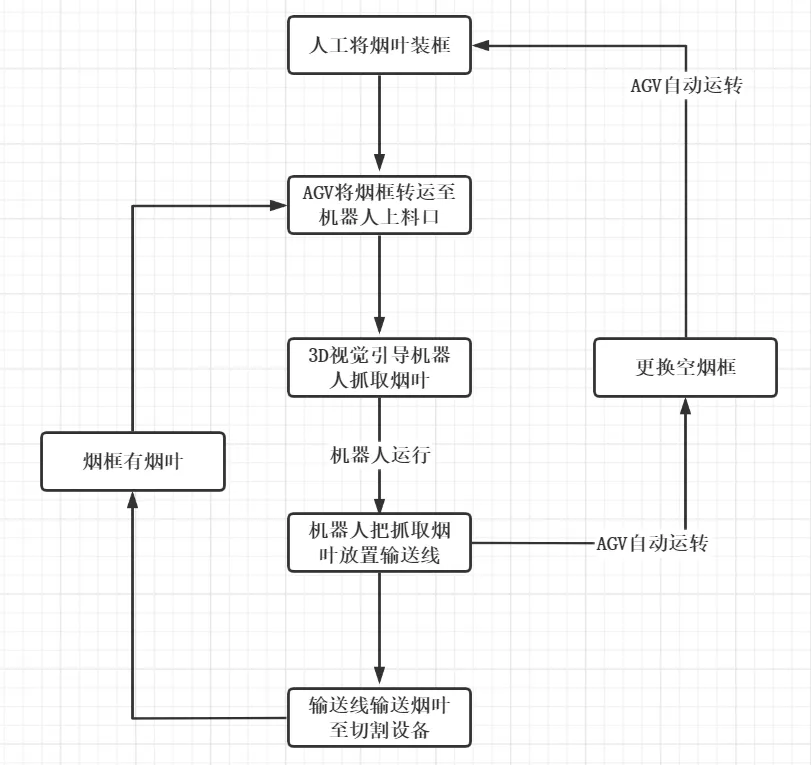
图7 自动化摆把上料流程图
(2)机器人自动摆把上料布局图车间人工摆把布局图,如图8所示。
2.机器人单元
(1)机器人系统
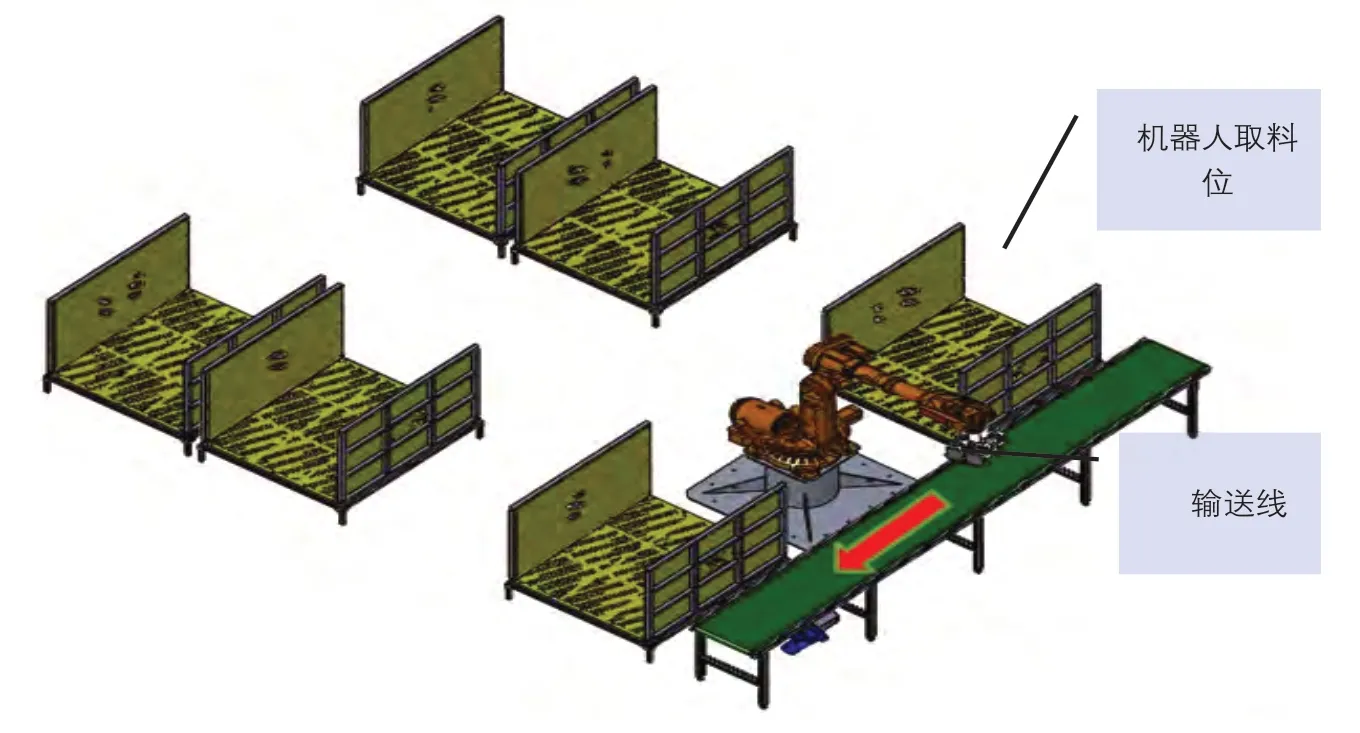
图8 自动化摆把上料布局图

图9 机器人自动上料单元
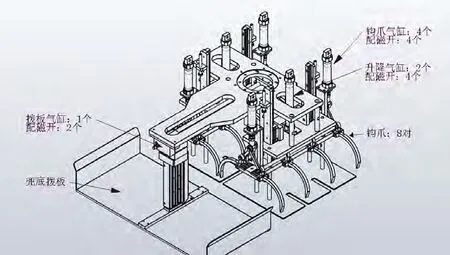
图10 夹具示意图
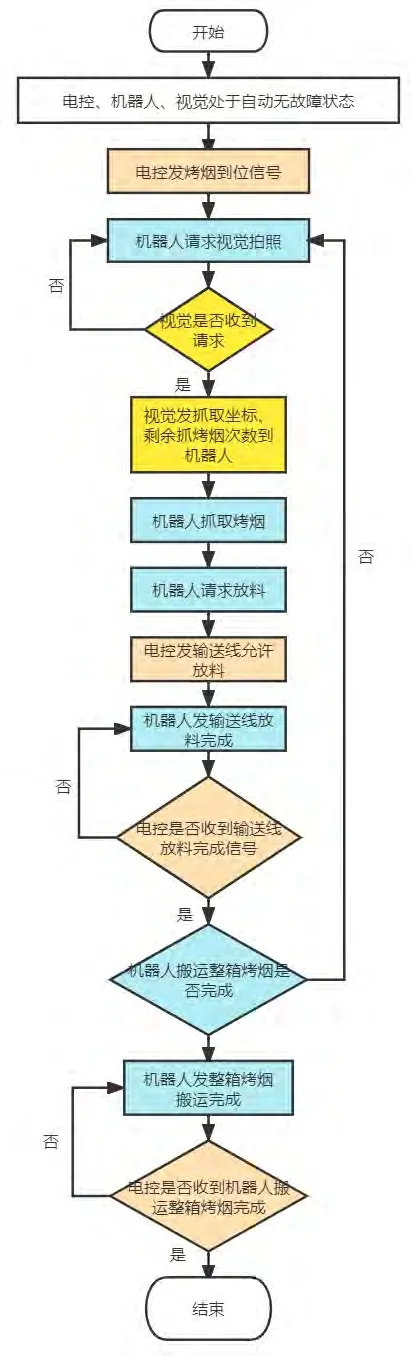
图11 程序流程图
系统采用ABB IRB6700机器人。该机器人拥有3.2 m臂展,负载为150kg,重复定位精度可达0.1mm,机器人控制系统具备PROFINET和以太网两个通信网络,视觉系统通过socket通讯给机器人发送抓取点目标位置(如图9所示)。
(2)烟叶夹具示意图
烟叶夹具示意图,如图10所示。
(3)程序结构
机器人的程序设计是分功能模块设计的,分成主程序、视觉通信程序、自动搬运程序、系统报警程序、IO处理程序。视觉通信程序和自动搬运程序是程序的核心,关系到烤烟搬运的速度和正确率。程序流程图,如图11所示。
3.3D视觉技术
3D视觉传感技术是一种深度传感技术,除了对象的X和Y值之外,还可以记录Z值。 3D坐标系主流的3D光学视觉方案:双目立体视觉法(Stereo Vision,简称“双目法”),结构光法(Structured Light,简称“结构光”)以及飞行时间法(Time of Flight,ToF)。
本方案采用相机选用Mech-Eye Deep 3D智能相机,相机参数见图12。
4.识别算法
(1)相机获取图像,3D智能相机拍照获取深度图和2D图。
(2)点云预处理,将深度图转换为点云,并计算点云的法向量并滤波,提取ROI内的点云。将点云发送给Viz,用于点云碰撞检测等。
(3)预测抓取点的概率分布,此步骤应用了深度学习人工智能算法,对图像进行分割,识别烟叶所在区域(如图13)。

图12 相机参数图

图13 烟叶区域分割图像
(4)根据概率分布图计算抓取点,此步骤中可以计算出抓取坐标点,以及正、反等标签(如图14)。

图14 烟叶抓取坐标图像
(5)设置抓取点个数,一次性可向机器人输出抓取点个数,根据需求设置。
(6)抓取点排序,根据需求对抓取点排序来定义抓取顺序,例如先从左到右、从上到下等。
5.AGV
A G V(A u t o m a t e d G u i d e d Vehicle,自动导引运输车)是装备有电磁或光学等自动导引装置(如图15),能够沿规定的导引路径行驶,具有安全保护以及各种移载功能的运输车。

图15 AGV转运装载单元
本方案采用重载AGV取代原流程中叉车的作用,用AGV实现装载单元从库内到库外的全程转运。
6.实施效果
该烟叶自动摆把上料模式尚处于实验测试阶段,在2022年3月和2022年5月分别在万州复烤厂进行两轮阶段性的测试。本文中提及的烟叶自动摆把上料模式中,所用机器人自动上料单元,取代传统人工上料,减少了人力成本,在效率、铺叶精度上有很大提升(如表1),而且机器人自动化上料可以适应现场环境烟味重、粉尘多等问题。
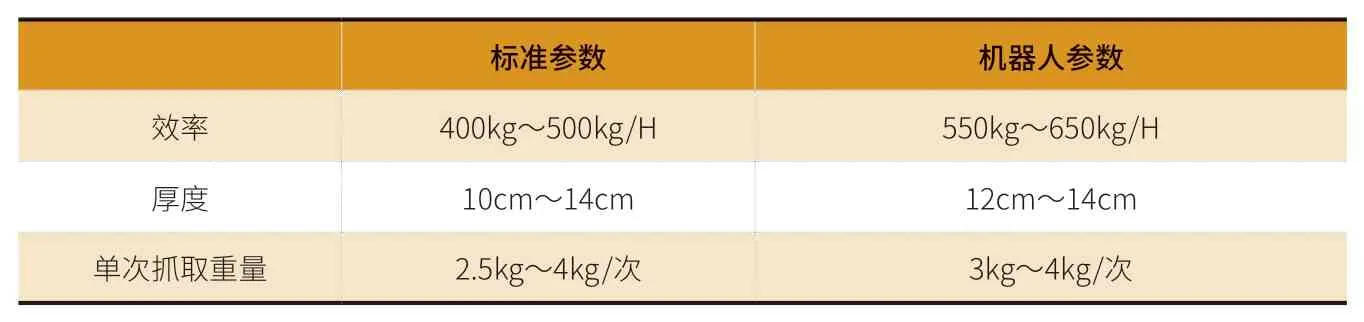
表1 参数对比表
三、结论
国内现有的摆把工段全部是人工完成,属于劳动密集型工种,主要依靠摆把工人采用人工完成烟草量取、转送、放置和铺展,该模式的研究应用为烟叶打叶复烤环节国内首创,实现了一种烟叶复烤自动摆把配料的全新方法,取代了传统人工摆把和配料方法,可提高配方精度,提升复烤烟叶质量。
同时,其研究成果预期可应用于复烤公司易地技改项目,未来可在国内其他复烤企业推广应用,对 “智慧复烤”项目建设、“互联网+烟叶”建设起到推动作用,对烟草农业数字化转型具有重要创新示范意义。
猜你喜欢
湖南农业大学学报(自然科学版)(2021年6期)2022-01-07
贵州农业科学(2021年12期)2022-01-04
科学与信息化(2020年28期)2020-12-21
西南农业学报(2020年9期)2020-12-10
建筑与装饰(2020年20期)2020-08-20
科技风(2019年17期)2019-10-21
活力(2019年15期)2019-09-25
山东工业技术(2018年15期)2018-09-26
中国新技术新产品(2016年1期)2016-12-12
广西教育·C版(2016年10期)2016-12-07