
智能跟随小车的设计与制作
2022-10-30 12:11张春梅温新权胡高天李政权
机电产品开发与创新 2022年5期
张春梅, 温新权, 胡高天, 李政权
(广西科技师范学院, 广西 来宾 546100)
0 引言
自20 世纪70 年代以来, 国内外在对智能小车的研究上取得许多突破性成果, 但目前还没研制出一款针对解放双手的跟随小车。此外,红外线成像等技术近年来发展迅猛,相应的元器件也从军品转民用,从纯进口到国产化,为我们智能跟随小车的研制提供便利。
近些年,我国向全面小康稳步迈进,但我国老龄化日趋严重,这造成了一个严重的社会问题:四到八个老人和三个孩子得由两个年轻人赡养。此外,随着社会竞争日渐激烈,很多在职人员选择在职考研、考证,这形成了繁忙的快节奏生活,而适当放松,保持良好心情的人群工作效率更高,患病概率也更小。 因此,解放双手成了广大年轻人的强烈愿望。
1 小车硬件设计及实现
1.1 针对上述问题的解决方案
为解决上述问题,本文提出下列技术方案:一种智能跟随小车,智能跟随小车结构示意图见图1,包括车体、传动机构、遥控手环及控制模块。 车体设有锂电池,与控制模块电连接,保障小车的电力供给;设有储存仓,顶部设有与储存仓连通的开口,用于外出时存放物;设有射频标签及射频天线,遥控手环设有射频阅读器,以使遥控手环获得射频标签的位置信息与控制模块通信连接; 设有语音对话模块,实现人机对话;设有语音报警以及心率检测模块,为老年人的生命健康提供保障;针对没有电梯的楼层设有爬楼辅助装置, 小车爬楼辅助装置结构示意图见图2。
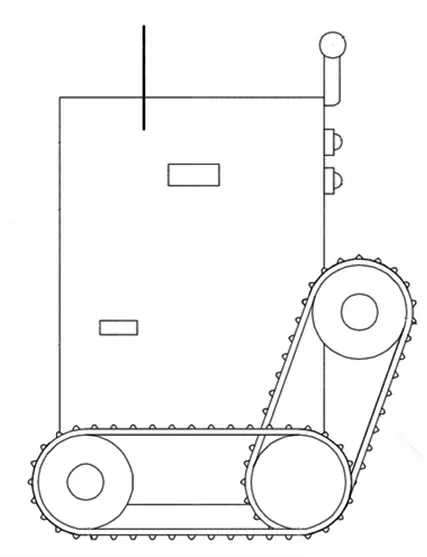
图1 智能跟随小车的结构示意图
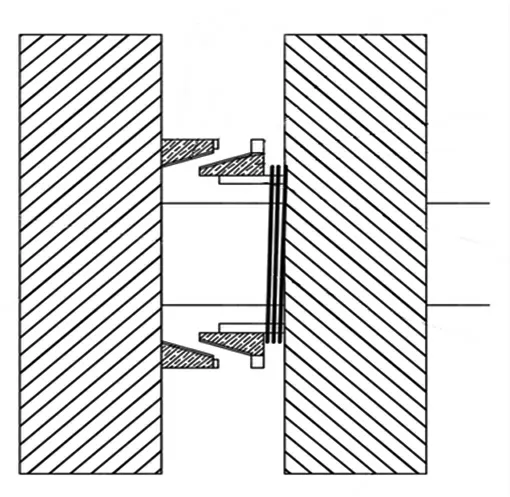
图2 小车爬楼辅助装置结构示意图
1.2 小车整体构架
智能跟随小车采用体积小、 重量轻、 能量密度高的18650 锂电池,保障小车的正常电力供给,智能跟随小车控制模块框图,见图3,包括驱动轮、RF 射频模块、语音报警模块、语音对话模块、红外避障模块、超声波测距模块、LM1602 液晶显示模块。 调节拨动开关连通电源,步进电机驱动小车前进,小车按照设置的程序正常行驶。红外模块检测前方障碍物, 当检测到障碍物并小于预设值时反馈给单片机。 单片机控制驱动电路,调节车轮转动,绕过障碍物继续前进。同时,通过超声波模块测量障碍物与小车之间的距离是否在预设值内, 并通过LM1602 液晶模块显示距离, 当超出预设值则发出警报提醒使用者避开障碍物。 语音报警功能用以小车脱离跟随范围后以及前方有障碍物发出提醒。

图3 智能跟随小车的控制框图
1.3 小车各模块运用的技术
1.3.1 单片机控制模块
智能跟随小车使用STC89C52RC 型号单片机, 成本低、性能好、自带RC 时钟振荡电路,在不接外部晶振情况下也可为电路提供时钟信号。它可直接使用原始程序;体积小可放在仪器内部;保密性强,无法解密。 P0 和P2具有单片机地址、 数据总线口作用,P3 口可用于控制定时、计数器。 XTAL1(第18、19 脚)外接晶振用于产生脉冲,为MCU 工作提供时钟信号。 P0 口接LM1602 液晶显示器,P3 口接红外避障模块和超声波测距模块。
1.3.2 红外避障模块
智能跟随小车装有红外避障模块, 该模块使用高精度、低功耗的LM393 双电压比较器集成电路,接通电源时输出一个高电平给红外发射管V1、V5, 发射管发出红外线, 电阻R9、R10 为限流电阻, 用来保护发射管V1、V2,避免电压过高把发射管击穿。红外接收管是一个光敏二极管, 内部有一个PN 结, 接反向电压才能正常工作。当前方无障碍物无红外光反射回来时,二极管未导通,比较器输出高电平;当前方有障碍物接收到红外光时,二极管导通,比较器输出低电平。此时发光二极管D1/D3 接通并发光,表示障碍物在小车左侧/右侧。 此外,可通过电位器旋钮W1、W3 调节检测距离, 有效距离范围为2~80cm。 红外避障模块利用单片机P3 口上的定时器实时检测红外信号反射情况,12MHz 晶振产生周期为2ms 的方波,实现1ms 检测一次红外光并反馈,当小车前方出现障碍物时接收到一个低电平,小车避开障碍物。
1.3.3 超声测距模块
超声波测距模块HC-SR04 主要由两个超声波传感器组成, 分为发射和接收模块。 该模块使用了体积小的STC11 单 片 机, 利 于 节 省 模 块 空 间,P6.4、P6.5 口 外 接12MHz 晶振给单片机提供脉冲信号定时检测超声波信号接收情况,P5.0 口接收到TRIG 发送端信号后发送一段超声波波形给MAX232, 然后P6.0 口返回一段ECHO 接收端信号,单片机检测到信号后,测量从触发到回波接收的时间差,转换距离[4]。 接收到信号后检测高电平持续时间转换成小车与障碍物的距离再将数据传送到STC89C52RC单片机显示在LM1602 液晶显示屏上。其中,52 单片机的P2.1 口连接到控制端TRIG,P2.0 口连接到返回端ECH0,用于接收超声波模块检测到的障碍物与小车的距离。
测量的障碍物距离由LM1602(液晶模块,两行,每行16 个字符)显示,V0(第三脚)通过10kΩ 电位器调整显示对比度。 连接到P3.3 口的RS(引脚4):高电平为1 时选择数据寄存器,低电平为0 时选择指令寄存器。RW(第五脚)连接到P3.4 口。高电平读数据,低电平写数据。En(引脚6)是使能端,当高电平变为低电平时,读/写操作有效。D0~D7(引脚7~14)为8 位双向数据终端,其中D0 必须连接到单片机的最低位P0.0 口。 第15 个引脚是背光源的正极,用于为LED 供电并照亮LM1206。 第16 个引脚是背光源负极。
1.3.4 RF 射频模块
与红外模块相比, 射频通信模块具有更高的传输功率和更长的传输距离,适用于恶劣条件下的通信。模块运行时,主要将无线通信信号转换成一定的无线信号波形,然后通过天线谐振发送出去。工作时,特定频率的射频信号由读卡器通过发射天线发送出去。 当发射天线的工作区域有射频卡进入时会产生感应电流, 并通过射频卡内置的发射天线把自己的编码和其它信息发送出去。 在操作过程中,若手环的接收天线收到一个载波信号,这个信号需要经过天线调节器才能正常传送到阅读器, 再利用阅读器对接收到的信号进行解调和解码后才能送到后台的主系统进行相关处理; 该卡的合法性由主系统根据逻辑运算判断,并针对不同设定做出对应的处理和控制,发出相应的指令信号去控制执行机构动作[5],可实现小车自动跟随、老人心率异常自动报警呼救。
1.3.5 语音报警模块
语音报警模块用于小车跟丢、 老人心率异常等情况进行语音报警,模块事先设定好声音,根据设定的情况播放出特定的声音,以警示使用者。 该模块使用了JQ8900-16P 芯片,BUSY(管脚2)接一个指示灯,当有音频播放时管脚输出高电平,指示灯被点亮,无语音播放时管脚输出低电平,指示灯熄灭。RX(管脚3)、TX(管脚4)用于输入、输出串行数据。 DAC(管脚16)用于音频的输出,可以外接一个功放。 SPK(管脚7、8)接无源喇叭,用于播放音频。IO1~IO7(管脚9~管脚15)用来触发输入口播放设定好的声音。
1.3.6 心率检测模块
心率检测模块利用反射式光电心率传感器的光学原理检测流经皮肤的血液流量, 通过专用软件算法处理得到当前的心率,我们称之为LED 侦测法。 因为血液倾向于吸收绿光反射红光,将该模块安装在手环上,手环将一束光打在皮肤上, 心脏在收缩和舒张时会产生颜色不同的反射光,手环可以通过检测这些反射光来记录心率,当检测到心率不正常时发射一个RF 射频信号给小车触发语音报警。 该模块主要用到反射式光学传感器TCRT1000/LTH1550/SFH7050、精密运算放大器LST221。
1.3.7 语音对话模块
利用现有的比较成熟的语音对话技术模块拼接到小车上,通过语音识别技术(ASR)识别出使用者说话的内容(NLP),进行算法分析查询相应的数据库后反馈回相应的答复,实现人机对话。
2 小车系统程序设计与实现
2.1 STC89C52RC 单片机红外避障程序
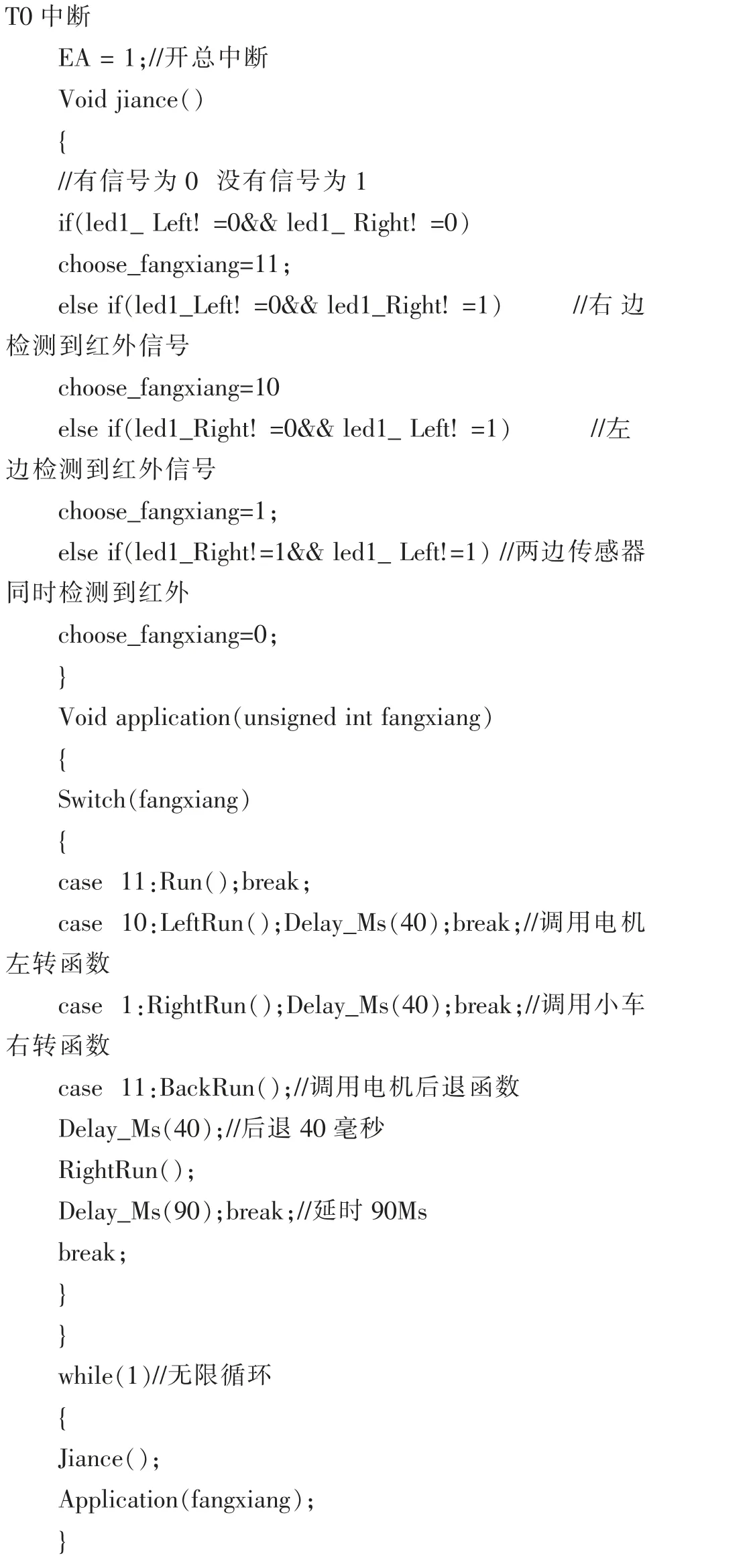
利用单片机P3 口的TMOD 寄存器检测红外线接收情况,控制小车及进行红外避障。当检测到右侧有障碍物时,小车向左行驶;当检测到左侧有障碍物时,小车向右行驶;当检测到两侧都有障碍物时,小车向后退。 红外避障模块程序框图见图4。
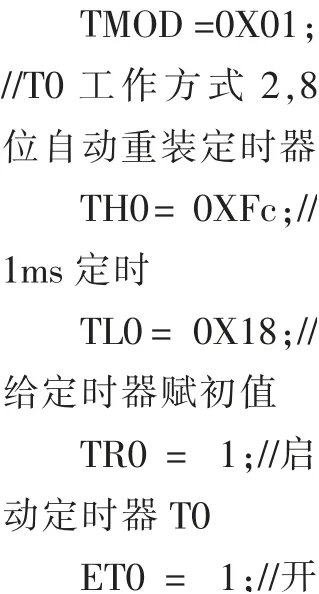

图4 红外避障模块程序框图
2.2 STC89C52RC 单片机超声波测距程序
使用模块:HC-SR04,74ALS04,LM1602 液晶显示器。
HC-SR04 超声波测距模块可提供2cm-400cm 的非接触式距离感测功能, 测距精度可达到3mm; 该模块包括超声波发射器、接收器和控制电路[6]。 模块发送端TRIG接单片机的P2.1 口,接收端ECH0 接P2.0 口,用P3 口的定时器进行定时, 实时监测接收端高电平持续时间从而计算出小车与障碍物的距离显示在LM1602 上,实现测距功能。且检测到小车前方有障碍物时发出警报, 提醒人们躲避障碍物,超声波测距程序框图见图5。


图5 超声波测距程序框图

3 结束语
现如今,社会飞速发展,各式各样的人工智能走入普通百姓的生活,给大家带来许多便利,但年轻人也把更多时间、心思放在工作上,外出务工人数增加,导致留守儿童、空巢老人数量剧增。三胎政策的开放也让年轻妈妈可以多生几个宝宝,但一个妈妈要同时带几个孩子,还要做家务、忙工作,甚至还要学习提升自己,实在忙不过来。这些问题结合起来就变成一个相当大的问题, 它对人们的工作生活造成极大影响。 研究开发一款智能跟随小车在一定程度上解放了人们的双手, 也让留守儿童和空巢老人得到更多的陪伴,实现一物多用,具有一定意义。
本研究也存在一些不足, 例如, 小车续航时间不够长,载重能力不够强,遇到泥泞道路、陡坡会影响小车的前进。解决办法是给小车电池增设太阳能充电模块,可自行充电,给车轮增设防滑、爬坡模块并尽量选择质量轻的材料来制作小车,。 本研究没有与GPS 导航系统关联,因而无法为使用者导航,把他们带到任何想去的地方,后期可通过网络协议与GPS 导航系统关联。
猜你喜欢
电子制作(2021年21期)2021-11-10
动漫界·幼教365(中班)(2020年3期)2020-04-20
创新作文(1-2年级)(2019年4期)2019-10-15
科技传播(2019年15期)2019-08-22
计算机与数字工程(2019年4期)2019-05-07
好孩子画报(2019年10期)2019-01-10
现代职业教育·中职中专(2017年2期)2017-08-13
电子技术与软件工程(2017年10期)2017-06-02
电子技术与软件工程(2017年2期)2017-03-15
中国新通信(2017年1期)2017-03-08
