自动化集装箱码头总体技术路线的选择
2022-11-01 05:57麦宇雄许鸿贯彭骏骏
水运工程 2022年10期
王 烽,麦宇雄,许鸿贯,彭骏骏
(中交第四航务工程勘察设计院有限公司,广东 广州 510290)
1 全自动化集装箱码头总体技术路线现状
经过近30年发展,国内外已建和在建的自动化集装箱码头近50座,其中可以实现全自动化装卸作业的码头总体技术路线见表1。
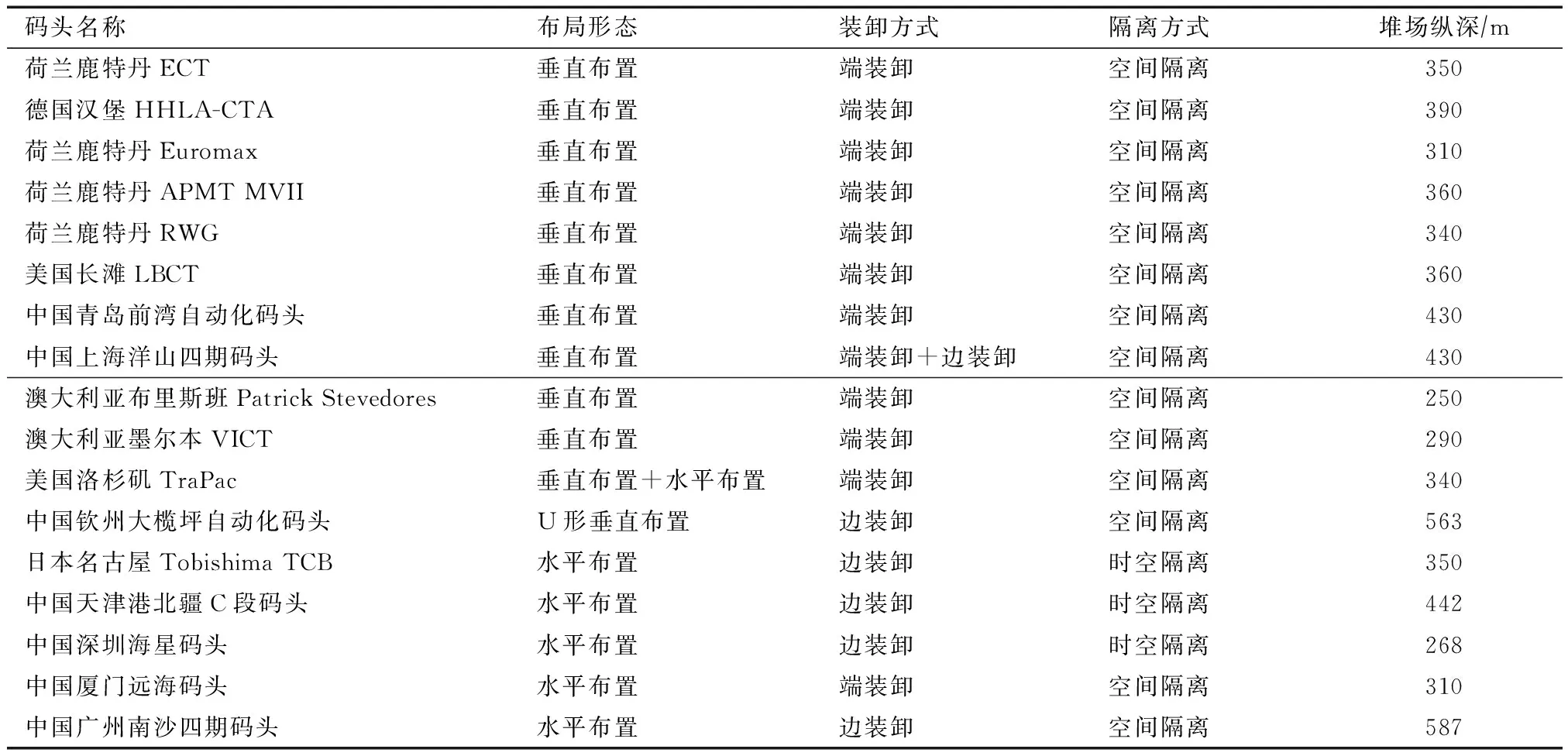
表1 国内外已建全自动化集装箱码头总体技术路线现状
从码头的空间布局形态来看,可分为垂直和平行码头布置两种方式,其中垂直布置分为传统垂直布置和U形垂直布置。
从堆场装卸方式来看,可以分为端装卸和边装卸两种方式;其中端装卸是指集装箱水平运输设备不进入堆箱区内,仅在堆箱区两侧端部进行交互作业的装卸方式;边装卸是指集装箱水平运输设备进入堆箱区内任意贝位的边侧进行交互作业的装卸方式。
从隔离方式来看,可以分为空间和时空隔离两种方式,其中空间隔离通过物理围网手段实现自动化区和非自动化区的空间隔离;时空隔离则通过智能交通灯临时管控措施实现自动化区和非自动化区时间和空间上的隔离。
2 自动化集装箱码头总体技术路线分类
2.1 “传统垂直布置+端装卸+空间隔离”总体技术路线
“传统垂直布置+端装卸+空间隔离”总体技术路线是目前应用最广泛、技术最为成熟的全自动化集装箱码头解决方案,以荷兰鹿特丹Euromax、德国汉堡HHLA-CTA、美国长滩LBCT、中国青岛前湾自动化码头等为代表,其特点如下:
1)集疏运方式主要为公路(即使部分铁路运输,也通过陆侧交互),堆场采用传统垂直码头布置,见图1。堆场作业方式为端装卸(除洋山四期部分堆场采用边装卸),在每个箱条两端分别设置海侧交互区和陆侧交互区,通过围网进行空间物理隔离,内外集卡不进入堆场,集中在海侧交互区和陆侧交互区作业,交通组织简单。
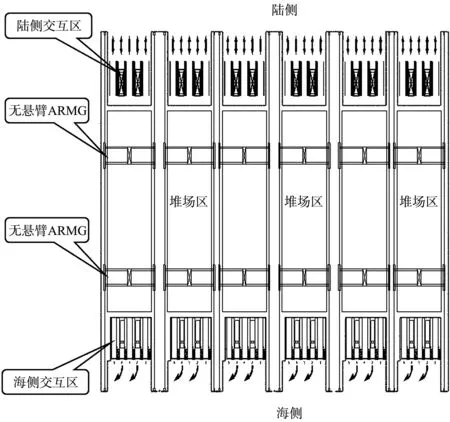
图1 传统垂直布置堆场
2)每个箱条一般配置2台高速自动化轨道吊(ARMG),堆场内由高速ARMG带箱运行并进行接力作业,轨道基础投资大,运营能耗高、成本高,一般堆场纵深为350 m比较经济合理。
3)堆场采用无悬臂ARMG(除洋山四期部分堆场采用单悬臂和双悬臂),堆场利用率较高,比较适合陆域紧张的港口。
4)外集卡集中在端部陆侧交互区作业,受端部装卸车位数量限制,出箱点较少。对于海关查验后集中放行的港口,会出现集中到港提箱的现象,导致高峰期陆侧交互区拥堵。同时,港外集卡须倒车进入装卸车位作业,司机体验感较差。
2.2 “U形垂直布置+边装卸+空间隔离”总体技术路线
“U形垂直布置+边装卸+空间隔离”总体技术路线是在“传统垂直布置+端装卸+空间隔离”总体技术路线基础上优化而来的一种全新全自动化集装箱码头解决方案,并在我国广西钦州大榄坪自动化集装箱码头得到首次应用[1],该技术路线特点如下:
1)集疏运方式以公路为主,部分铁路运输和水水中转。由于堆场纵深大,外集卡集中到港情况突出,传统垂直布置的轨道吊带箱运行距离长、运营成本高,高峰期陆侧交互区车流量较大、出箱点少,生产效率受影响。因此,在传统垂直布置的基础上,考虑在箱区内设置外集卡通行的U形车道以及箱区外设置内集卡作业车道,堆场采用边装卸方式,内外集卡均可直接进入堆场任意贝位边侧进行装卸作业,增加出箱点。对于堆场纵深较大的码头更具有适应性,堆场可根据实际装卸作业需求配置多台轨道吊,设备扩展性更好。
2)堆场为U形垂直布置,见图2。围绕堆箱区成组两两相对布置,每组内包括2条堆箱区、1条港外集卡装卸作业U形通道和1条智能导引车(IGV)装卸作业通道,堆箱区上为自动化双悬臂ARMG。U形通道供港外集卡由陆侧主干道进入箱区间进行装卸作业及离场并返回至陆侧主干道,IGV装卸运输通道布置在双悬臂轨道吊的另一侧外悬臂下。
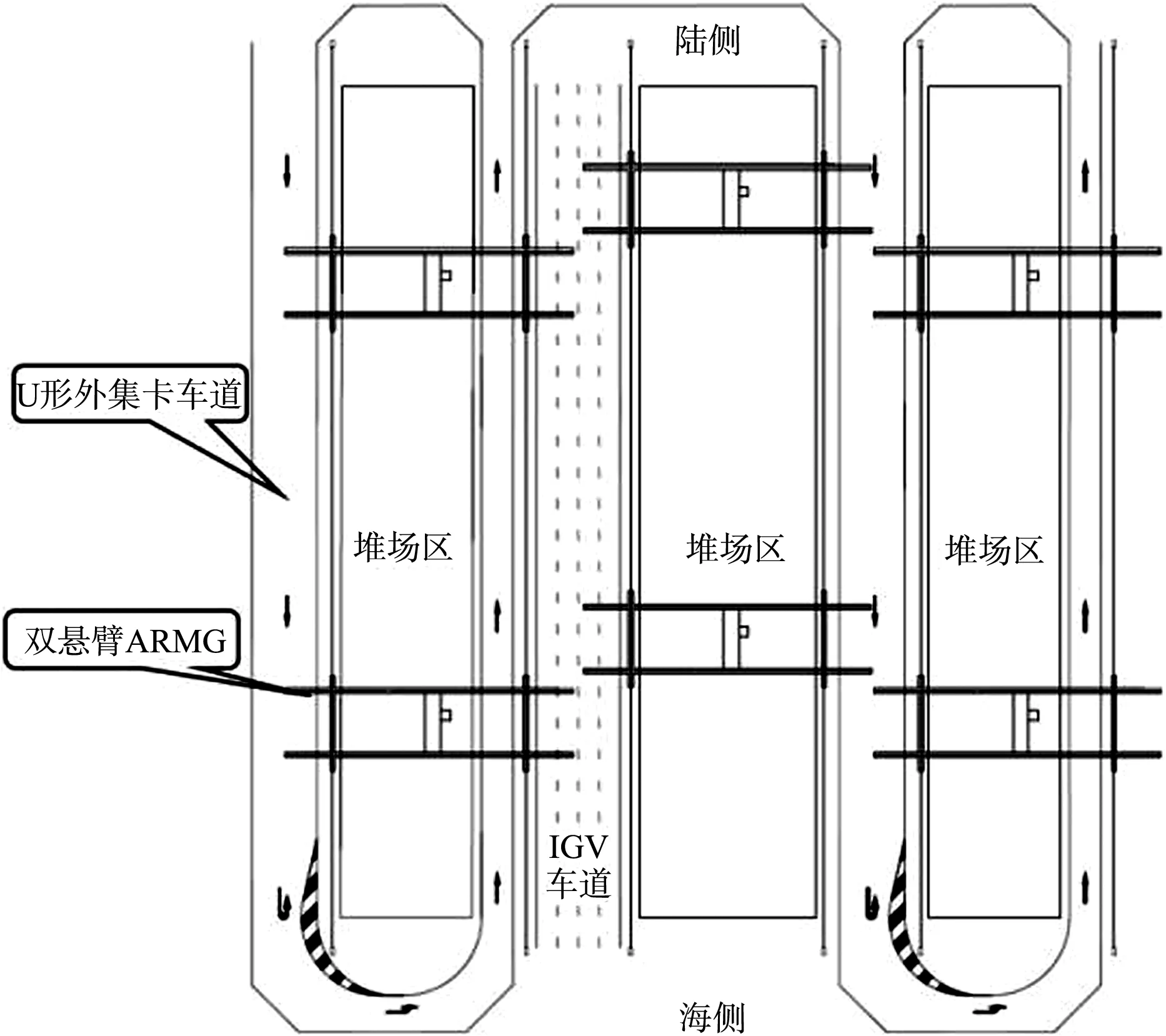
图2 U形垂直布置堆场
3)堆场采用低速ARMG不带箱运行,有效降低工程投资和运营成本。
4)堆场设备采用双悬臂ARMG,U形车道以及IGV车道占用面积较多,适用于陆域面积充足的港口。未来随着L5级内外集卡混行技术的成熟,可以将U 形车道调整为箱位,提高堆场利用率。
5)堆场出箱点多,装卸效率更高,对于公路集疏运比例高、集中到港明显的港口具有竞争优势。同时,港外集卡无需倒车进入装卸车位作业,司机体验感较好。
2.3 “水平布置+边装卸+空间隔离”总体技术路线
采用“水平布置+边装卸+空间隔离”总体技术路线的全自动化集装箱码头为广州港南沙港区四期码头工程[2-3],该技术路线特点如下:
1)集疏运方式以江海联运为主,水水中转比例达85%以上,公路集疏运比例低。海轮泊位侧面布置有驳船泊位,堆场采用平行码头布置,海轮泊位和驳船泊位的车辆更方便进入堆场边侧进行装卸作业,减少运输路径,降低运输成本,提高运营效率。
2)针对公路集疏运比例低的特点,在自动化集装箱堆场后方设置集中的内外集卡交互作业区,断面见图3。利用内外交互区将自动化区域和非自动化区域进行空间物理隔离。内外交互区采用双悬臂ARMG作业,悬臂两侧分别对应外集卡作业车道和IGV作业车道。

图3 集中交互作业区断面
3)自动化堆场为水平布置,采用边装卸方式,IGV进入堆场任意贝位边侧进行装卸作业。
4)堆场采用低速ARMG不带箱运行,可有效降低工程投资和运营成本。
5)内外交互区增加集装箱中转作业流程,适合水水中转比例较高、公路集疏运比例较低的港口。
2.4 “水平布置+边装卸+时空隔离”总体技术路线
采用“水平布置+边装卸+时空隔离”总体技术路线的全自动化集装箱码头有日本名古屋港Tobishima TCB码头、天津北疆C段自动化码头和深圳海星自动化码头,该技术路线特点如下:
1)堆场采用传统的水平布置,外集卡车流和AGV车流分别按照顺时针和逆时针方向循环行驶,在两侧端部内外集卡进箱区处设置智能交通灯,控制内外集卡进出安全,属于时空隔离技术,交通流向见图4。
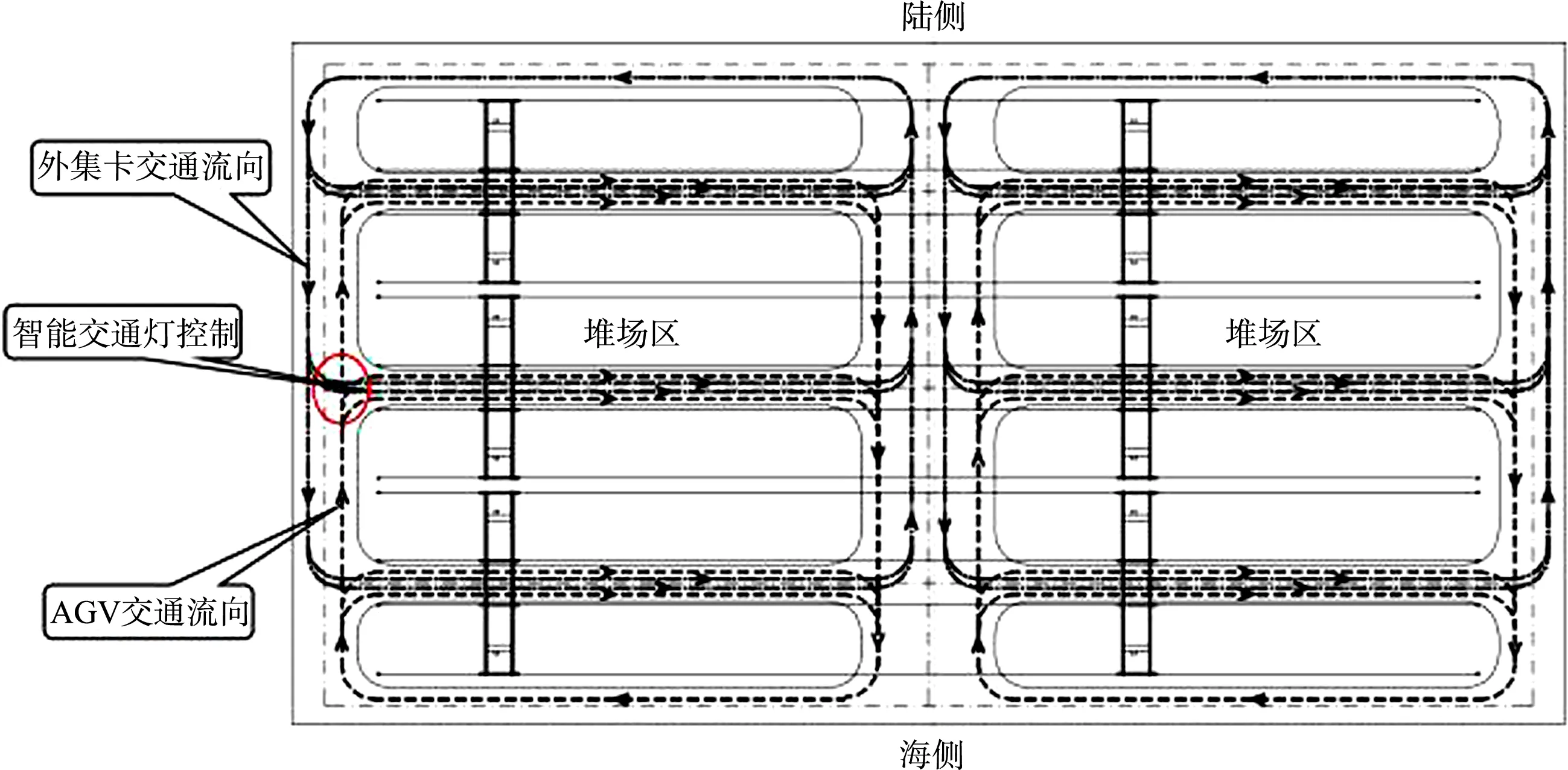
图4 时空隔离水平布置交通流向
2)堆场采用边装卸方式,内外集卡均可直接进入堆场任意贝位边侧进行装卸作业,堆场采用低速ARMG不带箱运行,具有出箱点多、工程投资低、运营成本低、设备扩展性好等优点。
3)根据堆场装卸工艺设备的不同,堆场断面布置形式有所差异。
日本名古屋港Tobishima TCB码头的堆场采用自动轮胎吊(ARTG),外集卡车道和内集卡车道均布置在ARTG内一侧,相互干扰较大,断面见图5a);天津北疆C段自动化码头堆场采用双悬臂ARMG[4],外集卡车道和内集卡车道分别布置在ARMG悬臂两侧,内外集卡车流分离,相互干扰少,断面见图5b);由于堆场面积受限,深圳海星自动化码头堆场采用单悬臂ARMG[5],内外集卡车道均布置在ARMG悬臂一侧,相互干扰较大,断面见图5c)。
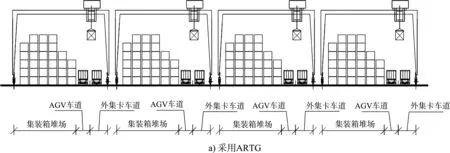
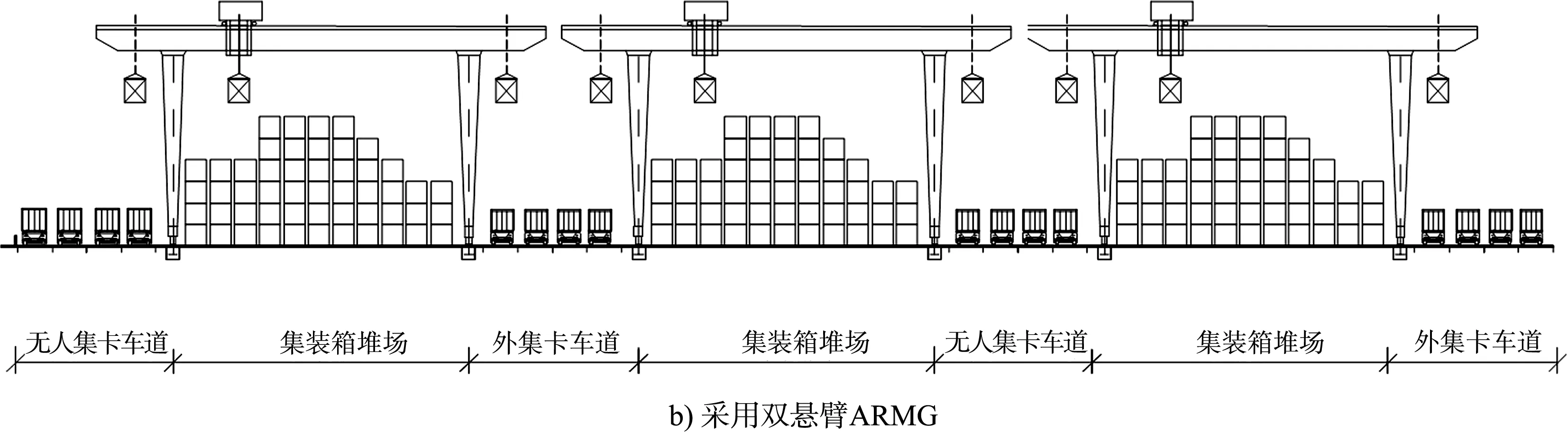

图5 堆场作业断面
4)通过时空隔离技术控制,内外集卡存在交叉干扰,作业效率受到影响,一般适用于中等规模的自动化集装箱码头。
3 各种典型总体技术路线对比分析及适用性建议
上述4种典型自动化集装箱码头总体技术路线的对比分析及适用性建议见表2。
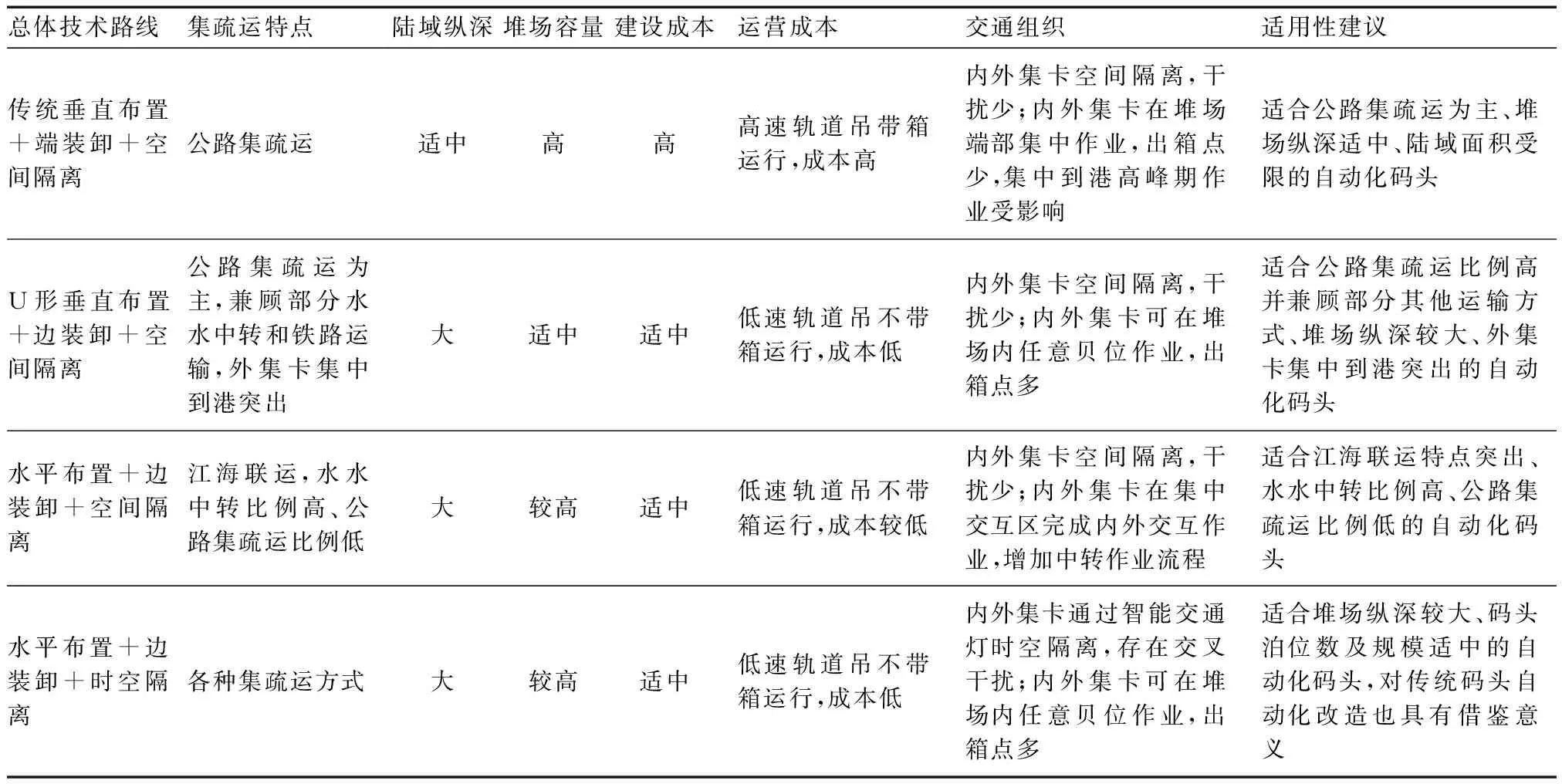
表2 各种典型总体技术路线的对比分析及适用性建议
4 结语
1)通过总结分析,按照平面布局形态、装卸方式和隔离方式的不同,目前国内外有4种典型的自动化集装箱码头总体技术路线,分别有各自的技术特点和适用性。自动化集装箱码头须结合自动化程度、投资、当前自动化技术水平以及项目自身特点,选择合适的总体技术路线。
2)近年来,行业内也在探索自动化集装箱码头向空间上发展,提出了各种立体自动化集装箱码头技术路线,对于用地紧张的港口具有一定的借鉴意义。
猜你喜欢
交通科技与管理(2022年8期)2022-05-07
现代电子技术(2022年3期)2022-02-16
浙江人大(2021年11期)2021-12-12
集装箱化(2020年7期)2020-06-20
百科探秘·航空航天(2019年8期)2019-08-01
集装箱化(2016年11期)2017-03-29
科技创新与应用(2017年3期)2017-02-18
三联生活周刊(2017年1期)2017-01-11
集装箱化(2016年8期)2016-10-20
集装箱化(2014年12期)2015-01-06