船舶操纵性实时监测系统设计实验分析
2022-11-07 05:35杨旺林杨松林
交通科技与管理 2022年20期
王 俊,杨旺林,杨松林
(镇江瑞舟船舶监理有限公司,江苏 镇江 212004)
0 引言
一些船舶航行水域多变,对操纵性提出较高要求。研究船舶运动要建立精确的数学模型。目前建立数学模型主要有机理建模法和辨识建模法。基于系统辨识对实验数据进行辨识,可有效确定船舶水动力导数。随着系统辨识的不断发展以及船舶模型实验数据采集方法的日益优化,系统辨识研究船舶性能已广泛应用[1-5]。
船舶操纵性,要求船舶能按照实际需要在一定允许范围内调整或保持航向、位置、航速等。主要包括:航向稳定性、停船性能、回转性、转首性和跟从性[6]。
目前对于船舶操纵性数学模型的研究主要有两方面[7-8]:一是利用线性操纵运动方程、MMG操纵运动方程、Abkowitz运动方程等船舶基本运动方程,确定船舶操纵运动水动力;二是将船舶作为一个动态系统,以操舵作为输入,船舶运动作为输出,运用的主要是控制理论。
该文研究的核心内容是船舶操纵性实时监测系统的设计研究。建立船舶操纵性系统辨识模型,实时对一艘滑行艇模型进行操纵性辨识,包括建立船载传感器系统或船载电脑与岸机之间数据的实时传输及相关显示或分析系统。通过对船模操纵性实时监测,验证所设计监测系统的可靠性。主要内容包括:船舶操纵性实时监测硬件系统、软件系统设计以及实验验证。
1 船舶操纵性实时监测系统搭建
1.1 实验模型
该次实验选用了江苏科技大学船模室的一艘无人滑行艇模型,其主尺度如下(见表1)。
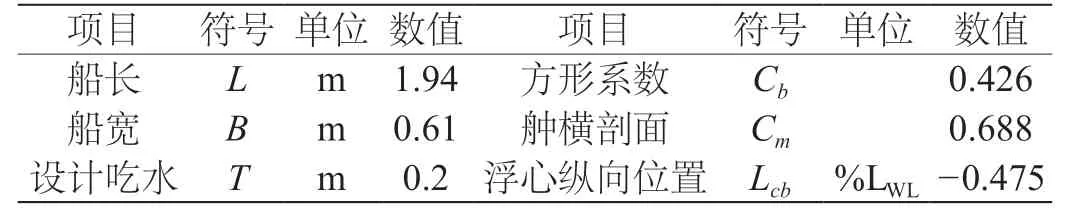
表1 船模主要参数
1.2 硬件系统
要实现对船模操纵性实时监测,船模需包含核心控制系统、姿态测量系统、导航定位系统、数据传输系统、数据分析系统、能源系统,各系统有机结合,组成船舶操纵性实时监测的硬件系统(见图1)。
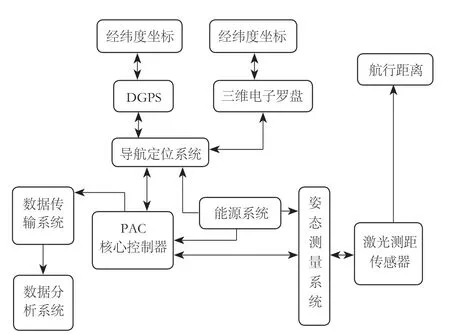
图1 硬件系统框架图
1.3 软件系统
操纵性实时监测软件系统,要建立操纵性数学模型,进而确定相关性能的监测方法。首先建立操纵性数学模型,然后运用系统辨识的方法对操纵性进行实时监测,对所需数据进行测量、传输,再由岸机电脑进行计算。
回转性能是衡量船舶操纵性的重要标准。船舶在转向、调头、进出港时需要具备良好的机动性能,都对回转性能提出较高要求。定常回转是船舶操纵性实验的重要内容。因此该文建立的船舶操纵性数学模型为回转运动数学模型。
范尚雍曾根据众多实船和自航船模的实验资料整理了与Fr相关的曲线,在《舰船船体规范》中也给出了高速船的DS/DS0公式[9]:

式中,DS0——Fr≤0.25时的回转直径;DS——回转直径。为确保辨识的精确度,在上式基础上,对多项式进行拟合,确立了辨识模型,对变量进行了无因次化处理。
设相对回转直径DL=D/L,其中D为回转直径,L为船长,回转直径与速度呈正相关,与舵角成反相关。假设:


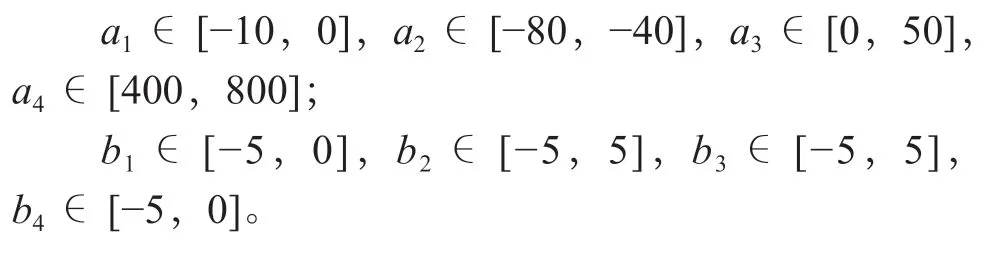
式中,a1、a2、a3、a4、b1、b2、b3、b4——辨识参数;N——实验数据组数;DLi——实测相对回转直径数据。优化计算时,目标函数值越小越好。根据多次计算设定辨识参数的上下限为:
2 船舶操纵性实时监测系统船模实验及分析
2.1 操纵性实时监测实验方案
回转实验在江苏科技大学一游泳池中进行,长50 m,宽25 m,水深1.9 m。基于VB.NET语言编写了船模回转运动控制程序,通过在核心控制器PAC中设置不同的舵角,使船模按设定程序完成回转实验。船模上的DGPS和三维电子罗盘能有效采集船模在实验过程中的位置、艏向角、航速等信息。通过加载配重,变换主机转速,该文设计了1.5~1.9 V逐级递增五种控制电压和20°、25°、30°、35°四种不同舵角(左舵)进行回转实验,进而实现对船模操行性能的实时监测。
2.2 操纵性实时监测实验情况与分析(见图2~3、表2~4)

图2 操纵性实时监测实验
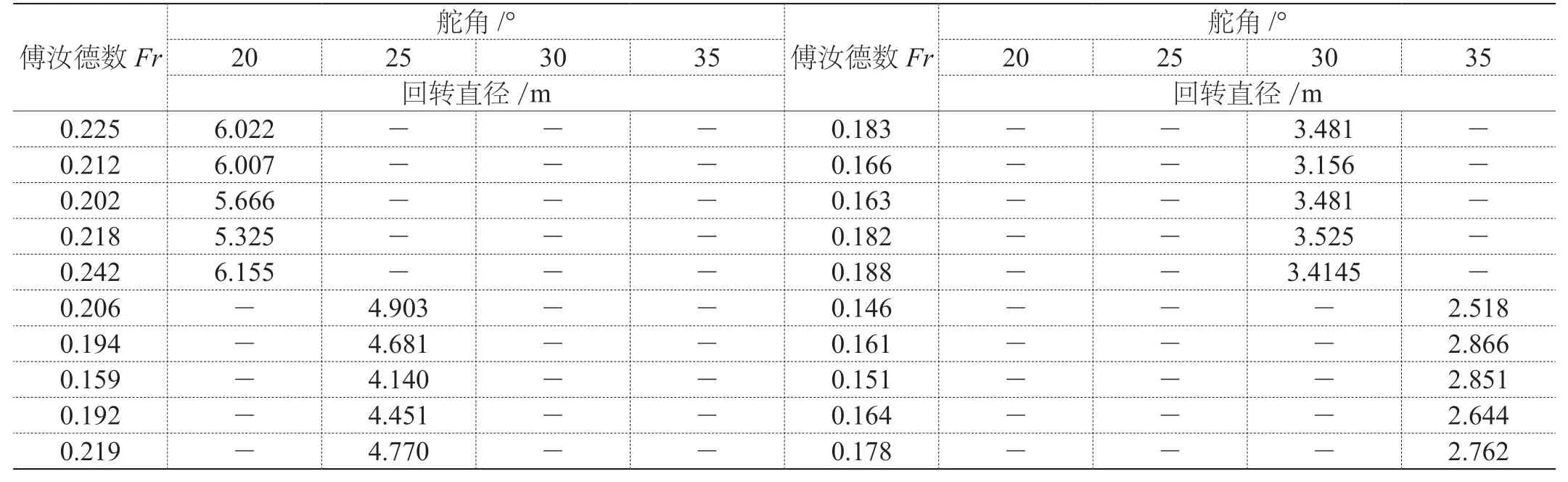
表2 回转实验数据记录表格

图3 回转系统辨识程序
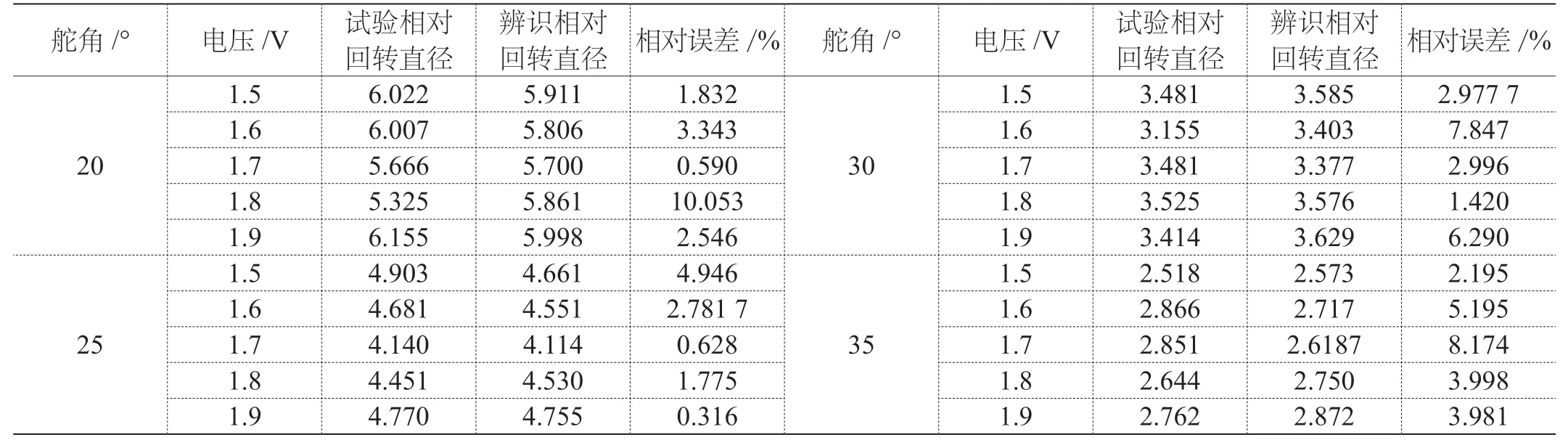
表3 回转试验辨识结果

表4 辨识所得参数
实验中,船模按照既定程序进行回转运动,MTI、DGPS、三维电子罗盘串口正常调用并采集数据,岸机正常接收DGPS、三维电子罗盘所采集的实时数据。实验结束后在PAC内部成功生成记录DGPS、三维电子罗盘数据的TXT文档。将回转运动系统辨识相关数据输入到回转性能系统辨识程序中,数据处理正常。通过辨识得到了回转性能相关参数,表达出了回转运动方程,辨识结果相对误差小。
所构建的船舶操纵性实时监测系统,数据采集系统运转正常,数据传输系统运转正常,数据分析系统运转正常,同时构建的船舶回转运动系统辨识数学模型能够用来研究船舶回转运动。
综上,判定船舶操纵性实时监测系统,对船模操纵性实时监测正常,船舶操纵性实时监测系统实验验证成功。
3 结论
该文构建了船舶操纵性实时监测硬件系统,以可编程自动控制器PAC作为核心控制器,导航系统由DGPS、三维电子罗盘组成,姿态测量系统由激光测距仪组成,数据传输系统采用数传电台,数据分析系统采用PC电脑。通过测试,该硬件监测系统符合该文所构建的船舶操纵性实时监测系统的要求。
同时,构建了船舶操纵性实时监测软件系统,建立了船舶操纵性数学模型,基于遗传算法确立了操纵性性能研究的系统辨识模型,并基于VB6.0改编了相应的系统辨识程序,编写了船模运动控制、数据传输程序以及各数据采集串口程序,设计了PAC执行程序界面。
对船舶操纵性实时监测系统成功进行了船模实验验证,该系统设计成功。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
新高考·高二数学(2022年3期)2022-04-29
中学生学习报(2022年16期)2022-04-16
科学与财富(2021年35期)2021-05-10
舰船科学技术(2021年12期)2021-03-29
中学数学杂志(初中版)(2016年5期)2016-11-01
中学数学杂志(初中版)(2016年5期)2016-11-01
小学生时代·大嘴英语(2014年6期)2014-11-04
航海(2014年4期)2014-08-28