基于融合定位的集装箱海运安全系统研究
2022-11-16 06:34陈宇微王嘉慧聂文鹏杜泽纹
电视技术 2022年10期
陈宇微,韩 锐,王嘉慧,聂文鹏,杜泽纹
(东北林业大学,黑龙江 哈尔滨 150040)
1 研究背景
随着世界经济全球化和一体化的不断发展,海运业在过去的十多年中获得了稳步的增长。全球航运网络正在形成,而集装箱运输由于具有安全、便利操作以及方便采用多式联运等特点,成为其中增长最为迅速的部分[1]。近年来,国际航运业的信息化是集装箱海运发展的主要趋势之一,其中,集装箱定位与信息传递问题的重要性日渐凸显。
对于重要物资的海上运输或在恶劣天气条件下海上航行时,为保障海运过程中集装箱的安全性以及定位信息传输的实时性,防止出现因箱体倾斜入海无法追踪而导致货物丢失的情况,亟需可以解决此类状况的集装箱海运安全系统。因此,研制一套能可靠定位与稳定传输集装箱坐标等信息的安全综合系统,具有重要意义。
2 设计原理
2.1 集装箱海运安全系统分析
通过对现有集装箱海运安全系统的分析,发现目前系统存在以下不足。
(1)在港口处,由人工完成对集装箱是否存在破损的检查,可能出现因人为疏忽导致未及时发现集装箱破损的情况[2]。
(2)现有以全球定位系统(Global Positioning System,GPS)技术为主的陆运集装箱监测系统存在系统成本高、保密性弱等缺点[3]。在海运途中,当装载重要物资的集装箱发生落水事故时,易出现无法及时寻找到集装箱并完成打捞工作,从而造成财产损失和危害环境的情况。
为解决以上不足,集装箱海运安全系统应满足如下要求。
在海运途中,采用融合定位技术提高集装箱的定位精度。同时,可将位置坐标实时上传至信息查询平台,供管理人员或普通用户查询集装箱信息。
当集装箱运抵港口时,由箱体检损装置自动对所有集装箱进行全面检查,并将检查结果上传至信息查询平台,提醒工作人员及时修复受损集装箱。
系统应具有信息汇总平台,以符合航运业信息化发展的趋势。
2.2 集装箱海运安全系统设计
2.2.1 系统功能设计
本文设计一种应用于集装箱海运的基于融合定位、图像识别以及射频识别(Radio Frequency Identification,RFID)技术的安全系统。系统主要包含电子标签与定位终端模块、港口检损模块以及信息查询模块。
2.2.1.1 电子标签与定位终端模块
电子标签与定位终端模块安装于集装箱外壁距顶板30 cm左右高处,包含RFID电子标签与定位终端两部分。
(1)RFID电子标签用于存储集装箱箱号、箱内产品等基本信息,可通过读写器进行读写。RFID电子标签与读写器之间通过耦合元件实现射频信号的空间(无接触)耦合;在耦合通道内,根据时序关系,实现能量的传递和数据交换[4]。
(2)定位终端由STM32单片机、MFRC模块及定位模块组成。其中,定位模块由GPS&北斗模块、SIM卡模块、捷联惯性导航(INS)模块及滴水检测模块组成。MFRC模块作为读写器读取RFID电子标签信息,以确定定位信息取自哪个集装箱。
定位模块中,系统通过SIM卡模块对载体所处位置信号进行判定:若返回值处于15~35区间内,则判定集装箱处于近海岸地区,采取卫星定位与基站定位融合定位方案;若返回值不在设定阈值范围内,则判定集装箱处于远海岸地区,采取卫星定位与惯性定位融合定位方案。数据融合的具体方式与可行性验证在章节2.1,2.2中详细描述。
完成集装箱所处区域的判定后,系统会通过滴水检测模块与惯性导航模块实时监测集装箱所处环境状态。若集装箱被水浸泡超过5 min,或集装箱任意轴向加速度超出安全范围(≤3g,参考实验结果得到),则判定为紧急状态,定位终端将每秒上传一次定位信息,避免发生集装箱落水后,因定位间隔时间较长、海上洋流造成集装箱漂远,不方便打捞。反之,若系统处于安全状态,终端将每小时上传一次定位信息,既能满足定位需求,又可以节省电量。定位模块的工作流程如图1所示。
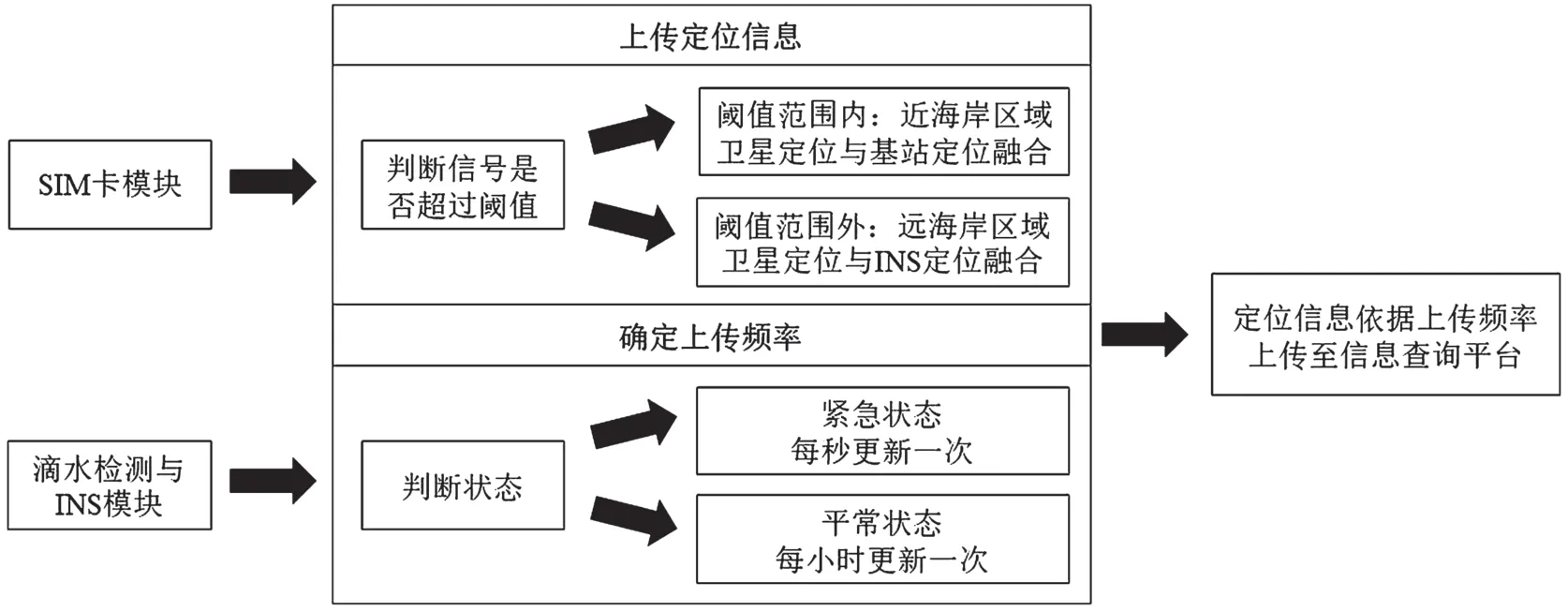
图1 定位模块工作流程
2.2.1.2 港口检损模块
本模块安装于岸边集装箱起重机抓斗处,包含港口读写终端和箱体检测装置两部分。
港口读写终端结构与MFRC模块相同,在抓斗完成对集装箱的抓取时,港口读写终端作为读写器读取RFID电子标签信息,并将集装箱基本信息录入信息查询平台,便于系统管理。
箱体检测装置由一个树莓派和四个摄像头组成。摄像头分布在抓斗的四角,并朝向集装箱。树莓派控制摄像头对完成抓取的集装箱进行实时拍照,并对照片进行分析。返回结果后,树莓派将无问题的照片删除,并将有问题的照片上传至信息查询平台,进行人工判断,提示工作人员及时处理。
2.2.1.3 信息查询模块
信息查询模块是一个自建的信息查询平台。本模块通过汇总电子标签与定位终端模块和港口检损模块采集的数据,形成一个数据管理平台。
平台主要面向两种操作用户:一类为平台管理人员,其可对平台所收集到的信息进行修改;另一类为普通用户,其可利用集装箱号查询该集装箱地理位置等信息。
三个模块之间通过5G网络进行信息传输,在信号不佳处可通过北斗短报文传输数据。
2.2.2 系统工作流程
海运出发前,通过RFID电子标签录入集装箱信息,并上传信息至平台。在海运途中,电子标签与定位终端模块将完成集装箱定位信息的采集,并将信息按照规定场景的频率上传至平台。集装箱运抵港口后,由港口检损模块对集装箱基本信息进行核验,并检测集装箱是否受损。若集装箱完好,则可继续执行运输任务;反之,模块将上传集装箱状态信息至平台,并通知管理人员提醒工作人员修复。修复好后由管理人员更新集装箱状态信息。用户可在平台进行数据查询。系统工作流程如图2所示。
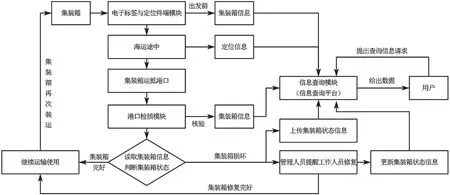
图2 集装箱海运安全系统工作流程
3 融合定位方式及检验
3.1 融合定位方式
本系统以卫星定位数据为基准,利用基站定位数据或INS数据通过卡尔曼滤波算法进行拟合,实现数据融合。卡尔曼滤波是一个不断地预测、修正的递推过程,由于其在求解时不需要存储大量的观测数据,并且当得到新的观测数据时可随时算得新的参数滤波值,便于实时地处理观测结果[5],因此本系统利用卡尔曼滤波对动态定位数据进行处理。
3.2 融合定位可行性验证
3.2.1 试验过程
使用无人机一架,携带气压计、GPS模块和INS模块(定位精度均为1 m,数据采样频率设为5 Hz)各一个,在100 s时间内螺旋上升40 m,螺旋半径为20 m。
在整个过程中,可利用气压计测量的气压数据分析出无人机的受力数据,从而通过积分求得速度数据;利用GPS模块得到GPS定位数据,利用INS模块得到INS数据。
3.2.2 试验分析
将无人机飞行过程中,利用气压计、GPS模块记录的数据以及两者经卡尔曼滤波处理后得到的数据共三组数据通过MATLAB软件绘制在同一个图像中,如图3所示。

图3 飞行轨迹数据标示图
由图3可得,对利用气压计经积分计算得到的速度数据和GPS模块得到的定位数据进行卡尔曼滤波处理后,所得定位参数的定位精度高于未处理前的定位参数,定位准确性得到大幅提升。
同理,将INS模块所得的无人机飞行加速度、GPS模块测得的定位数据以及两者经卡尔曼滤波处理后得到的数据共三组数据通过MATLAB软件绘制在同一个图像中,如图4所示。

图4 无人机位移标示图
由图4可得,若仅使用INS模块的数据进行定位,因INS模块无法稳定估计无人机速度,导致加速度积分误差不断累积,从而造成定位参数不收敛,无法准确检测无人机位置的情况。若将INS模块所得加速度数据与GPS模块测得的定位数据进行卡尔曼滤波处理,利用INS模块数据对GPS定位数据进行修正与增强,便能得到更精确的定位信息。
综上,单独由INS模块或GPS模块测得的定位数据均存在定位精度不足的问题,而利用卡尔曼滤波算法对GPS模块与INS模块所得数据进行数据融合处理后,便可提高定位精度,更好地实现在复杂天气或海况条件下对集装箱进行准确定位的目的。故本装置所述融合定位的方案可行。
4 创新特色
与现有集装箱海运安全系统相比,本系统有以下特色。
(1)本系统可以实时拍照、自动检损,分析集装箱是否存在残损情况,与现有的人工肉眼对集装箱进行检损和手动上传破损照片或视频相比,提高了检查的精度与效率。
(2)本系统应用融合定位模式,相比于单定位模式,能够有效提高定位精度。
(3)本系统建立了信息查询平台,实现了集装箱信息智能汇总与查询。
(4)本系统终端上的传感器模块,能够依据集装箱是否处于紧急状态,调整定位与信息上传频率,可以在保障安全的同时节省电量。
5 结 语
本系统目前设计以服务集装箱海洋运输领域为主,在陆路运输方面依然可以适用。随着人们对集装箱海运安全系统认识的不断加深以及本项目技术的不断改进和完善,它必将在未来的集装箱远洋运输中得到不断的升级和更广的应用。
猜你喜欢
橡胶科技(2022年10期)2022-11-03
北京航空航天大学学报(2022年8期)2022-08-31
北京航空航天大学学报(2021年7期)2021-08-13
进出口经理人(2021年8期)2021-02-12
现代电子技术(2019年18期)2019-09-23
电子制作(2019年23期)2019-02-23
北京航空航天大学学报(2017年9期)2017-12-18
航运交易公报(2016年43期)2017-03-31
航运交易公报(2016年43期)2017-03-31
航运交易公报(2016年42期)2017-02-28