
基于状态反馈精确线性化Buck变换器的微分平坦控制
2022-11-28 11:54皇金锋李慧慧
工程科学与技术 2022年6期
皇金锋,李慧慧*,谢 锋
(1.陕西理工大学 电气工程学院,陕西 汉中 723001;2.国网西安供电公司,陕西 西安 710032)
随着电力电子技术的日趋成熟,功率开关变换器被广泛用于航空航天电源、新能源电能变换及直流驱动器等系统[1–3]。在这些系统中,需要能输出可靠稳定电压的DC–DC开关变换器,其中,具有降压功能的Buck变换器被广泛使用[4–5]。但Buck变换器本身是一个时变、强非线性电路,各种不确定性因素,如输入电压和输出电流的突变、电路参数的摄动等都会在一定程度上影响变换器的暂态和稳态性能,因此寻求性能优良的控制策略具有重要意义[6–7]。
很多专家学者针对DC–DC变换器的控制策略进行了深入研究,目前主要集中在线性控制和非线性控制两方面。线性控制中,具有代表性的是传统PI、PID等控制。其基本思想是将系统输出电压与期望电压对比形成偏差信号,再将偏差信号进行比例、积分等组合处理,获得控制信号。线性控制结构简单,控制器参数容易获取。但随着工业科学技术的不断发展,传统PI、PID等控制在工程使用方面的局限性显现出来,仅根据输出电压偏差信号获得控制信号使得系统稳定性不高,动态调节性差[8]。为了提高变换器的抗干扰能力,许多非线性控制,如单周期控制[9]、自适应控制[10]、滑模控制[11]、模型预测控制[12]和微分平坦控制[13]等被广泛研究。其中,微分平坦控制由于具有控制效果优良、控制结构简单、易于编程实现、平坦输出量快速等优点而被广泛应用于各工业场合[14]。徐良材等[13]提出一种双环微分平坦控制策略,以提高系统在内外扰动作用下的稳定性,其研究结果表明,与传统PI控制相比,平坦控制在抵抗系统参数摄动与不匹配、输入电压突变、输出电流突变,以及燃料电池应用上均具有明显的优势,该控制方法相比其他非线性控制方法更加简单。Mehrasa等[14]将微分平坦理论应用于模块化多电平变换器,其将瞬时有功和无功功率值作为微分平坦输出,建立了基于微分平坦输出的MMC动态模型,实现了微分平坦控制器在稳态和瞬态条件下通过管理有功和无功功率来维持MMC电流和电压的稳定能力。以上文献表明微分平坦控制具有良好的控制效果,上述控制策略在一定程度上提高了变换器的稳态和暂态性能,但是当变换器参数存在摄动或存在外界干扰时系统的鲁棒性还需要进一步提升。
状态反馈线性化的理论基础是微分几何理论,微分几何方法可将能达子流形与能控李导数结合起来,合理选取输出函数,可使系统实现状态反馈精确线性化,从而将非线性系统转化为能控线性系统。但也存在一些缺点,如反馈线性化后的模型对于系统参数有较高的要求,需要再通过与各类线性或非线性控制方法结合,得到更为优良的控制效果。帅定新[15]、邓卫华[16]等将状态反馈精确线性化与二次型最优控制结合应用于Buck变换器,其结果证明,该控制方法与传统PI控制相比,控制精度更高,动态响应更快,但权矩阵的选取是通过经验试凑法,没有明确的物理意义。张衡[17]、王宝华[18]等将精确线性化与滑模控制结合应用于Boost变换器,显著提高了系统的暂态性能,但滑模系数选取复杂,不易工程实现。为此,本文以电感电流连续导电模式Buck变换器为例,提出基于状态反馈精确线性化的微分平坦控制方法。利用精确反馈线性化将原非线性Buck变换器系统转换为线性系统,以简化微分平坦控制器的设计,将扰动观测器嵌入前馈控制器中,提高系统鲁棒性。同时,为了定量分析出变换器参数变化对系统特征值的影响程度及趋势,应用灵敏度理论进行了进一步分析。最后,搭建仿真与实验平台,验证了理论分析的正确性,本文所提控制方法可推广至其他Buck类变换器。
1 状态反馈精确线性化分析
1.1 仿射非线性模型分析
Buck变换器的电路拓扑如图1所示。
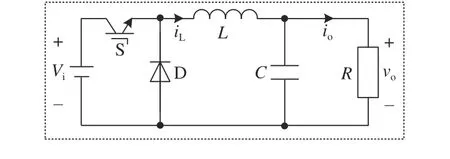
图1 Buck变换器Fig.1 Buck converter
图1中,Vi为输入电压源,S为功率开关管,D为功率二极管,iL为流过电感L的电流,C为电容,io为流过负载R的电流,vo为输出电压。
根据状态空间平均法建立变换器状态方程为:

式中,u为S的占空比。
令系统状态变量x=[x1,x2]=[iL,vo],输出变量y=h(x)=Vref–x2,其中,Vref为输出电压参考值,根据文献[14]可得单输入单输出变换器的仿射非线性控制系统模型为:

1.2 精确线性化分析
1.2.1 精确线性化条件
若式(2)满足以下限定条件[19]:
1)矩阵D=[g(x0),adfg(x0),g(x0),···,g(x0)]满秩,其中,adf为李导数。
2)对于任意的τ1、τ2,其李括号[τ1,τ2] ∈D,即在邻域D0对合分布。
则被控对象就可利用合适的坐标变换实现精确线性化。
根据式(2)计算李括号以验证变换器的精确线性化条件:


分析式(4)可知,该系统相对阶r取值为2,且等于状态变量维数n,因此Buck变换器可实现状态反馈精确线性化。
1.2.2 状态反馈控制率
对式(2)定义如下坐标系:

将式(5)代入式(2)可得系统状态反馈控制率为:

由以上分析可得图2所示的变换器状态反馈精确线性的控制框图[20]。
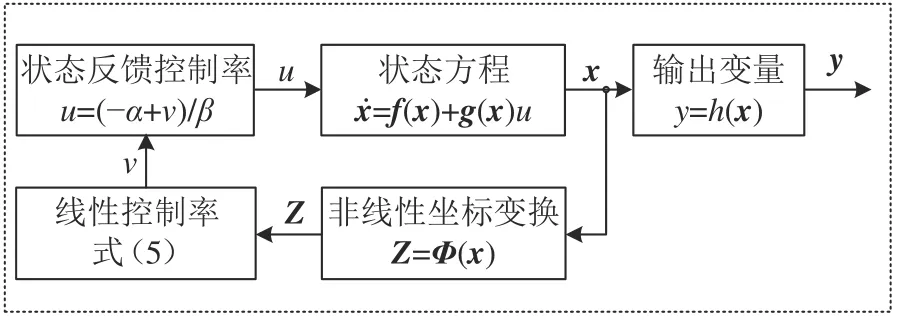
图2 状态反馈精确线性化控制框图Fig.2 State feedback precise linearization control block diagram
分析式(3)可知,矩阵D满秩,满足精确线性化的第1个条件;g(x)、adfg(x)均与x无关,可视为恒向量场,因此,D为对合分布,Buck变换器可实现精确线性化。
此外,根据式(2)推导以下李导数以确定系统相对阶:
2 微分平坦控制器设计
由第1节分析可知,Buck变换器可实现状态反馈精确线性化,即原非线性系统可转化为能控线性系统。本节将状态反馈精确线性化与微分平坦控制结合设计系统控制器,控制系统结构框图如图3所示。

图3 Buck变换器控制结构图Fig.3 Control structure diagram of the Buck converter
图3中,该控制系统包含3部分,即:前馈控制器,反馈补偿器及扰动观测器。其中,前馈控制器中包含的微分项保证了变换器系统的快速性,反馈补偿器中包含的偏差项保证了变换器系统的准确性;扰动观测器将系统输出电流作为外部扰动进行实时观测,并将观测值嵌入前馈控制中,以提高系统鲁棒性。
2.1 微分平坦控制理论
微分平坦控制理论是在20世纪由法国人Fliess提出的,基本含义是能将系统的状态跟踪轨迹x与控制率u完整描述[21]。微分平坦控制主要包含前馈控制量生成和误差反馈补偿两部分,前者包含的微分项保证了变换器系统的快速性,后者包含的误差反馈项保证了变换器系统的准确性。下面进行详细分析。
假设存在如下所示n阶非线性系统:

且该非线性系统的平坦输出量y满足式(8),那么称该系统为微分平坦系统。

式中,i与j为微分阶数,φ与γ均为标量函数。
基于微分平坦控制理论的平坦控制框图如图4所示[21]。图4中,yref为平坦输出量的期望值,y为平坦输出量的实际值。

图4 微分平坦系统控制框图Fig.4 Differential flat system control box diagram
2.2 前馈控制器设计
由文献[21]可知,Buck变换器系统满足微分平坦控制理论的条件,因此,选取vo为平坦输出量,iL为状态跟踪轨迹,v为控制率,于是可得:

将式(9)代入式(1)可得:
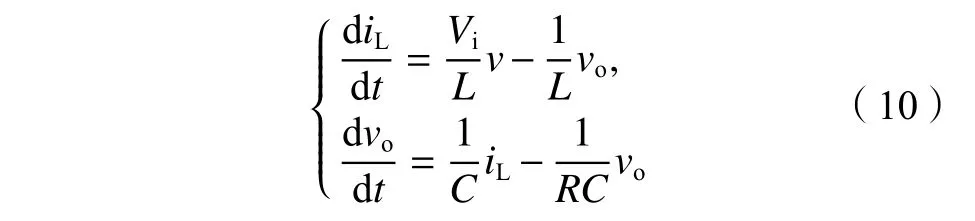
化简式(10)可得:

将式(11)代入式(6)可得系统前馈控制率u1为:

2.3 反馈补偿器设计
实际系统由于未建模部分的影响和外部扰动的存在,实际平坦输出与期望平坦输出间存在偏差,可引入偏差的积分及其复合控制来消除,因此定义反馈控制率u2为:

联立式(12)和(13)可得系统的控制率u为:
2.4 扰动观测器设计
将式(1)转化为如下形式:
根据式(15)设计的扰动观测器为:

矩阵,l(x)为增益矩阵。
根据式(16)设计的q(x)为:

由式(17)可得l(x)为:

定义扰动观测器的观测误差ed为:

联立式(15)、(16)和(19)可得扰动量观测误差方程为:

分析式(20)可知,当l(x)g2(x)>0时,观测器收敛。基于系统收敛的条件,可设计观测器反馈增益为l1=0,l2<0。在设计l2时,应避免参数选取过大而导致系统控制困难,从而出现噪声饱和等现象[22–23]。
3 稳定性分析
3.1 系统特征值
根据式(1)可得Buck变换器闭环系统的雅克比矩阵J为:
式(21)描述的雅克比矩阵的特征方程为:

式中,I为单位矩阵,λ为闭环特征值。
将式(21)代入式(22)得到系统闭环特征方程为:
分析式(23)可知,工作于电感电流连续导电模式的Buck变换器是3阶系统。根据劳斯–赫尔维兹判据即可得其稳定性范围:

分析式(24)可知,实际系统易满足各项系数大于零的条件,因此着重分析ab–c>0的条件。
化简式(24)中ab–c>0可得:

分析式(25)可知,当实际系统参数满足各项系数大于零时,ki存在稳定上界。
3.2 特征值灵敏度分析
为了进一步分析出变换器参数变化时对系统特征值的影响程度及趋势,这里应用灵敏度理论进行研究。特征值灵敏度[24]的表达式为:

式中:pi为J的右特征向量;qi为J的左特征向量;特征值灵敏度为复数,其中,σ为其实部,ω为其虚部。σ的绝对值大小反映了参数变化对系统稳定性的影响程度,当σ大于零时,减小该参数有利于提高系统的稳定性;否则,反之。
给定一组Buck变换器参数:L=1 mH,C=50 µF,Vi=20 V,R=20 Ω,K1=0.83,K2=4.75。根据式(25)可得ki的取值范围:0ki<79 538.9,这里取ki=17 219。根据式(26)可计算出Buck变换器参数对系统特征值灵敏度的结果如表1所示。
分析表1可知:L对λ1、λ2和λ3的灵敏度的实部均大于零,说明减小L可提高系统稳定性;C对λ1、λ2的灵敏度的实部小于零,对λ3的灵敏度的实部大于零,且对λ1、λ2的灵敏度实部绝对值大于对λ3的灵敏度实部绝对值,说明增大C可提高系统稳定性;K1对λ1、λ2和λ3的灵敏度的实部均小于零,说明增大K1可提高系统稳定性;K2对λ1、λ2和λ3的灵敏度的实部均大于零,说明减小K2可提高系统稳定性;ki对λ1、λ2和λ3的灵敏度的实部均过小,说明ki对系统稳定性的影响可忽略。因此,相较于控制器参数而言,电路参数对系统稳定性影响程度更大,所以这里着重分析电路参数变化时对系统稳定性的影响程度及趋势。

表1 参数对特征值的灵敏度Tab.1 Sensitivity of the parameters to the eigenvalues
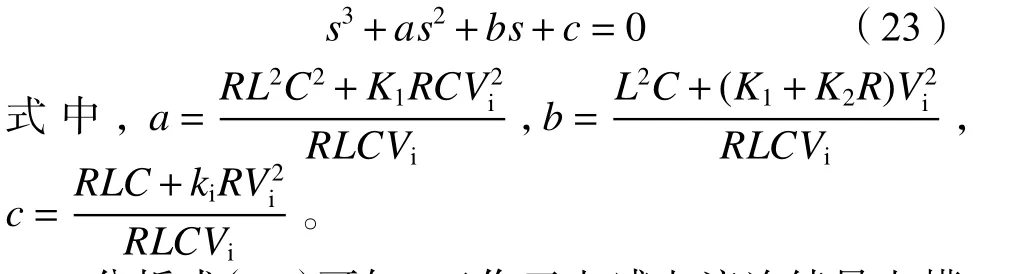
Buck变换器的参数设计需要考虑电感纹波电流、电容纹波电压、效率、体积、功率密度、暂态性能等因素,通常取电感L=(1.2~1.5)Lmin,C=(1.5~2)Cmin来满足系统要求;而在实际系统中,电感与电容均不能选取过大,否则,既会降低系统效率,又不符合电源设计的要求[25]。综合考虑,本文对满足系统要求范围内的电感(L∈[200 µH 1 mH])与电容(C∈[50 µF 90 µF])进行分析。减小电感L的取值,增大电容C的取值,得到系统特征值的变化趋势如图5所示。
图5 电路参数改变时系统特征值的变化趋势Fig.5 Variation trend of system eigenvalues when circuit parameters change
分析图5(a)可知,当电感L∈[200 µH 1 mH]时,减小电感L,系统特征值均向着复平面的左半部分移动,系统稳定性增强。分析图5(b)可知:当电容C∈[50 µF 90 µF]时,系统特征值λ3最靠近虚轴,因此,λ3是系统的主导极点,系统的暂态性能主要取决于λ3。并且,λ3向复平面左半部分移动的速度明显快于λ1、λ2向右移动的速度,因此,增大电容C可以提高系统稳定性及暂态性能。
4 仿真与实验分析
为了验证所提控制方法的有效性,搭建仿真和实验平台,其中Buck变换器参数如表2所示;同时,将本文控制方法与传统PI控制效果进行对比分析。控制器选择STM32F103,功率开关管选择IRF640NPBF,功率二极管选择FQPF12N60C。
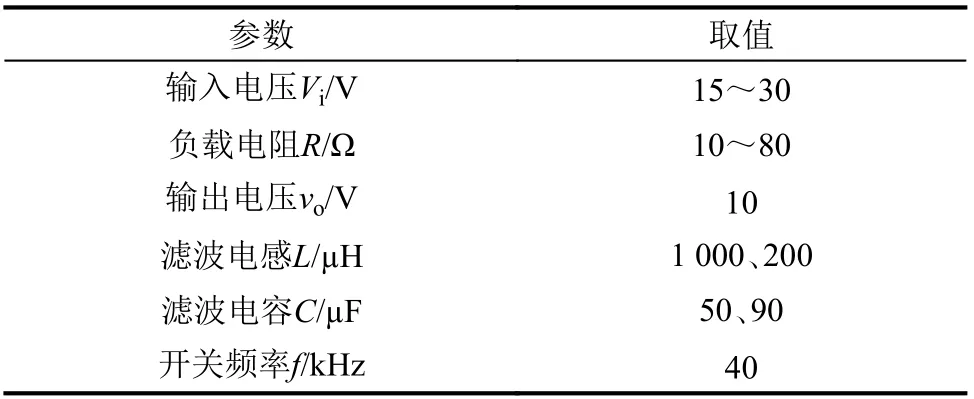
表2 Buck变换器电路参数Tab.2 Buck converter circuit parameters
4.1 仿真验证
4.1.1 扰动观测器增益选取过程
搭建变换器实验平台前,需要先选择合适的扰动观测器增益,由第2.4节可知观测器反馈增益设计为l1=0,l2<0。于是在相同的负载电阻扰动下,依次设置l2为0、–0.1、–0.2和–0.3,仿真结果如图6所示。其中,l2=0是变换器未引入扰动观测器的结果。
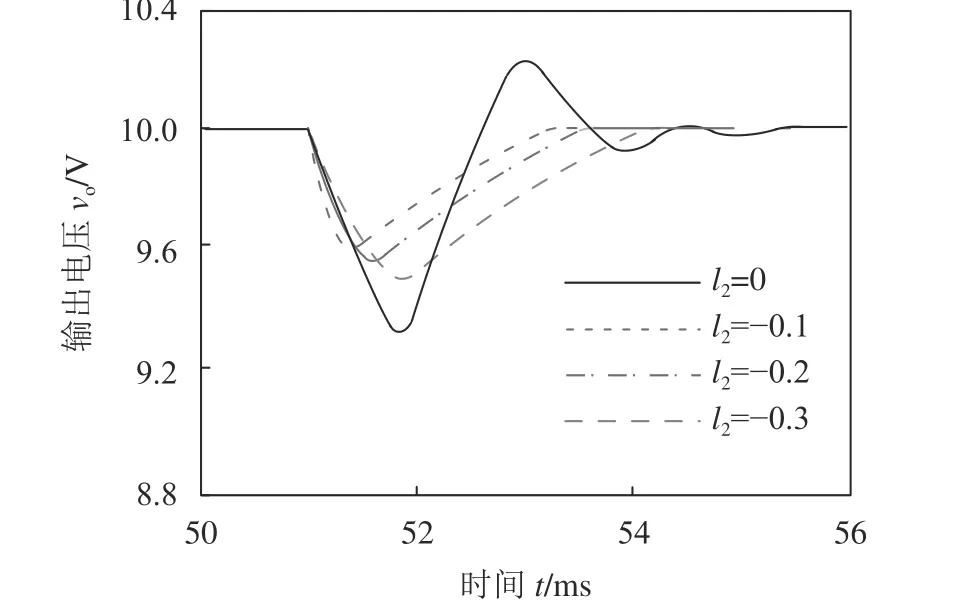
图6 扰动观测器增益选取过程Fig.6 Perturbation observer gain selection process
由图6可知:变换器在51 ms时受到扰动后,历时4.5 ms趋于稳定,超调电压为0.7 V;此外,当扰动观测器增益的绝对值越大,输出电压的动态调节越差,综合考虑,变换器的扰动观测器增益选为l1=0,l2=–0.1。
4.1.2 抗输入电压、输出电流突变测试
在电力电子仿真软件中,对Buck变换器分别搭建本文所提控制与传统PI控制的电路,使输入电压Vi和输出电流io分别在15~30 V之间和250~500 mA之间突变,仿真结果如图7所示。
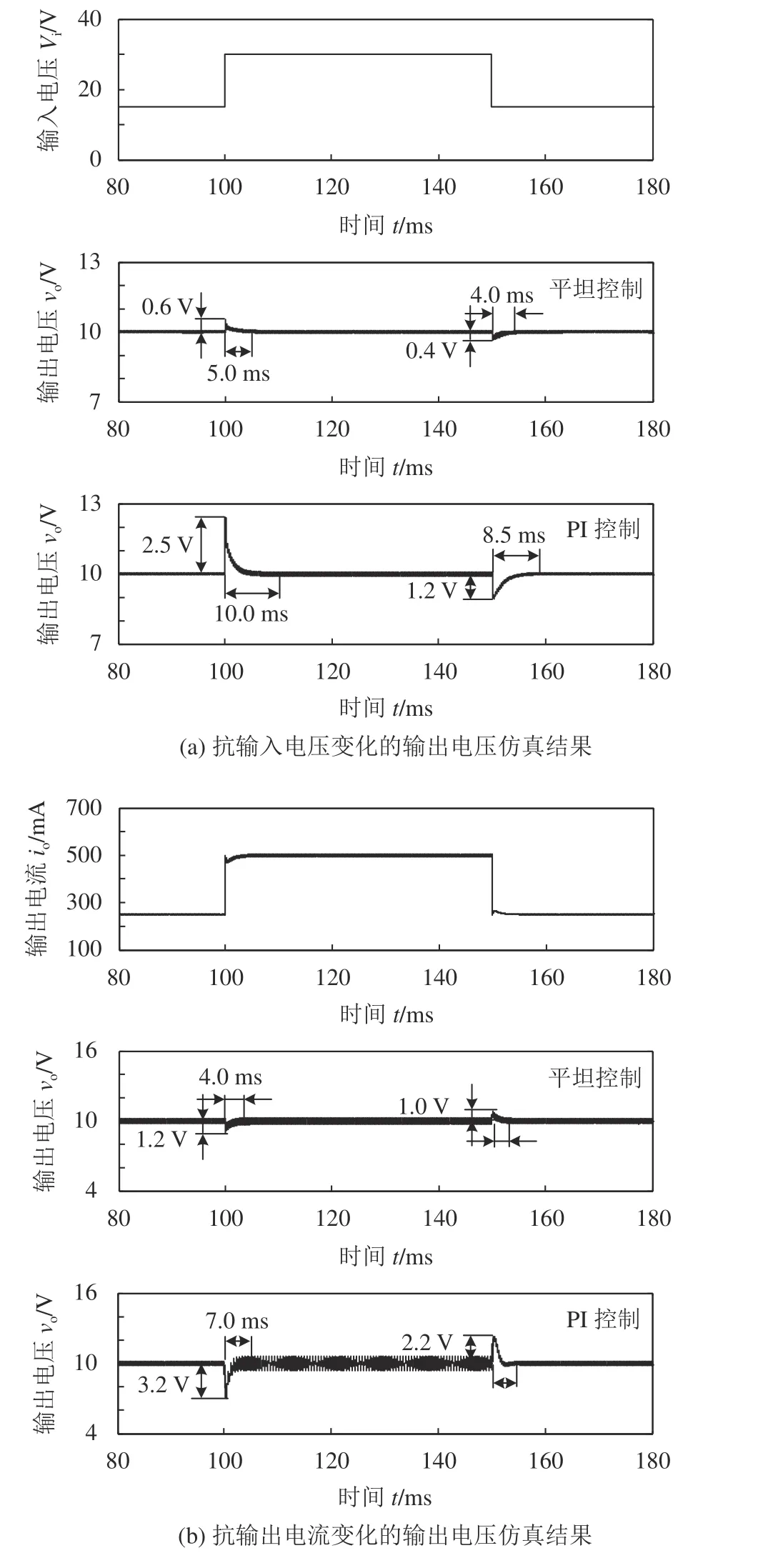
图7 仿真对比结果Fig.7 Simulation comparison results
分析图7(a)可知:当Vi由15 V突增至30 V时,PI控制Buck变换器的调节时间为10.0 ms,电压超调量为2.5 V;平坦控制Buck变换器的调节时间为5.0 ms,电压超调量为0.6 V。当Vi由30 V突减至15 V时,PI控制Buck变换器的调节时间为8.5 ms,电压超调量为1.2 V;平坦控制Buck变换器的调节时间为4.0 ms,电压超调量为0.4 V。
分析图7(b)可知:当io由250 mA突增至500 mA时,PI控制Buck变换器的调节时间为7.0 ms,电压超调量为3.2 V;平坦控制Buck变换器的调节时间为4.0 ms,电压超调量为1.2 V。当io由500 mA突减至250 mA时,PI控制Buck变换器的调节时间为6.5 ms,电压超调量为2.2 V;平坦控制Buck变换器的调节时间为3.0 ms,电压超调量为1.0 V。
4.2 实验验证
4.2.1 抗输入电压、输出电流扰动的实验验证
系统稳定运行时,使Buck变换器输入电压Vi由15 V突变至30 V,输出电流io由500 mA突变至250 mA,实验结果如图8和9所示。其中,“→”表示突变。
分析图8可知:当输入电压由15 V突增至30 V时,PI控制Buck变换器历时12.0 ms趋于稳定,超调电压为3.0 V;平坦控制Buck变换器历时6.0 ms趋于稳定,超调电压为2.0 V。

图8 输入电压扰动的实验结果Fig.8 Experimental results of input voltage disturbance
分析图9可知:当输出电流由500 mA突减至250 mA时,PI控制Buck变换器历时6.0 ms趋于稳定,超调电压为3.5 V;平坦控制历时3.0 ms趋于稳定,超调电压为2.5 V。
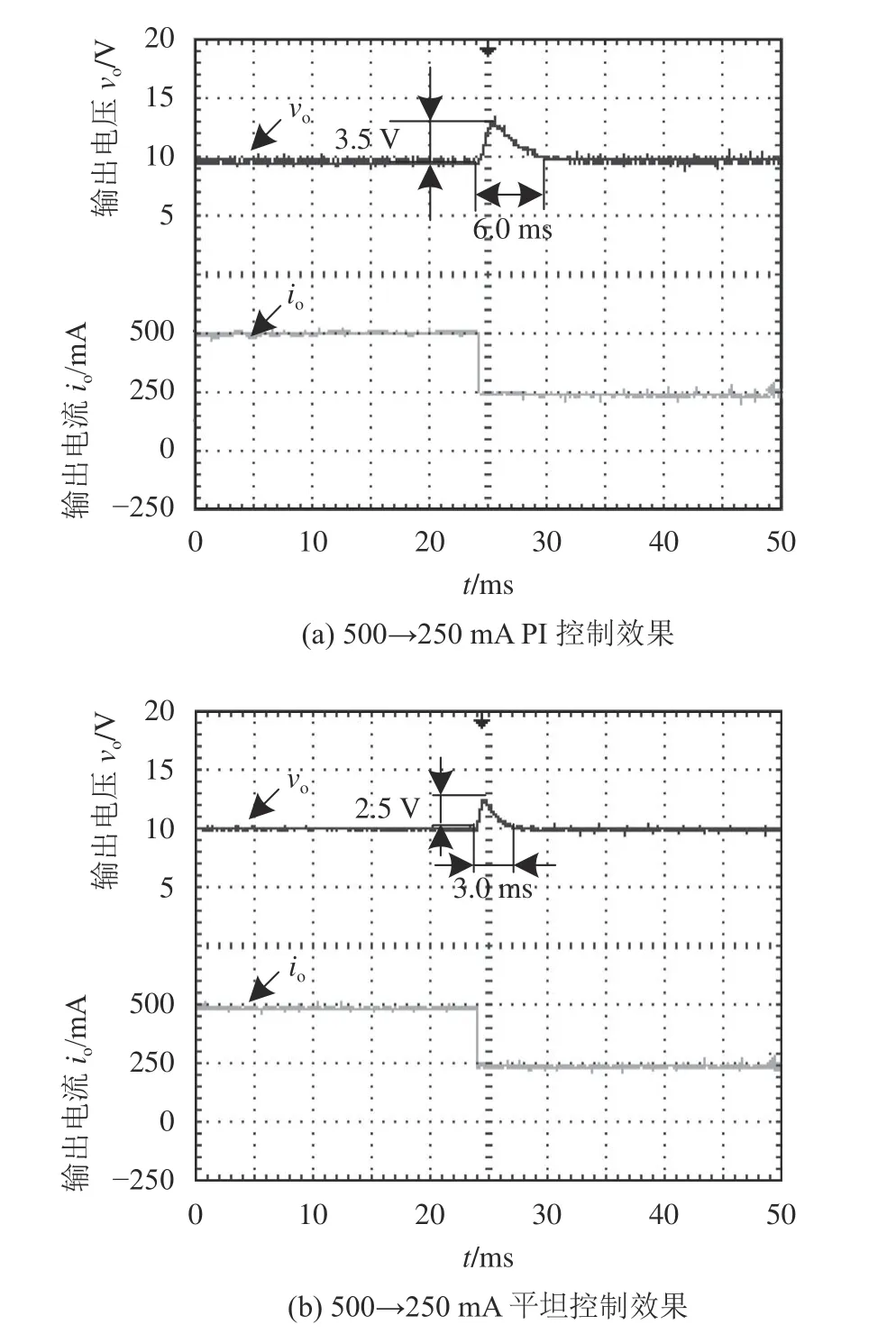
图9 输出电流扰动的实验结果Fig.9 Experimental results of output current disturbance
表3给出了在各种不同工况的扰动条件下两种控制方法的性能对比情况。
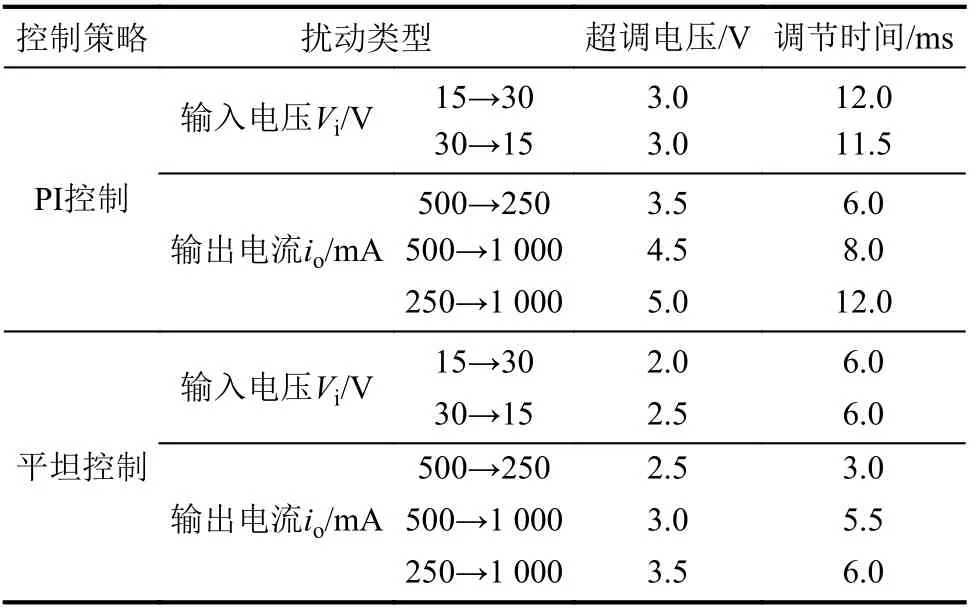
表3 平坦控制与PI控制性能对比Tab.3 Performance comparison between flat control and PI control
分析表3可知,与PI控制方法相比,平坦控制Buck变换器的超调电压明显减小,在发生输入电压和输出电流突变的情况下,有效提高了系统暂态响应速度。
4.2.2 电路参数灵敏度验证
由第3.2节分析可知,减小电感L、增大电容C有利于提高系统的稳定性及暂态性能,为了验证理论分析的正确性,在本文平坦控制方法下,将电感L减小至200 µH,电容C增大至90 µF,进行实验。
保持输出电压vo=10 V,使输入电压Vi从15 V突增至30 V,输出电流io从500 mA突减至250 mA,输出电流io从250 mA突增至500 mA,实验结果如图10所示。
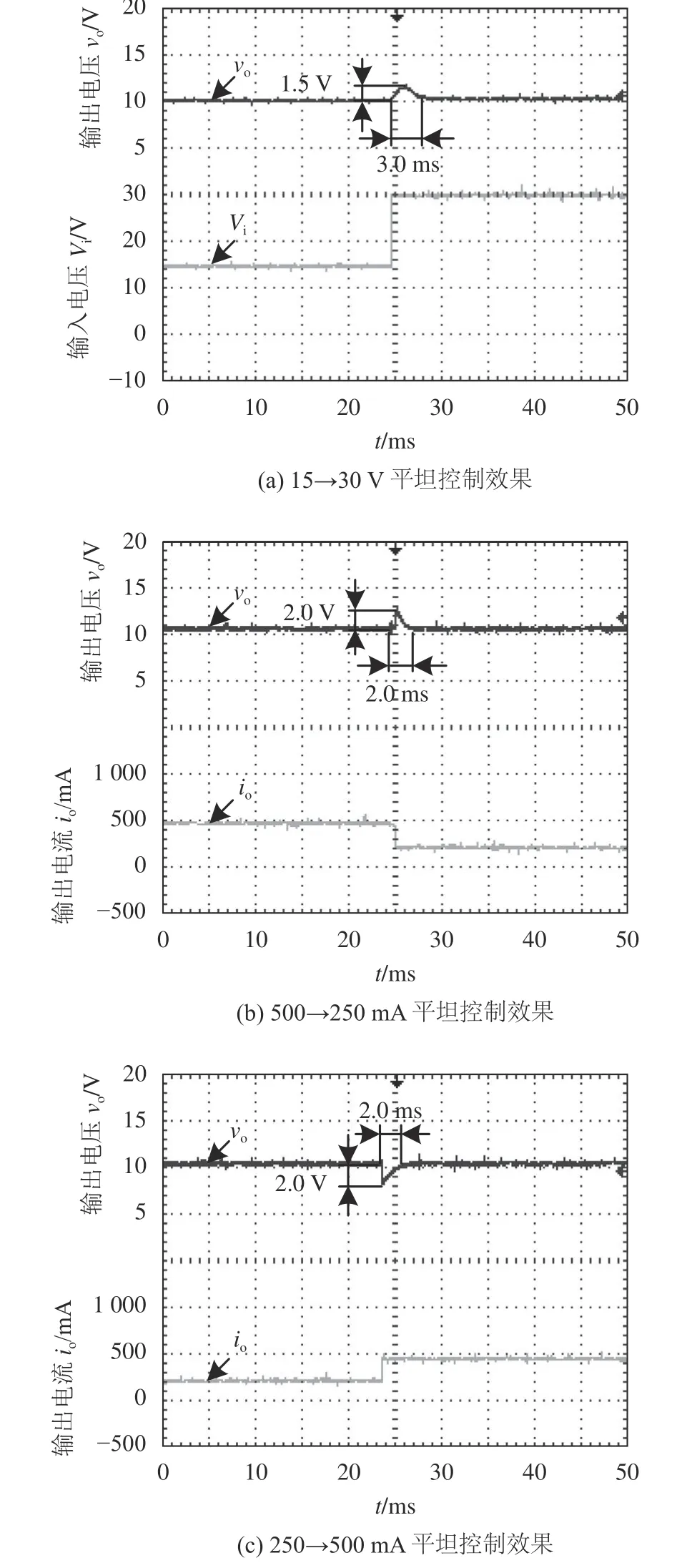
图10 参数改变后扰动的实验结果Fig.10 Experiments of the experiment after the parameter change
分析图10(a)可知,Vi由15 V突增至30 V时,平坦控制Buck变换器历时3.0 ms趋于稳定,超调电压为1.5 V;分析图10(b)可知,io由500 mA突减至250 mA时,平坦控制Buck变换器历时2.0 ms趋于稳定,超调电压为2.0 V;分析图10(c)可知,io由250 mA突增至500 mA时,平坦控制Buck变换器历时2.0 ms趋于稳定,超调电压为2.0 V。与图8和9对比可知,减小电感L、增大电容C提高了系统稳定性及暂态性能,验证了理论分析的正确性。
5 结 论
以工作于电感电流连续导电模式Buck变换器为例,提出一种基于状态反馈精确线性化的微分平坦控制方法。结论如下:
1) 建立了变换器的状态反馈精确线性化模型,实现了系统的线性化。基于此,设计了系统前馈控制器,并结合扰动观测器实现对输出电流的补偿,提高了系统对外部干扰的鲁棒性;设计了误差反馈补偿器,消除了系统的静态误差。与传统PI控制方法相比,本文控制方法显著提高了系统抗干扰能力及暂态响应速度。
2) 相较于控制器参数而言,电路参数是影响系统稳定性的重要因素。减小电感、增大电容有利于提高系统稳定性及暂态性能。
3) 本文所提控制方法具有算法简单、控制系统性能良好、编程易于实现等优点,可推广至其他工业应用场合。
下一步研究工作是:将基于精确线性化的微分平坦控制方法应用于电感电流断续模式Buck变换器,使得该变换器可工作在宽输入及宽负载范围,同时进一步体现该控制方法的工程实用价值。
猜你喜欢
数学物理学报(2021年2期)2021-06-09
数学物理学报(2021年2期)2021-06-09
数学年刊A辑(中文版)(2021年4期)2021-02-12
防爆电机(2020年4期)2020-12-14
北京航空航天大学学报(2020年10期)2020-11-14
中等数学(2020年2期)2020-08-24
数学物理学报(2019年5期)2019-11-29
江西建材(2018年3期)2018-03-21
北京航空航天大学学报(2017年6期)2017-11-23
北京航空航天大学学报(2016年7期)2016-11-16
