
光电倍增管时间测量误差补偿方法研究*
2022-12-05 11:13王翀党文斌朱炳利杨凯3杨嘉皓韩江浩
物理学报 2022年22期
王翀 党文斌† 朱炳利 杨凯3) 杨嘉皓 韩江浩
1)(西安邮电大学,电子工程学院,西安 710121)
2)(中国科学院西安光学精密机械研究所,中国科学院超快诊断技术重点实验室,西安 710119)
3)(中国科学院大学,北京 100049)
目前广泛使用的基于微通道板的光电倍增管,其时间分辨率受到光电子信号在各部分渡越时间限制,为光电子信号的时间信息测量带来一定程度的影响.对影响光电倍增管时间分辨率的参数进行分析,针对信号在阳极上的时间测量误差进行具体研究,确定由光电子信号在阳极位置上的差异是造成信号时间测量误差的重要因素,提出了一种简单且行之有效的误差补偿方法.采用延迟线阳极获取光电子信号的位置信息,将位置信息转化为该位置传输至电极端口的时间信息,通过这一时间信息对光电子信号的时间测量误差进行弥补.实验结果表明,该误差补偿方法能有效提升光电子信号的时间测量精度,为提高基于微通道板的光电倍增管时间分辨率提供解决思路和理论依据.
1 引言
随着激光、荧光探针标记和成像技术不断发展,衍生出多个学科,如荧光寿命成像[1]、荧光相关谱以及单光子荧光光谱等.时间相关单光子计数(time-correlated single photo counting,TCSPC)技术的探测灵敏度很高[2−4],且具有皮秒量级的分辨率,已成为荧光寿命成像和单分子荧光光谱相关工作的主要技术手段.目前,测量技术愈加成熟,而TCSPC 技术也发展迅速,获得了很多优秀成果,单就其信号采集时间来说,相较于早期阶段就缩短了近100 倍.
TCSPC 系统主要由单光子探测器、恒比鉴别器(constant-fraction discriminator,CFD)、时间数字模块(time-to-digital conversion,TDC)以及存储器等部分组成.时间分辨率是其主要指标之一,其总体时间分辨率分别由探测器、CFD 以及TDC 各自的时间分辨率共同决定[5,6].CFD和TDC的时间分辨率在TCSPC 系统中已经达到非常高的精度.然而,探测器时间分辨率的影响因素较多,虽然已达到皮秒量级,但仍有提升的空间.
2 时间分辨影响因素研究
2.1 影响TCSPC 系统时间分辨的因素
在时间相关单光子计数系统研究工作中,时间分辨是一个需要重点考虑的因素,其精度的提升会给后续单光子计数带来便利.TCSPC 系统的主要装置一般包括探测器(多使用PMT)[7−9]、CFD、TDC 以及存储器,其系统结构如图1 所示.探测器重复输出光信号产生单光子脉冲;CFD 采用恒定比例触发信号的方式消除探测器输出脉冲的幅度抖动,从而避免脉冲高度所引起的定时抖动;TDC将光电信号转变为数字信号,对光电子的飞行时间进行测量.TDC的输出作为测量数据存储器的地址,随着写入地址存储单元数据量的增加,就建立起了随时间变化的光子分布.
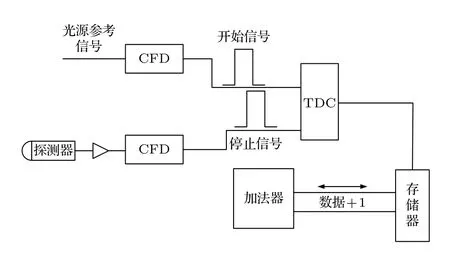
图1 TCSPC 系统装置Fig.1.TCSPC system device.
在光电探测器中,阴极具有反射式阴极和透射式阴极两种结构,反射式阴极结构的阴极是直接镀制在微通道板的输入面,光信号激发的光电子直接进入MCP 中倍增输出[10−12],因而探测器的极限时间分辨率受到微通道板渡越时间弥散的制约.
时间分辨率是系统能够分辨的最小时间间隔,根据电子学理论,影响TCSPC 系统时间分辨率的因素取决于物理时间分辨率Tphy和技术时间分辨率Ttec,因而系统的整体时间分辨率可表示为

其中,物理时间分辨率Tphy可以表明电子经由系统各部分后,渡越时间弥散的整体效果,而渡越时间弥散主要由不可避免的电子空间电荷效应引起.技术时间分辨率Ttec代表外在因素对系统时间分辨率的影响[13].
对于时间相关单光子计数系统,根据系统各部分组成原理,其物理时间分辨率可表示为

其中Tphy_TCSPC代表TCSPC 系统的物理时间分辨率,ΔtDETEC代表探测器时间分辨率,ΔtCFD代表恒比鉴别器的时间分辨率,ΔtTDC代表时间测量模块的时间分辨率.目前CFD和TDC的时间分辨率已达到非常高的精度,影响系统整体时间分辨率精度的最主要因素是探测器.
2.2 位置引起时间测量误差
光电子信号在MCP-PMT 中的渡越过程如图2所示,信号由阴极向MCP 传输,当光电信号进入MCP 之后,光电子在外电场作用下加速的同时并倍增,探测器时间分辨率同样受微通道板渡越时间弥散制约.光电子结束在微通道板内的倍增过程,向探测器阳极传输,阳极接收到光电子信号的瞬间即为光电子到达时间.目前所涉及到的这一过程的相关研究指出,电子渡越时间弥散为60 ps 左右[14−16].除了上部分的电子渡越时间,还有光电子信号在阳极上传输至电极位置的渡越时间,该时间同样是影响MCP-PMT 时间分辨率的不可忽略的因素.
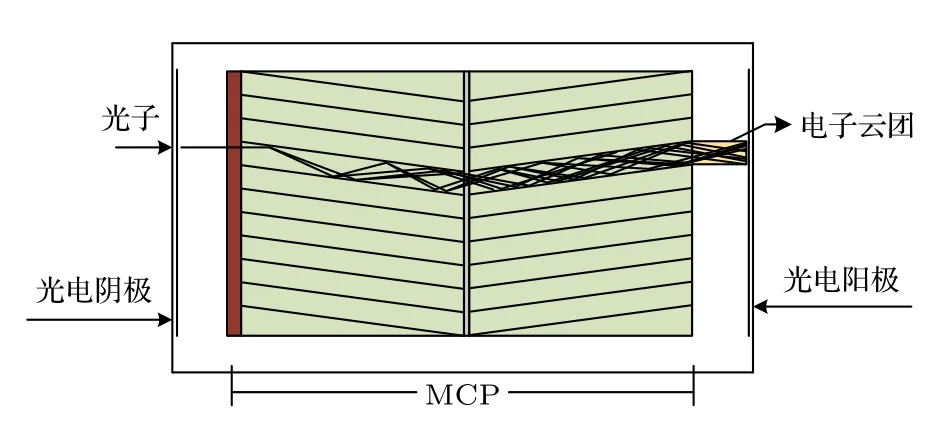
图2 光电子在MCP-PMT 中渡越示意图Fig.2.Schematic diagram of photoelectron transition in MCP-PMT.
光电子信号到达阳极的时刻,被视为信号到达时间,事实上,这一时刻往往有所滞后,因为光电子信号到达阳极之后,仍需要从到达位置向电极进行传输,这段过程造成了测量到达时间比实际到达时间滞后.一个明显的问题是当前后两束时间间隔较小,并且撞击在阳极不同位置上的光电子信号,第1 束电子信号到达阳极的位置距离电极较远,第2 束电子信号靠近电极并且传输至电极处所需要的时间小于两束电子信号的时间间隔时,后端电子学将会首先采集到第2 束电子信号,这一情况与实际并不相符.
假设阳极采用φ25 规格的结构,如图3 所示,当第一束光电子信号a 撞击在阳极的边缘,时间间隔为5 ps的第2 束光电子信号b 撞击在非常靠近中心位置的电极端口位置时,由(3)式可计算出信号在传输线上的传输速度:
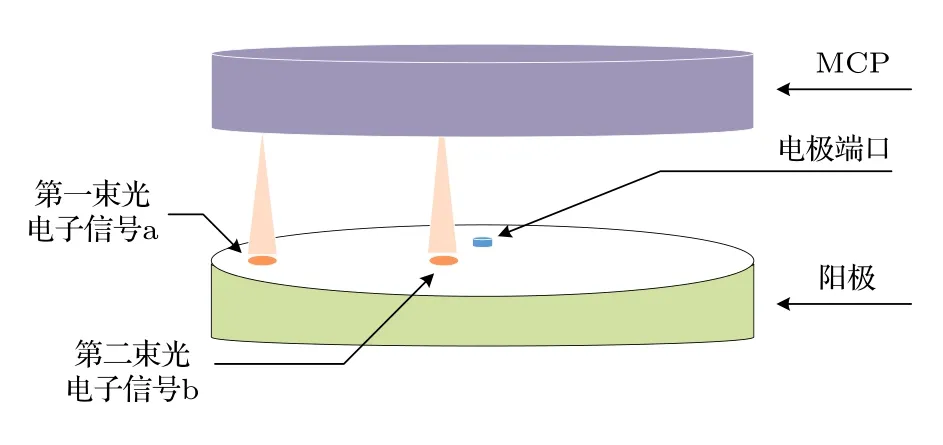
图3 阳极接收光电子信号示意图Fig.3.Schematic diagram of anode receiving photoelectron signal.

式中,εr表示材料的相对介电常数,µr表示材料的相对磁导率.
计算出从阳极边缘传输至电极端口位置的时间约为41.8 ps.由此可见,传输时间远大于两束光电子信号的时间间隔.后端电子学首先接收到更靠近电极端口的第2 束光电子信号,这将会给MCP-PMT的时间分辨率带来不良影响.说明由位置引起的时间测量误差是一个不可忽视的问题.
3 消除时间测量误差方案
3.1 延迟线阳极消除时间测量误差
为了能够准确计算出光电子信号在阳极的到达时间,需消除由位置带来的时间测量误差,相比于其他位敏阳极,延迟线阳极利用信号的时间信息进行位置计算,读出电子学不需要添加额外的时间测量通道.另外,信号是在传输线上进行传输,计算值相对其他阳极较为精确,因此,延迟线阳极是比较理想的选择.
首先可根据延迟线阳极的位置分辨原理,精确计算出每一个光电子信号在阳极的二维位置,再根据延迟线阳极的设计结构计算出该位置到电极端口的传输距离s,延迟线阳极接收光电子信号简化示意如图4 所示.
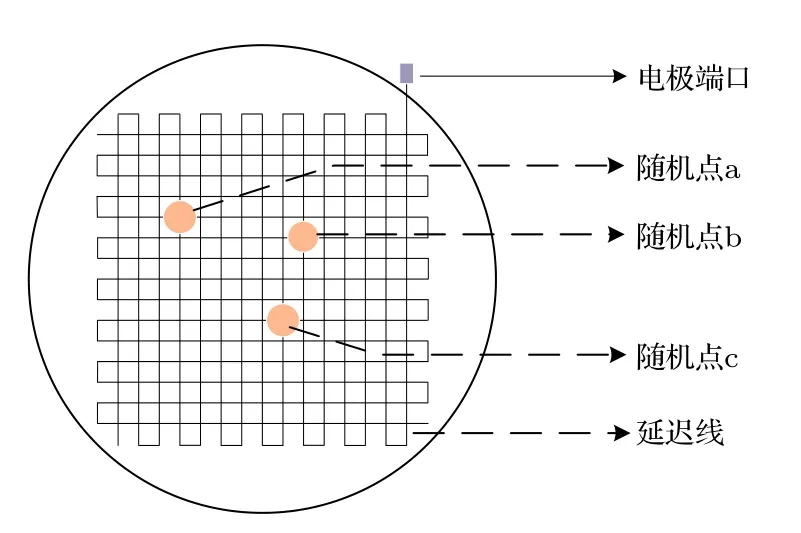
图4 延迟线阳极接收信号示意图Fig.4.Schematic diagram of the signal received by the anode of the delay line.
假设3 个随机信号打在阳极上,紧随着向电极端口进行传输,经测试所得到的到达时间为t1,结合(3)式便可以得到从光电子信号到达阳极的位置传输至电极端口的传输时间t2,实际到达时间t由(4)式得到:

3.2 延迟线阳极位置分辨方法
位置分辨原理如图5(a)所示,延迟线两端为两个电信号探测装置,当阴极探测到光电子之后,经MCP 通道倍增形成电子云团,电子云团在外电场的加速作用下被延迟线阳极收集在某一位置X0上,X0为距离端口A1点的距离,此时电信号通过延迟线向两端进行传输,根据端口对信号探测到的时间,便可以确定光电子撞击在延迟线上的位置.
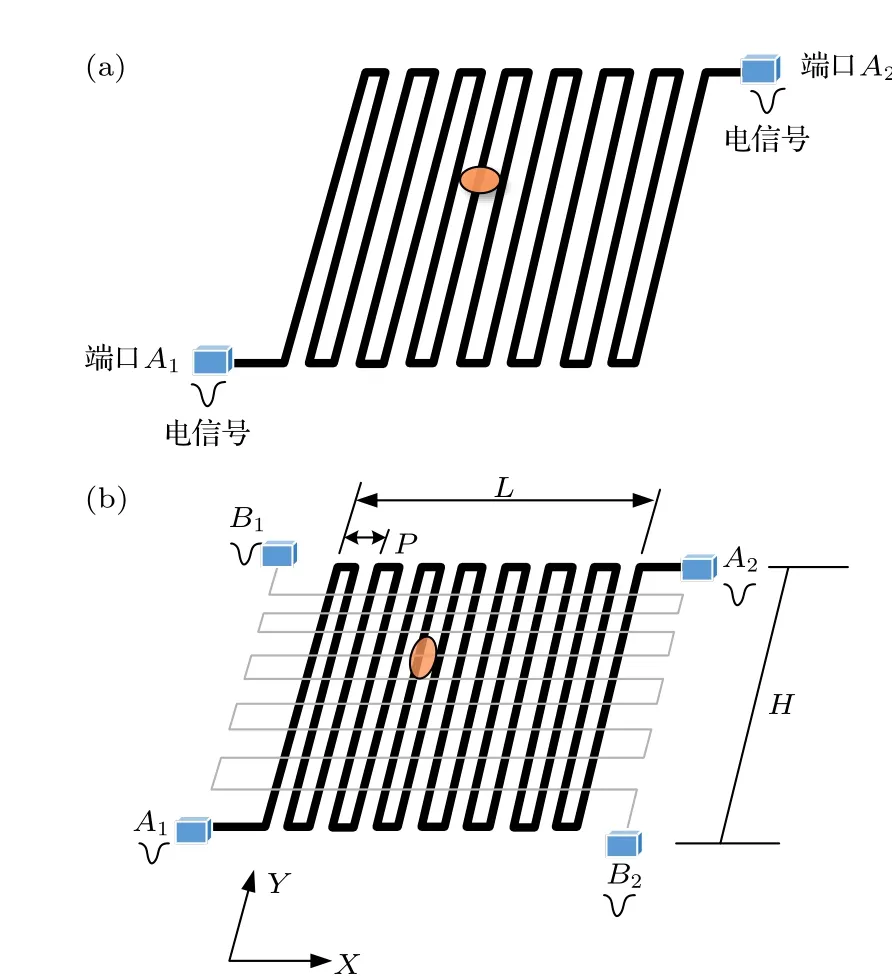
图5 (a)延迟线收集到光电子;(b)二维延迟线位置分辨图示Fig.5.(a)Photoelectrons collected by delay line;(b)position-resolved illustration of a 2D delay line.
为了能够在二维位置上确定光电子X-Y方向上的点,将两条延迟线相互正交放置但不相交.如图5(b)所示,其下层为Y方向延迟线,上层为X方向延迟线.假设延迟线上的信号传输速度为v,则:

其中εr为介电常数[17,18].
信号在X方向的等效传输速度为

其中,P为蛇形延迟线一个弯折周期,L为延迟线X方向的长度,X0为电子云团在延迟线阳极的位置(A1端为起始零点),f为相邻线间耦合修正系数,H为延迟线Y方向长度.假设信号在X方向传输到延迟线A1和A2两端的时间分别为tx1和tx2,那么信号的传输时间差为

同理可得光子入射在Y方向的空间位置,进而获得光电子在二维延迟线的二维坐标.光电信号在任一组延迟线上传输的时间之和是一个常数T,与电子脉冲束打在延迟线上的位置无关,如(8)式所示:

式中,t1为电信号在X方向上向A1端传输的时间,t2为电信号在X方向上向A2端传输的时间.(8)式给出了判断一个时间事件真伪的独特依据,进而筛选出噪声信号,这可以排除系统噪声的影响.
4 时间分辨优化方案实验验证
实验中使用X-Y二维位置灵敏探测器,采用双层蛇形延迟线阳极结构,延迟线分为两组,上层延迟线类似于微带线结构,下层延迟线类似于带状线结构,延迟线之间的间距为0.35 mm,两组延迟线形成平面之间的距离为1 mm,其实物图如图6(a)所示[19],延迟线阳极探测器示意如图6(b)所示.
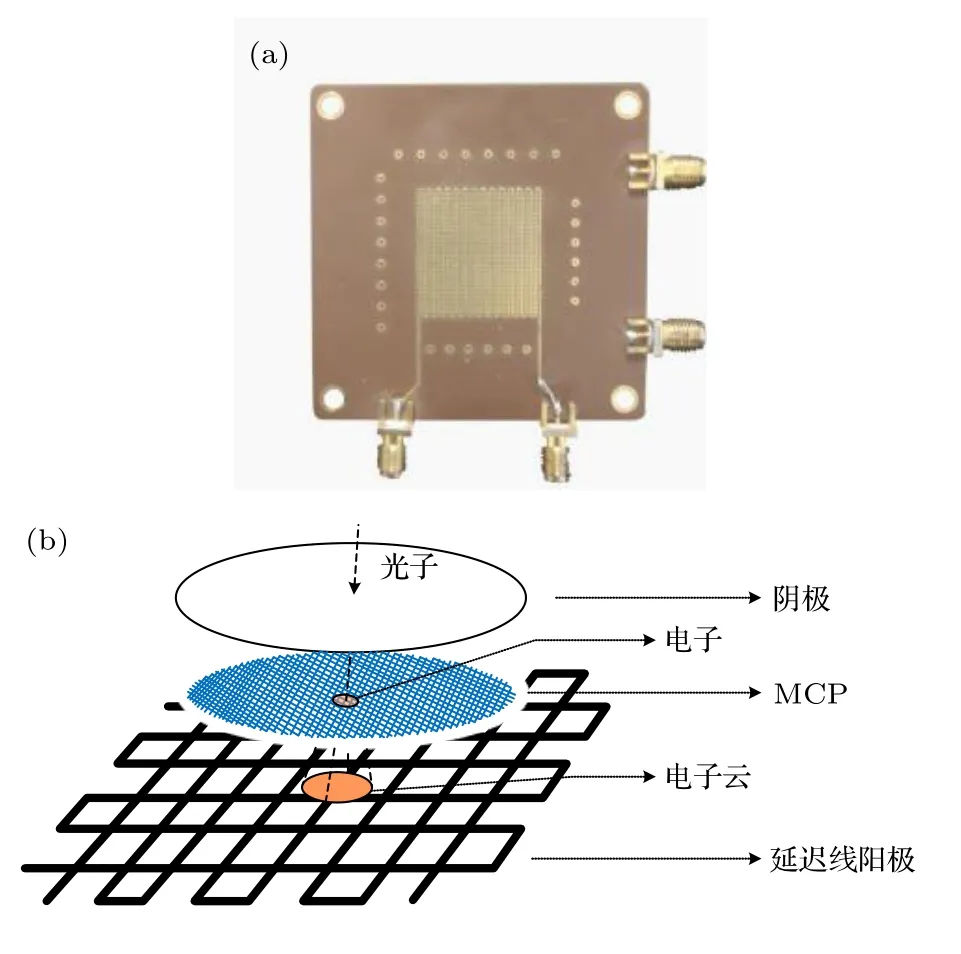
图6 (a)延迟线阳极实物图;(b)延迟线阳极探测器示意图Fig.6.(a)Real picture of delay line anode;(b)schematic diagram of the delay line anode detector.
4.1 延迟线阳极端到端信号测试
利用基于普通4 层PCB 工艺制作的延迟线阳极,分别进行上层X方向和下层Y方向端到端的延迟信号测试,该结构的延迟线阳极具有制作简单、低成本和高探测率等优点.
分别在二维延迟线的两个端口进行脉冲信号驱动,同时利用数字荧光示波器在另一端口的输出信号进行探测,结果如图7 所示.
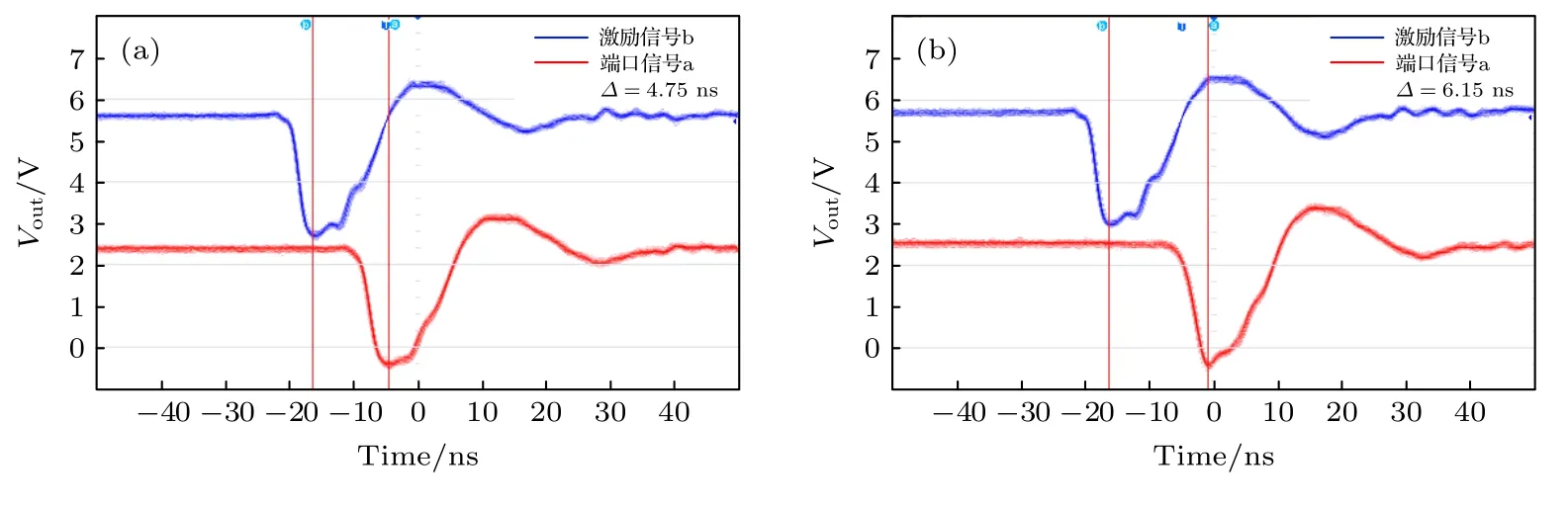
图7 (a)上层延迟线端到端测试;(b)下层延迟线端到端测试Fig.7.(a)The end-to-end test of the upper delay line;(b)the end-to-end test of the lower delay line.
表1为端到端测试情况.从表1 可以看出,上层X方向的延迟线端到端延时为4.75 ns,幅值平均值为286 mV,端到端衰减为42.8%;下层Y方向的延迟线端到端延时为6.15 ns,幅值平均值为336 mV,端到端衰减为32.8%,其中传输线以及SMA 转换接头的传输衰减为4%,X方向和Y方向延迟差异是由于该延迟线阳极结构中传输线特性导致.
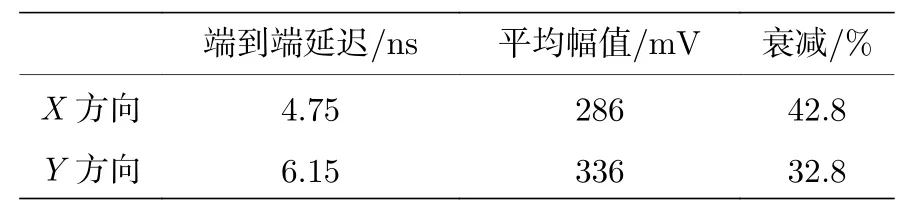
表1 端到端延时测试结果Table 1.End-to-end latency test results.
4.2 位置引起的误差补偿测试
利用多通道同步延迟控制器模拟探测器将光电信号发射至延迟线阳极,在阳极上层延迟线任意一位置进行脉冲驱动,设置幅值为3.5 V.随机在阳极8 个位置a,b,c,d,e,f,g,h 点驱动脉冲,由延迟线阳极设计结构计算得出距离端口路径长度为s,各随机点的s值分别为653.9,527.4,434.7,352.7,473.8,308.5,480.6,427.1 mm.
测试情况如图8 所示,测试结果如表2 所示.
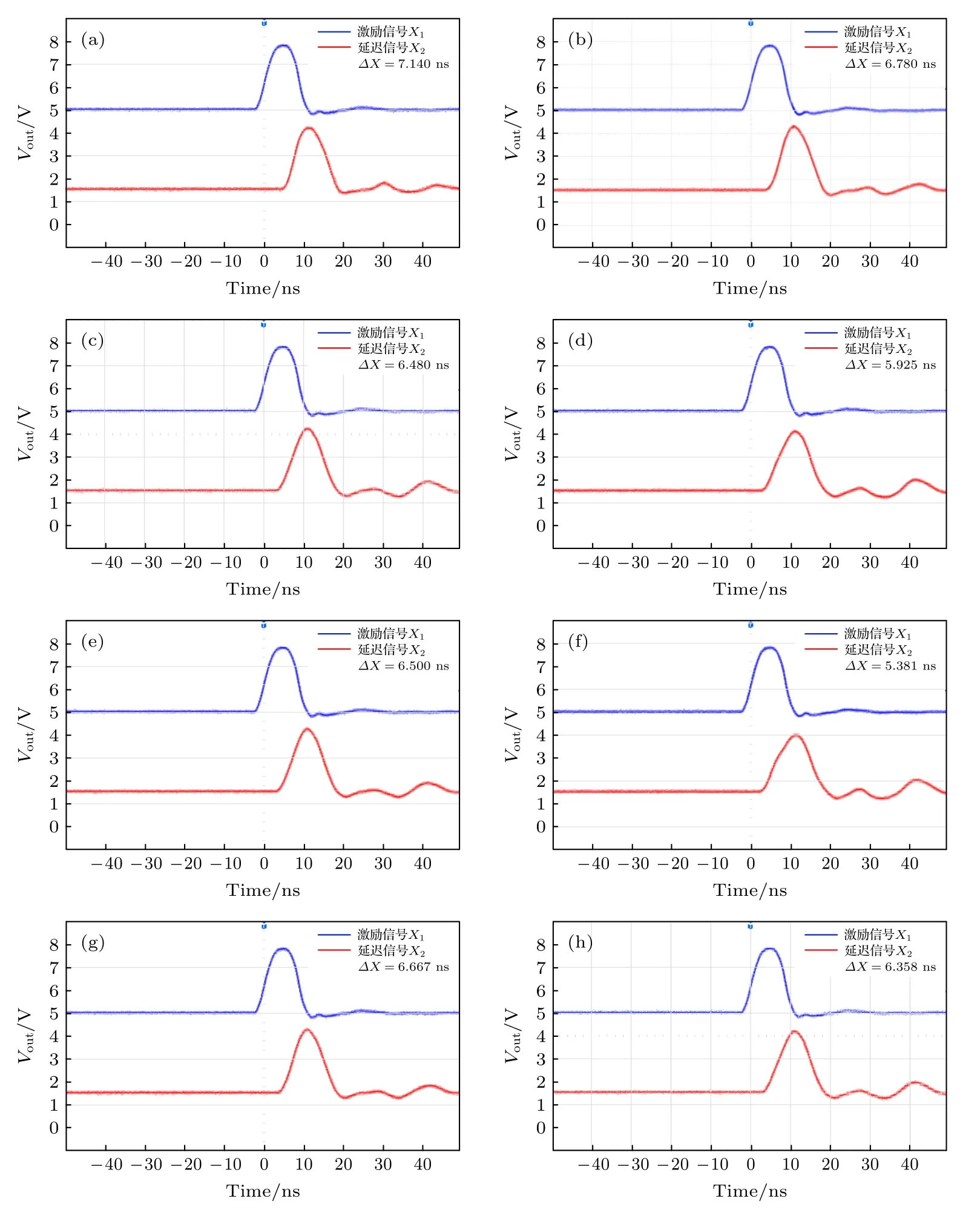
图8 (a)—(h)分别为a,b,c,d,e,f,g,h的信号脉冲Fig.8.(a)–(h)are the signal pulses at point a,b,c,d,e,f,g,h,respectively.
从表2 可以看到,经过多次实验验证,在测量光电子信号传输至阳极时的到达时间,将位置造成的时间测量误差进行弥补,相比于各电信号的原始时间测量,所得到的实际到达时间更短.
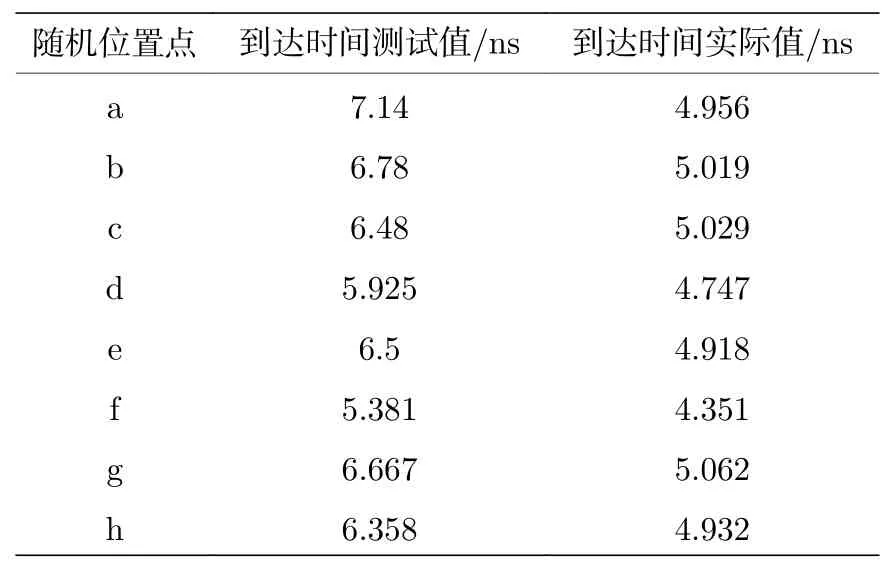
表2 时间测量误差补偿结果Table 2.Time measurement error compensation results.
基于MCP-PMT的单光子探测器时间分辨率与探测器构造本身具有非常密切的关系,MCP 足够小的物理维度是满足皮秒时间分辨的必要条件,其孔径越小,分辨精度越高,同时,脉冲波形和信号动态以及探测器本身的噪声也是影响时间分辨的重要因素[20],这对探测器构造以及信号处理方面提出更高的要求.然而,时间分辨率的瓶颈也取决于前端电子学和阳极结构.通过本研究验证,由光电子信号在阳极位置上的差异同样会造成信号的时间测量上的误差,这无疑给时间分辨引起误差.通过采用延迟线阳极对时间测量误差进行弥补,为提升探测器时间分辨提供了良好的思路以及理论依据.
5 结论
基于MCP-PMT的延迟线阳极探测器具有高精度位置分辨和时间分辨的优点,本文分析了影响探测器时间分辨率的因素,并针对由光电子信号在阳极位置的不同而造成的时间测量误差进行了具体研究,提出一种简单且行之有效的弥补时间测量误差的方法,并进行多次的实验测试验证.结果表明,对位置造成的时间测量误差进行补偿,将会使信号在阳极上到达时间测量更加精确,进一步为提高单光子探测器的时间分辨率提供可靠的依据.
猜你喜欢
物理学报(2022年15期)2022-08-12
红领巾·萌芽(2022年3期)2022-03-13
科学导报(2020年66期)2020-11-02
微电机(2019年12期)2019-03-26
分析化学(2017年12期)2017-12-25
教育教学论坛(2016年49期)2017-02-27
教育教学论坛(2017年2期)2017-02-10
物联网技术(2016年12期)2017-01-21
发明与创新(2016年7期)2016-12-18
科技视界(2016年26期)2016-12-17
