一种水上航行场景可见光偏振图像融合方法
2022-12-13 05:44肖长诗文元桥詹文强陈芊芊
数据采集与处理 2022年6期
姜 阳,肖长诗,2,3,文元桥,2,詹文强,陈芊芊
(1.武汉理工大学航运学院,武汉 430063;2.内河航运技术湖北省重点实验室,武汉 430063;3.山东交通学院威海校区威海海洋信息科学与技术研究院,威海 264200)
引 言
在水上航行的特定环境中,不像室内或公路交通等结构化场景,气候条件恶劣,场景信息高度非结构化,由于船体摇晃、光照条件变化、波浪、水面反光和镜面倒影等干扰造成的复杂水面动态纹理、以及由于水雾造成的低能见度和低对比度等困难,会极大地影响无人船感知模块的信息获取。通过传统的图像信息采集方法受水面背景的影响,无法获取准确可靠的图像信息,导致图像语义分割不准确。
偏振成像探测获取到的物体反射或辐射光波的偏振态信息,可以有效区分不同材质、不同表面形态、不同导电率的散射体,从而抑制杂乱背景,突出目标的细节特征,在目标探测、特征提取、大气遥感、生物医学影像等领域具有相当大的应用潜力[1‑4]。昆明物理研究所的柳继勇等[5]提出了一种基于阈值分割的像素级红外偏振图像融合算法,该算法用高低帽剪切进行阈值分割并计算隶属度,根据隶属度进行图像融合;Cremer等[6]利用长波红外探测器和中波红外探测器对海面上的中型和小型人造物体目标的偏振特性进行研究,结果表明偏振技术有利于人造目标的识别与跟踪;Yemelyanov等[7‑8]以HSV颜色空间模型为图像融合的基础,将红外强度图像和对应的偏振信息图像在3个通道上进行融合,生成的伪彩色融合图像在对比度和信息熵等图像信息指标数值上有显著提升;Egan等[9]利用彩色红外成像仪对伪装军事目标进行了偏振成像探测实验,结果表明偏振技术能改善目标图像对比度,抑制杂乱背景,有效提升目标识别率;Lavigne等[10]通过红外探测装置系统,获得了红外光强度图像和对应的偏振图像,并在HSV颜色空间上对不同类型图像中的公共信息进行了融合,其融合图像的结果表明该探测器通过偏振技术能识别目标阴影区,有效提升了其装置的探测能力;Kalra等[11]利用偏振相机捕捉多模态图像,并将处理后的数据与深度学习相结合,实现了在不同场景和背景条件下对杂乱透明物体的实例分割,与传统的基于图像的分割方法相比有了很大的改进;Li等[12]使用从不同反射界面获得的偏振纯度系数(Indices of polarimetric purity,IPPs)作为去偏振特性的标准来实现对具有不同粗糙度的有机涂层覆盖目标的分类,结果表明,不同反射界面的去偏振性能在IPPs空间是独一无二的,为目标分类和目标探测提供了新途径;同年,Li等[13]将IPPs用于描述散射系统中葡萄糖浓度(Glucose concentra‑tions,GC)的变化,结果表明,与偏振度(Degree of polarization,DoP)相比,对于前向散射检测来说,IPPs的P1是GC更好的指示剂。综上,国内外围绕偏振信息探测、应用、成像和处理方面做了大量工作,偏振技术在人工智能系统的感知模块中运用还较少,在智能航行系统中运用到偏振特性的更少,在偏振方面的图像融合,大多数都为定性结论,并没有对偏振图像的机理进行研究分析。在水上航行场景中,偏振信息特征极其复杂且敏感,尤其是在恶劣情况下,偏振特性受可见光特性和采集设备的条件制约,其变化剧烈,能够作为关键信息对感知模块获取的信息量进行补充,增加了有效的环境信息量,对恶劣天气的抗干扰性强,有利于恢复图像的对比度及局部细节,针对于水岸线难以分割、弱小目标难以发现和强光耀斑倒影等特有困难问题,进行水上航行场景可见光偏振图像的融合研究,对水上交通运输的发展有着重要作用。
对此,本文提出一种基于HSV颜色空间的水上航行场景可见光偏振图像融合方法。以偏振技术为方法,通过采集航行场景的0°、45°、90°和135°四个方向的偏振图像,将采集到的RGB偏振图像引入HSV颜色空间后提取图像的偏振度信息、偏振角信息,根据水上航行场景的可见光偏振特性分布规律,制定不同区域的融合规则,通过图像融合算法对上述偏振信息融合,最后,通过将可见光偏振图像的偏振信息与颜色空间信息进行融合得到最终结果。本文将偏振应用到对无人船航行场景的语义理解上,有助于提高对可见光图像偏振信息的准确融合,提升无人船针对恶劣水上航行场景的视觉感知能力。
1 可见光偏振图像融合
本文通过对同一航行场景的不同偏振态信息的处理,制定了不同航行场景模块下对应的偏振特征融合规则,提出了一种基于HSV颜色空间的可见光偏振图像融合方法,获得更加丰富、准确的航行场景图像信息。本文主要贡献描述如下:
(1)考虑到水上航行场景的恶劣程度,提出将偏振信息应用到水上航行场景的无人船感知模块系统中,分析不同的偏振图像特性,将不同信息进行融合。这项工作将有助于提升无人船在恶劣航行场景下的环境感知能力。
(2)在进行图像的语义分割时,传统的可见光图像分割方法经常受到边缘信息模糊化的困扰。为了解决这个问题,提出将偏振信息应用到无人船航行场景的语义理解上,结果表明,分割效果图像中水岸交界线被完整、清晰地分割出来,关于天空和非天空区域的二值分割效果良好。
(3)与传统的图像融合方法相比,本文通过以水上航行场景偏振特性分布规律为基础,制定了不同场景模块下对应的偏振特征融合规则,提出了一种基于HSV颜色空间的可见光偏振图像融合方法。图像融合效果良好,在恶劣环境下效果稳定。
1.1 偏振表述
Stokes[14‑16]矢量可以被用来描述完全偏振光、部分偏振光以及非偏光。由于在自然界中圆偏振光很少,再加上环境影响因素和实验仪器影响因素等,导致圆偏振度极小,在本文中主要研究的水上航行情况几乎可以忽略不计,因此主要研究的偏振度信息是线偏振度信息,采取改进Pickering方法,通过获取角度为0°、45°、90°和135°四个方向的图像数据,进行Stokes参量解算,该方法的误差对偏振态的影响更小,多个方向角的数据采集可以降低测量误差,其参量均是光强的时间平均值,具有强度量纲,且有不少元素为零,没有除或根号开方等运算,计算简单。

式中:I为光的总强度;Q为0°和90°上的光强差;U为45°和135°方向上的光强差。
现有的偏振检测研究大多是偏振度和偏振角(Angle of polarization,AoP),可以反映出物体表面的粗糙度、导电率以及纹理等信息[17]。
偏振度是指偏振光的能量与全部光能的比例,能反映出物体的材质纹理信息。

偏振方向(偏振角)是指椭圆主轴与传统坐标系轴之间的夹角,能反映出物体表面反光角度的信息。

1.2 图像融合
图像融合是提高偏振图像检测性能的关键步骤。主要的偏振信息图像融合算法按照融合方法原理的不同可以分为:在不同尺度上基于几何空间分析的方法、基于图像像素值以数理概论和统计等为原理的方法、在颜色空间模型上将不同信道图像融合在不同的颜色通道的方法和以区域分割为前提对不同类型区域有不同融合策略的融合方法等。基于颜色空间的图像融合算法是以颜色空间模型为基础,将待融合的源图像分别以一定的权重融合在不同的色彩通道,能最大程度地保留各源图像特征信息,并以伪彩色图像的形式获得待融合图像的一种融合方法。
偏振图像与普通图像相比,可以获取场景中目标物体的不同偏振态,含有更丰富的信息,不同类型的偏振信息具有互补性。Stokes参量图像虽然可以反映出一些目标场景的偏振信息,但多幅图像的显示不利于观察和处理,因此,需要进一步采用其他融合显示方法。偏振度和偏振角图像反映了目标场景的不同信息,但其分属两幅图像,不易观察,且未包含目标场景的辐射强度信息。进行偏振信息的融合,是本文的第一步。
2 本文方法
本文以偏振成像作为基本的视觉感知和场景理解方法和工具,对水上航行视觉场景进行像素级的分类识别和理解。在水上航行的特定环境中,需要感知的场景范围较大并且高度非结构化,针对水上航行场景的高动态范围、低能见度、低对比度、强耀光、波浪动态纹理等复杂的非结构化视觉环境,提出将偏振应用到无人船对水上航行场景的语义理解上,对水面视觉场景中不同目标的静态图像特征、动态图像特征进行分析。提出了一种基于HSV颜色空间的偏振图像融合方法。图1为提出方法的示意图,包含了数据输入、数据处理、信息提取以及图像融合4个部分。主要通过以下步骤完成:

图1 基于HSV颜色空间的偏振图像融合方法示意图Fig.1 Schematic diagram of polarization image fusion method based on HSV color space
(1)采集原始偏振图像数据,获得目标场景的0°、45°、90°和135°四个偏振方向的图像。
(2)对偏振图像的偏振特性信息进行优化。
(3)对偏振图像的偏振信息进行融合。
(4)对偏振图像进行调制。
(5)将偏振图像与颜色信息进行融合。
2.1 偏振图像采集
本文使用的采集设备主要由线偏振片和图像采集设备组成,目的是要获取偏振角度分别为0°、45°、90°、135°的场景图像。入射光经过线偏振片,出射光的强度信息再被光电感应设备捕捉,获得含有不同偏振态的信息。采用CMOS感光类型的单反相机,线偏振片采用镀膜类型的配套偏振片,偏振片置于单反镜头前。偏振成像光路图如图2所示。

图2 偏振成像光路示意图Fig.2 Schematic diagram of polar‑ization imaging optical path
整体工作流程如下:
(1)将配套的线偏振片安装在单反相机上,将相机安装在稳定三脚架上;
(2)调整好ISO感光度、快门曝光时间和光圈大小,手动对焦,固定各参数值;
(3)固定相机,以此时线偏振片位置为初始0°方向,通过线型控制器捕获到图像I(0°);
(4)顺时针旋转线偏振片,每次顺时针转动45°,转动3次,在旋转角度为45°、90°和135°时,通过线型控制器捕捉到I(45°)、I(90°)、I(135°)的场景图像分别拍下,通过软硬件算法获得对应的偏振信息,再以图像的方式进行表示;
(5)以相同场景的I(0°)、I(45°)、I(90°)和I(135°)场景图像,转换成对应偏振方向的HSV图像,以获取到的对应偏振方向V图像,按照偏振成像原理,合成偏振图像。
由于单反相机捕获的图像格式和计算机中储存、处理的图像格式均为三原色通道矩阵(BGR或RGB等),考虑到偏振信息是以光强信息为基础进行提取的,因此将三原色通道矩阵映射到HSV颜色空间,将完全包含光强信息的V矩阵提取出来进行处理,通过计算可以获得图片中每个像素对应位置的I、Q和U,进而可以获取不同位置的偏振度和偏振方位角信息。
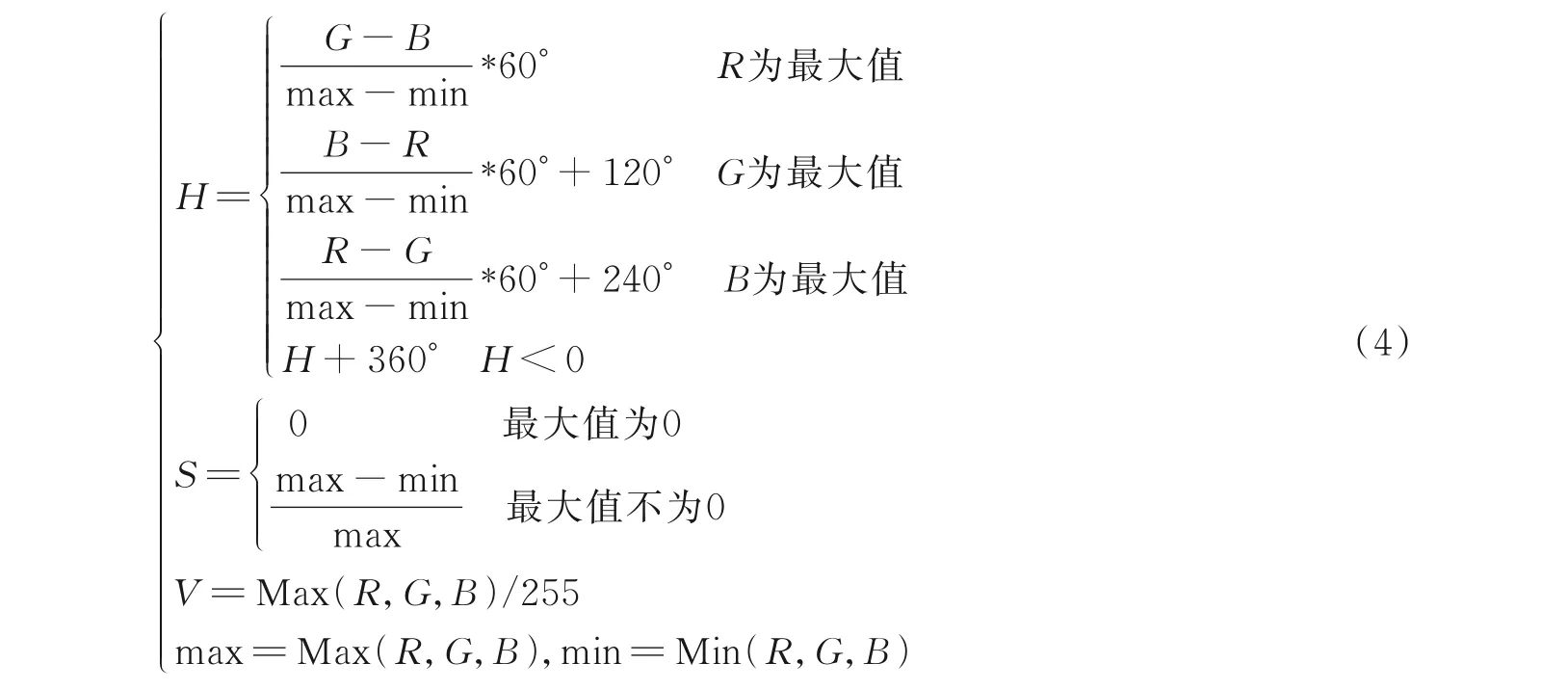
HSV与RGB相互转换的规则如下:
(1)RGB‑>HSV的算法规则
(2)HSV‑>RGB的算法规则

式中:R、G、B范围在[0,255]之间,H通道代表色调,指平常的颜色,用角度度量,范围为[0°,360°],红色为0°、S表示颜色接近光谱色的程度,取值[0,1],值越大,颜色越饱和,越接近光谱色,越深而艳;V通道代表明度,表示颜色明亮的程度,是纯粹的光强信息,范围为[0,1]。
2.2 偏振特征信息优化
偏振信息中携带着目标物体信息,受到各种影响因素的影响。偏振度P图像能准确反映偏振特性,但天空的偏振分布和水面强烈的偏振反射情况会严重地影响图像的可视化效果。由于天空的可见光传播方式以散射为主,局部区域以无偏特性为主;而光线以反射为主要传播方式的其他区域,在进行偏振方向光强差计算时,能将物体表面材质的粗糙度信息与纹理特征信息提取出来,场景中以反射为主的区域集中在水面与固体物质上,天空中存在的云也是以反射为主。因此在参量Q、U的成像结果中,天空无云区域以黑色为主体,而其余区域表现出强烈的反射性质特征,因此设计考虑参量Q和参量U的偏振信息进行成像,优化偏振信息定义为

由图3可知,在强偏振反射的情况下,偏振度图像的水面在特定区域的偏振度数值异常高,表现出水体由于布儒斯特角和镜面反射的原因而产生的特有的“偏振耀斑”现象,而在优化的偏振信息图像中,不仅抑制了这种“偏振耀斑”现象,而且水、天、非水非天各自偏振特性明显,交界线清晰。这种偏振成像方法所生成的偏振特征图像克服了水面偏振度反光现象带来的影响,保留了场景物质本身的偏振特性,具有良好的稳定性。在图像信息中,同时包含了边缘、轮廓、纹理信息和偏振分布特性,不仅提高了图像本身的清晰度,凸显了弱目标的对比度,同时还降低了环境对其的负面影响,增加了图像信息的稳定性。
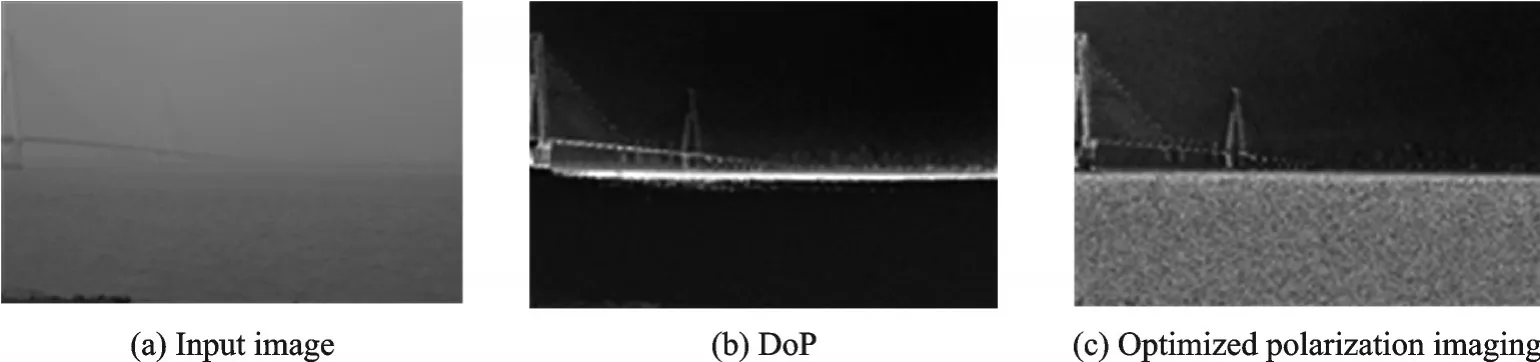
图3 优化偏振成像实验对比结果Fig.3 Comparison results of optimized polarization imaging experiments
2.3 偏振信息融合
整体的偏振信息图像融合规则步骤如下:
(1)定义像素标签,以优化的偏振信息图像为分割标准,用平均图像熵和均值指标作为分割指标,对场景图像进行天空与非天空的二类标签定义;
(2)将天空区域的偏振信息按照对应的融合规则进行融合;
(3)将非天空区域的偏振信息按照对应的融合规则进行融合。
信息熵(Information entropy)是由香农在信息论中提出,衡量图像信息丰富程度的一个重要的图像融合质量评价指标,定义如下

式中:p i为灰度值i的像素数与图像I总像素的比值,L为图像总灰度级数值。信息熵越大表示信息量越大,图像越复杂、像素分布越没有规律。
在大部分场景情况下,天空噪点也较少,而非天空区域噪点较多。这两部分的区别较明显,其明显的区域特征可由代表混乱程度的信息熵来描述,因此以优化的偏振图像为标准进行分割,分割算法为判断像素领域的平均信息熵是否小于场景图像的整体平均熵,分割规则如下

式中:E(i,j)为偏振优化信息图像中(i,j)位置的领域平均图像熵,E为偏振优化信息图像的总平均图像熵。
在图4中,黑色表示非天空区域,白色表示天空区域。分割效果图像中水岸交界线被完整、清晰地分割出来,原场景图像中模糊的桥梁与钢丝绳等物体也能被较为准确地分类,总体来说场景图像关于天空和非天空区域的二值分割效果较好,以此来对图像像素进行分类。
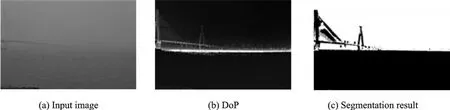
图4 分割实验Fig.4 Segmentation experiment
由于水上航行场景中同时包含天空、水面和非水非天模块,每种模块都属于不同的物态,不同物态之间的偏振信息差异较大,偏振特性分布规律也是不同的。因此在不同的场景模块下,需要制定不同的偏振特性信息融合规则,分模块定义融合规则如下:
(1)天空偏振信息融合规则
为了融合天空中中性点等偏振特征分布规律信息,选择像素最小值进行融合,融合规则为

式中:f(i,j)为融合图像在(i,j)位置的像素值;a(i,j)和b(i,j)为待融合图像的像素值;type(i,j)为在此位置的像素属性。
(2)水面偏振信息融合规则
水面偏振信息表现出代表自身属性的阈值信息和波浪纹理信息等,其镜面反射现象在一定的情况下能反射出天空和岸边物体的偏振特性分布,水面上的船只和航标等导体的偏振特性较暗,木质船体等绝缘物质偏振特性为高亮,水面的偏振反射区域也为高亮区域,情况复杂多变,因此为融合困难区域,在这个模块的融合规则应该以大梯度、高对比度为主,其特征信息的融合权重应该用可以表示信息丰富程度的方差进行衡量,融合规则为
式中:Ca和Cb分别表示待融合图像a、b的融合系数;V a(i,j)和V b(i,j)分别表示待融合图像a、b在(i,j)位置的领域方差值。
(3)固体偏振信息融合规则
固体表面的偏振信息中包含了反映材料性质和纹理性质的信息,其中特有的导电率和粗糙度信息能较为准确地确定固体属性,有助于提升物体识别的准确度,为了包含更多的信息,将信息熵与对比度较大特征进行融合,其融合规则可与水域融合规则相同。
水面和固体的融合规则可相同,均以方差为权重按比例进行融合,因此可以将水面和固体划为非天空区域,融合规则如下
在这样的融合规则下,对场景图像的准确分割是很重要且关键的,会影响到像素的分类,进而影响到融合规则的选择,最终会导致图像的融合效果发生改变。
2.4 偏振图像调制
为了能使偏振信息图像具有光强的属性,实现与颜色信息的融合,需要对偏振信息图像进行基于光强的调制,同时增加图像中特征的对比度,具体步骤如下:
(1)将偏振度信息、偏振边缘信息和偏振角信息分别根据自己的调制系数进行调制,调制系数可以连续且单调,其中偏振度信息和偏振边缘信息的调制系数如下[18]

式中:M为调制系数,P为待调制信息数据。偏振角调制函数形式如下

式中:M为偏振角的调制系数,χ为偏振角图像,m和n为图像尺寸,μ为偏振角图像的均值。
(2)以2.3节确定的融合规则和融合方法对偏振度、偏振边缘和偏振角图像信息进行融合,得到偏振信息融合图像;
(3)再以Stokes偏振信息矩阵中的S0偏振总光强参量进行调制。
从图5可以看出,调制前的偏振信息图像仅能直观表达出较强的偏振特征,很多细节不能直观表达,图像整体对比度较低,各图像经过调制后,不同区域的像素值差异增大,偏振图像能更多、更清晰地表达出细节和边缘等特征信息,并且图像整体对比度较高,同时具有光强属性,包含偏振光强信息,更加符合模型机理逻辑。

图5 调制图像前后对比Fig.5 Comparison of images before and after modulation
2.5 偏振图像与颜色信息融合
为了突出偏振信息图像,融合准确、完整的颜色信息,同时符合人眼的视觉特性,针对HSV颜色空间能将光强信息与色彩信息分开这一特性,本文尝试了基于HSV的彩色融合,将原场景图像和偏振信息图像在HSV通道上进行融合。以水上航行场景偏振特性分布为基础,在进行偏振信息提取时,将RGB图片转换成HSV颜色空间,以偏振特性融合图像为新的V通量信息,与原始图像中的H、S通量信息,共同组成HSV颜色空间下的图像三通量,融合其原有的颜色信息,再反变换成RGB格式的图像,用以储存、传递和处理。融合图像能够全面反映被测目标场景的偏振及辐射信息,将偏振图像进行彩色化融合可有效反映目标场景的强度和偏振信息,有利于增加目标的可识别能力,但是,不同的彩色融合方法效果差异较大。
从图6(b)和图6(c)中可以观察到天空、水面和岸边的分界线明显,物体的边缘轮廓和纹理特性突出,不同物体之间的偏振信息存在明显差异。图6(d)是提取出来的场景偏振特征图,图中水、天、非水非天各自偏振特性明显,交界线清晰。图6(e)是场景的偏振融合图。图6(f)是场景的偏振强度图。图6(g)是场景的偏振信息图像,偏振信息中不仅包含偏振度特征,还包含了偏振角特征,在一定程度上能增强对比度和丰富边缘轮廓信息,相对于原图像难以区分的水岸交界线有良好的区分作用。图6(h)是场景的颜色信息图像。由图6(i)可知,融合图像同时具有偏振信息和颜色信息,转化成HSV颜色空间后的偏振信息更加准确、丰富。边缘、轮廓和纹理等特征信息与水上航行区域偏振特性分布规律清晰可见,能够突出水上目标和水天分界线,还能抑制过曝和倒影,较自然地融合颜色信息,没有颜色失真现象。
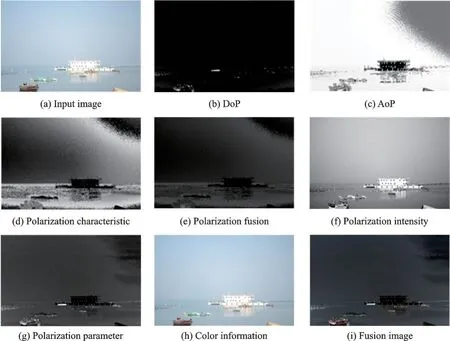
图6 图像融合过程Fig.6 Image fusion process
3 结果分析
为了确保结果的公平性和全面性,测试图像均来自日常对水上航行场景的采集,列举了3种代表性的图像分割方法。他们是分水岭算法[19]、ResNet101[20]、ResNet50[21]。拟采用K‑means[22]图像分割算法进行应用效果分析评价,K‑means聚类算法的分析流程步骤如下:
(1)确定K值,在本文讨论的水上航行场景中,理想情况下具有天空、水域与非天非水域这3部分,因此定义K为3;
(2)从数据集中随机选择K个数据点作为质心;
(3)以平方差作为损失函数,将每个像素点归类到合适的类别

式中:Lft为第t次迭代的损失总和,g(i,j)为图像(i,j)位置的像素值为X类别第t-1次迭代的质心值,分别计算各像素点到各质心之间的距离,并将各像素点划分到离最近质心的小组类别;
(4)当每个质心都聚集了一些点后,重新定义算法选出新的质心;
(5)比较新、老质心的距离,如小于阈值,算法终止;
(6)如果新、老质心距离大于阈值,则继续迭代执行步骤(3~5),直到新、老质心的距离小于阈值,算法终止。
3.1 与其他方法对比
为了验证本文方法的有效性,展示了不同图像分割方法对水上场景进行分割的视觉比较。从测试图像中选择了4对测试图像(雾天、耀斑、过曝、弱交界线)作为示例,以显示本文方法与其他方法之间的差异。原场景分割是采用本文方法直接对不带偏振片的原场景图像进行分割,不进行图像融合操作。图中本文方法蓝色区域表示可航行区域,红色区域表示不可航行区域,绿色区域表示天空区域。
图7显示了在雾天航行场景下的图像分割结果。图7(i)在雾天情况下分割结果很不理想,将水天混为了一类。图7(j)水天界线分割效果不理想。图7(k)分割效果差。图7(h)通过用本文分割方法直接对不带偏振片的原场景图像进行分割,水天线、大桥均未能清晰分割,对岸的物体也没有被分割出来。而在本文的方法中,融合图像不仅将水域区域较为准确地分割出来,还将大桥和对岸物体的轮廓较为准确分割出来,这说明偏振信息能增强图像对比度,凸显边缘轮廓信息,能够在恶劣的场景环境下,稳定获得对比度较强、目标特性较好的特征信息,具有一定程度上的去雾效果。
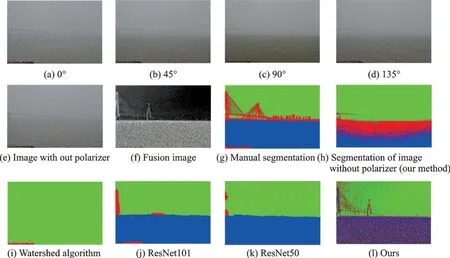
图7 雾天场景分割应用效果对比Fig.7 Comparison of the application effect of foggy scene segmentation
图8显示了在强反光的水面耀斑航行场景下的图像分割结果。图8(i)水天陆的交界线较为明确,有较好的区域特征,但水面耀斑对分割结果的影响略大。图8(j)和图8(k)两种方法水天线分割不明确,且把耀斑不同程度地归为了天空一类。图8(h)通过用本文分割方法直接对不带偏振片的原场景图像进行分割,直观可见分割效果不仅受水面的反光影响,还受到曝光范围的影响,使水面的反光区域和暗处区域不能被准确分割。而在本文的方法中,融合图像能被准确分割出水域,抑制了水面耀斑带来的不利影响。
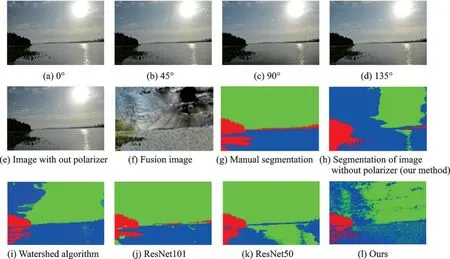
图8 耀斑场景分割应用效果对比Fig.8 Comparison of the application effect of flare scene segmentation
图9显示了在过曝航行场景下的图像分割结果。图9(i)将天空、水面和远处的大桥错误地归为一类,岸边分割效果良好。图9(j)水天交界线不明显,远处大桥细节分割不精确。图9(k)将水、水上小目标、天空错误地归为一类,不能识别出水天分界线,且未检测到水域。图9(h)通过用本文分割方法直接对不带偏振片的原场景图像进行分割,直观可见原图的水天交界线几乎不能被识别分割,天空和大部分水域被分割在一起,桥梁和另一部分水域被分割在一起,分割效果很差。而在本文的方法中,融合图像的水天岸交界线、大桥轮廓和水上目标能被较为清晰地分割出来。
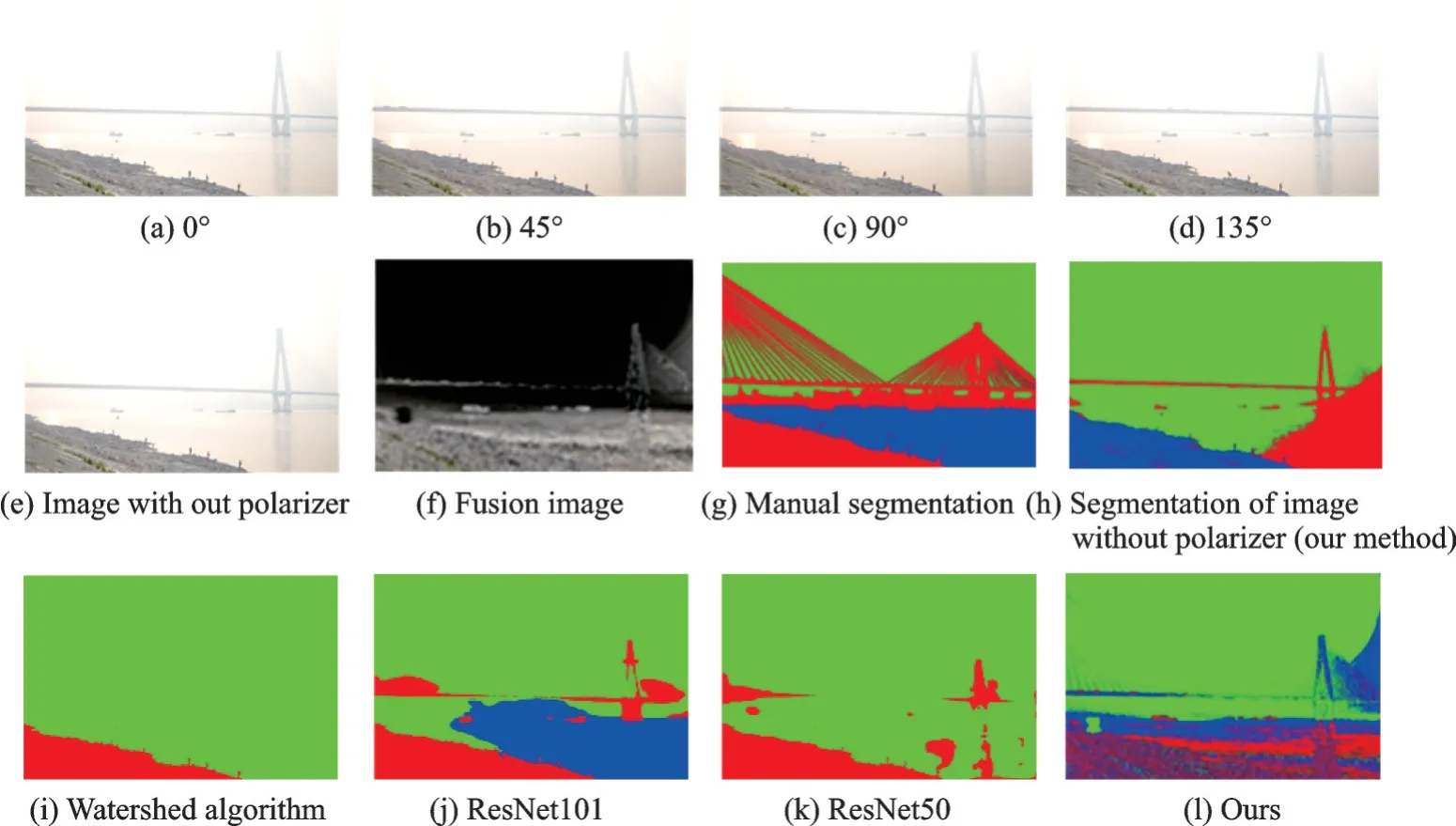
图9 过曝场景分割应用效果对比Fig.9 Comparison of the application effect of overexposed scene segmentation
图10显示了在水面弱交界线航行场景下的图像分割结果。图10(i)直观可见,分割效果很不理想。图10(j)和图10(k)分割效果不理想。图10(h)通过用本文分割方法直接对不带偏振片的原场景图像进行分割,直观可见原图的驳船、水面倒影和天空日心被分割为一类,其余天空区域与其余水面区域被分割成一类,整个水天交界线和水上主要目标被错误分割。而在本文的方法,融合图像的天空、水面、驳船和其他水面目标被清晰地分割出来。
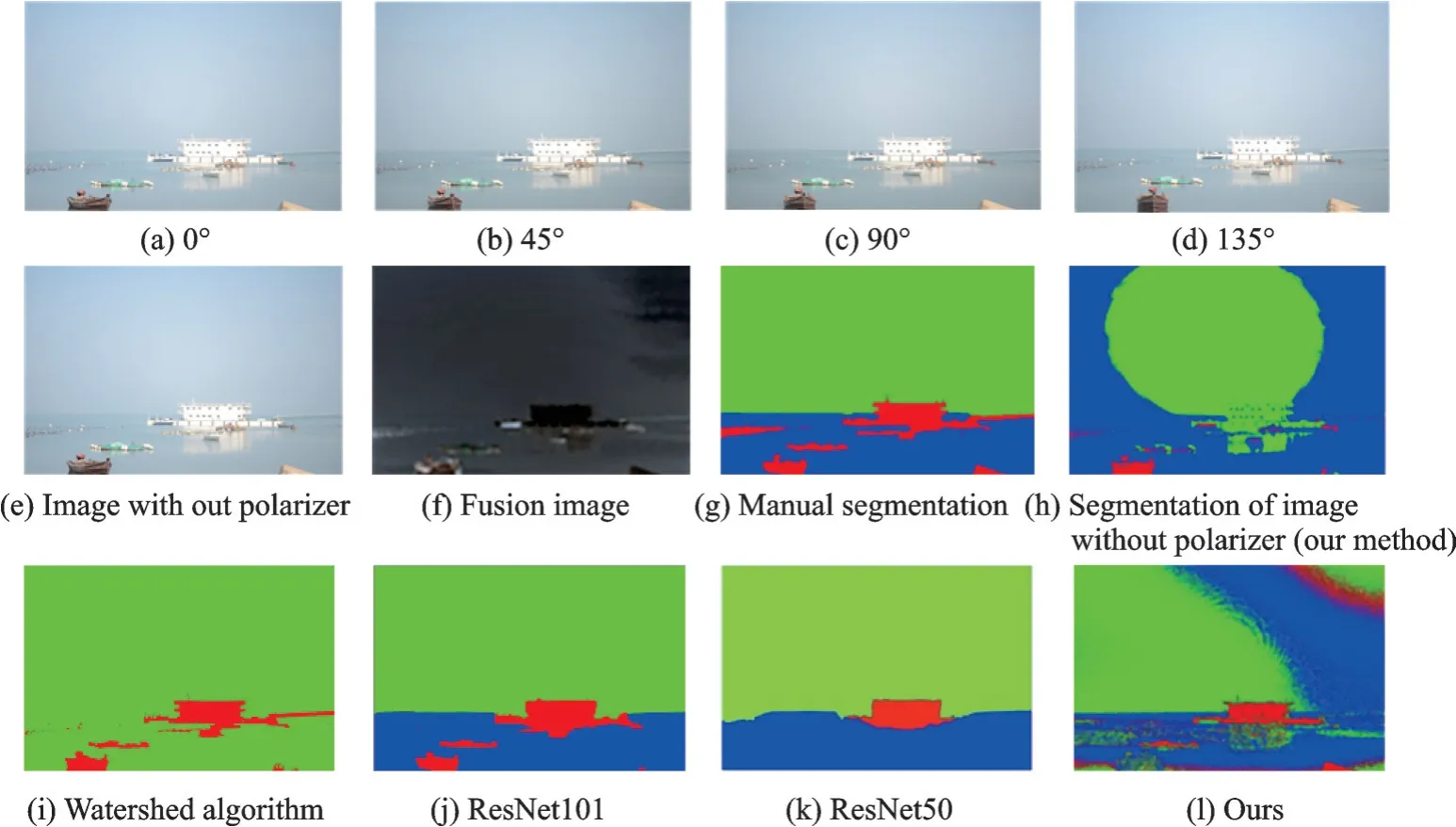
图10 弱交界线场景分割应用效果对比Fig.10 Comparison of the application effect of scene segmentation with boundary line
3.2 方法的参数比较
定义水上航行场景的综合像素精度(Pixel accuracy,PA)为
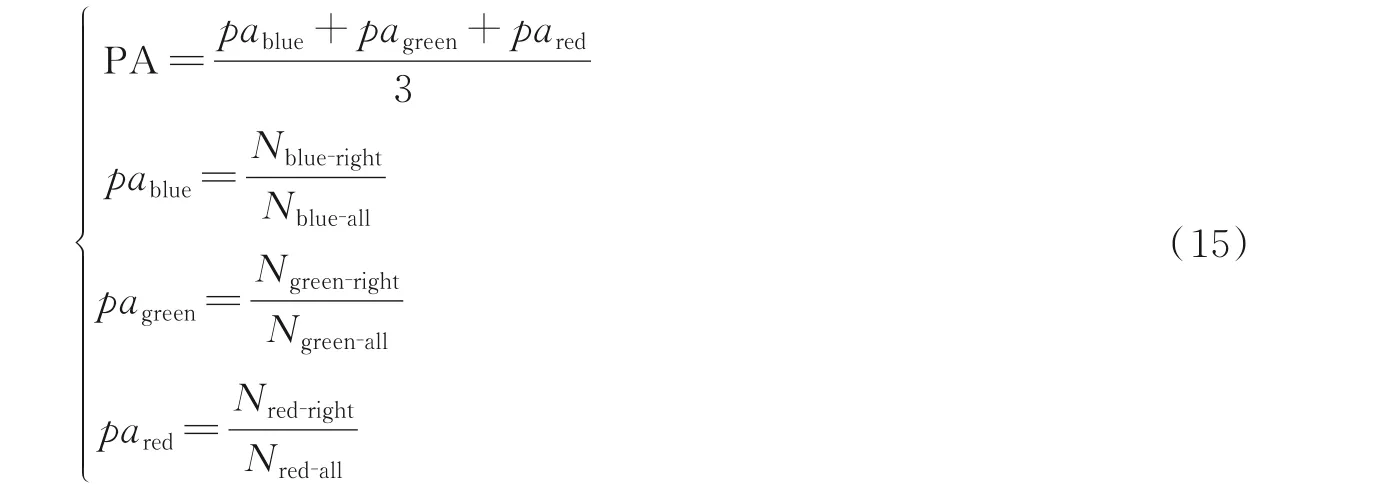
式中:N X‑all表示标准分割图像中X类像素总数,N X‑right表示对比分割图像中正确区域的X类像素总数,pa X表示X类的像素精度,场景图像中所有类的像素精度共同决定了场景整体的像素精度PA,这样PA就可以用来表示场景图像分割的综合像素精度。
融合图像的场景分割效果均优于原场景图像的场景分割效果,融合图像能有效抑制恶劣情况带来的干扰,较为准确地分割出水域、天空和非航行等区域。其中,在雾天和过曝光的场景中,融合图像分割效果的像素准确率远高于原场景图像,在弱交界线的情况下,水面交界线能被清晰分割,场景整体像素准确率均比原场景高。清晰的水岸天交界线和水面障碍物等重要信息,有助于可航行水域的准确界定、后续的航行地图生成和路径规划等研究和操作控制,其重要程度高且意义重大。场景分割应用效果实验对比如图11所示。

图11 场景应用效果对比(PA)Fig.11 Scene application effect com‑parison(PA)
因该算法生成的融合图像场景分割效果较为准确,说明该融合算法效果较好,与目前的其他图像处理算法具有较高的耦合性。
4 结束语
本文以水上航行场景可见光偏振特性为研究对象,全面地分析了不同情况下水上航行场景可见光的偏振特性分布规律,制定了不同场景模块下对应的偏振特征融合规则,提出了一种基于HSV颜色空间的偏振图像融合算法,生成的融合图像在恶劣航行场景下效果稳定,分割效果良好,水面交界线能被清晰分割,有助于可航行区域的准确界定、后续的航行地图生成和路径规划等研究和控制操作,适用于在恶劣环境下对场景信息的增强和补充,为水上无人交通运输提供了理论基础和实践证明。通过分析比较,验证了所提方法的有效性。
猜你喜欢
物理学报(2022年23期)2022-12-14
小哥白尼(军事科学)(2022年2期)2022-05-25
疯狂英语·新读写(2021年6期)2021-08-05
中国惯性技术学报(2020年2期)2020-07-24
红领巾·萌芽(2019年8期)2019-08-27
电子制作(2019年12期)2019-07-16
智能物联技术(2018年3期)2019-01-10
中国与非洲(法文版)(2017年10期)2017-11-23
中学生英语(2017年6期)2017-07-31
青年歌声(2017年6期)2017-03-13