基于PSO-BP 神经网络的激光陀螺温度补偿方法
2022-12-16 14:01王庭军
中国惯性技术学报 2022年5期
张 文,王庭军,王 雷,陶 陶
(西安航天精密机电研究所,西安 710000)
激光陀螺仪作为一种光学陀螺仪,具有精度高、启动时间短、不敏感重力、寿命长等特点[1],被广泛应用于各精度等级的惯导系统中。
受到应用环境温度变化的影响,激光陀螺的输出零偏会随之发生变化,从而限制了激光惯组的实际应用性能[2]。因此,必须开展激光陀螺的温度特性研究,建立惯组中激光陀螺的温度补偿模型,有效提高激光惯组的启动快速性和对准精度。文献[3,4]均是采用多项式拟合的方式建立激光陀螺零偏的温补模型,但在环境温度变化率较大时,模型的补偿精度也快速下降。文献[5,6]采用样条插值法建立与温度相关的惯组误差项温度误差模型,提高了系统的启动快速性以及零偏稳定性,但分段建模计算量大且限制了模型的适用性。文献[7,8]采用深度神经网络学习方法进行激光陀螺零偏温补建模,相比多元线性回归模型能够更好地消除温度及温变速率对陀螺零偏的影响。文献[9-11]采用粒子群优化算法对光纤陀螺零偏关于温度和温度变化率的温补模型系数进行寻优,与仅考虑温度影响的最小二乘方法相比,补偿精度得到显著提升。
针对激光惯组上电启动过程中陀螺仪零偏稳定性受温度变化影响较大的问题,本文提出一种基于粒子群优化-反向传播(Particle Swarm Optimization-Back Propagation,PSO-BP)神经网络模型的激光陀螺温度误差补偿方法,利用粒子群优化(Particle Swarm Optimization,PSO)算法优化反向传播(Back Propagation,BP)神经网络来提高模型预测的速度和精度,并验证了温补方案的有效性。
1 激光陀螺零偏预测模型
1.1 粒子群算法
PSO 算法是一种群体智能进化计算技术,它通过模拟鸟群觅食时的协同行为使粒子群以最短的时间寻得全局最优解[12,13]。在PSO 中,粒子代表的是每个优化问题的可能解。通过优化函数能够得到任意一个粒子的适应度值,而且每个粒子还具有确定粒子前进方向和距离的速度。随后,全体粒子就在解空间中跟随着最优粒子不断进行寻优,直至寻找到新的最优解[14]。
设在一个D维的搜索空间中,N个粒子组成一个群体,x为粒子的初始位置,v为粒子的“飞行”速度,p为搜索到粒子的最优位置。
第i个粒子是一个D维的向量

同样的,第i个粒子的“飞行”速度可记为

第i个粒子当前搜索到的最优位置,记为

粒子群当前搜索到的最优位置,记为

当在寻找到pbest和gbest时,粒子根据下面的两个公式对自身的速度和位置分别进行更新:

式中,ω称为惯性因子,代表先验值所占的权重,ω取值较大时,全局搜索能力较强,ω取值较小时,局部搜索能力较强;c1、c2称为学习因子,一般取值为2;r1、r2为[0,1]之间的均匀随机数。
由于PSO 算法在寻优的过程中容易陷入局部最优解,因此需要采取自适应的方式随着寻优过程的进行对ω进行调整。线性递减的权重公式如下:

式(7)中,ω begin为初始时刻惯性权重,ω end为最后一次迭代时的惯性权重,k为当前迭代数,kmax为最大迭代次数。
1.2 BP 神经网络模型
BP 神经网络是一种对非线性可微函数按误差逆传播算法训练的多层前馈网络,由一个输入层、一个输出层及一个或多个隐含层构成,在同一层中各神经元之间相互独立。输入信号从输入层神经元。依次通过各个隐含层神经元,最后传递到输出层神经元。
正向传播过程中,每一层神经元只影响下一层神经元的结构,通过激活函数得到输出端的输出值。当输出值与理想输出值偏差较大或者不满足误差要求时,就要将误差信号转入反向传播过程对神经网络进行校正,不断地修改各层神经元的权值使得网络输出值逐渐逼近理想输出值,直到输出误差达到限定的水平。图1 给出了BP 神经网络模型结构图(以两输入一输出为例)。
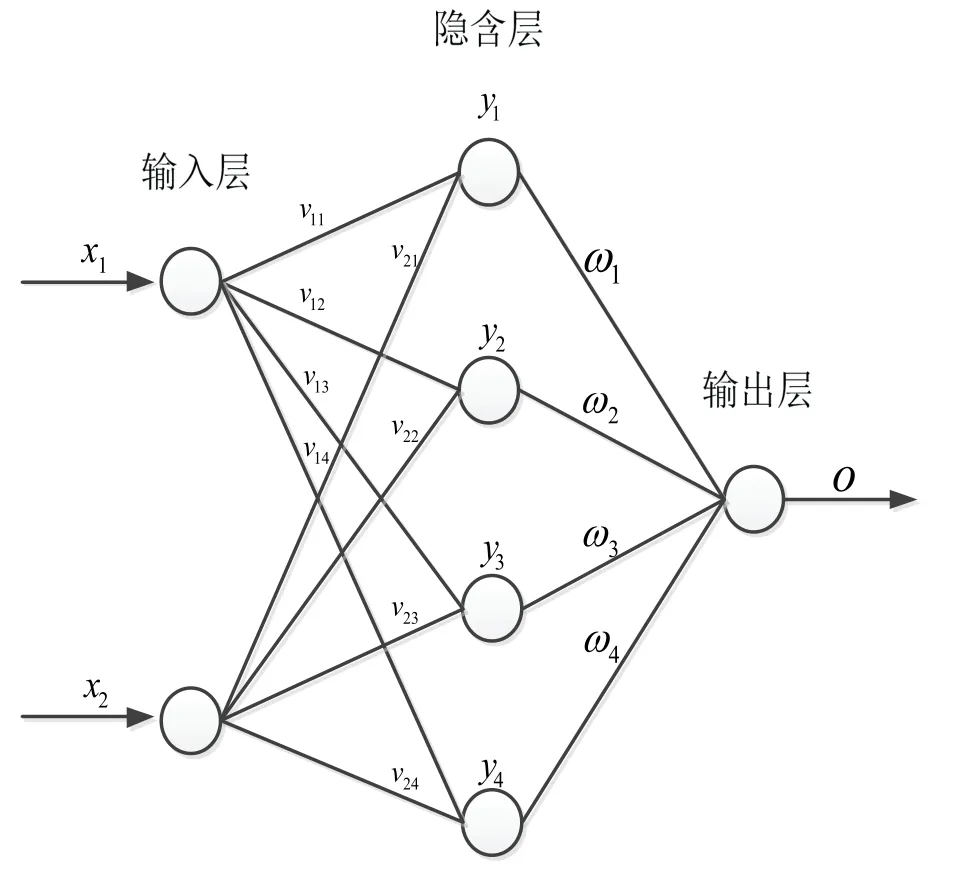
图1 BP 神经网络模型结构图Fig.1 BP neural network model structure diagram
在图1 所示神经网络结构中,输入数据为:
隐含层的输出向量为:

输入层神经元到隐含层的权值矩阵为:
隐含层到输出层的权值向量为:
隐含层的阈值为:

输出层的阈值为:

BP 神经网络在训练时,权值和阈值初始化时往往随机给出,为保证收敛性,网络学习率一般设置得相对较小,因此算法收敛速度较慢,迭代次数较高。另外,初始阈值和权值选取不当,BP 算法在训练时易陷入局部最小值,无法得到最优解。
为解决上述问题,本文采用全局搜索能力较强的PSO 算法对BP 神经网络初始阈值和权值进行全局寻优,避免算法陷入局部最优,提高网络的训练速度。
1.3 激光陀螺零偏PSO-BP 神经网络模型
采用PSO 算法对BP 神经网络的初始权值与阈值进行优化时,需要建立适应度函数评估寻优结果的好坏。本文以PSO 算法中每个粒子对应的BP 神经网络预测的陀螺零偏与实际采样得到的陀螺零偏数据之差的方差作为适应度值,通过PSO 算法循环迭代,得到使适应度值不断减小的全局最优解。适应度函数如下:

式(8)中,N为陀螺零偏数据总数,yi为实际陀螺零偏数据,为每个PSO 粒子代表的BP 神经网络预测的陀螺零偏数据。在PSO 寻优过程中不进行BP 网络的训练,利用PSO 算法本身迭代的过程不断获取更接近最优陀螺零偏BP 网络的权值与阈值,将PSO 获取的最优权值与阈值作为BP 网络进行训练的初值,从而达到经过简单训练得到最优网络结构的目的。
通过对激光惯组上电启动后的陀螺零偏温度特性分析可知,激光陀螺的零偏不仅与温度有关,同时也受到温度梯度的影响。与以往仅考虑单一变量的多项式温补模型不同,PSO-BP 算法以温度及温度梯度作为网络输入,以陀螺零偏采样数据作为目标对网络进行训练,能够更好地还原系统升温对陀螺零偏产生影响的过程。
PSO-BP 神经网络建立激光陀螺零偏网络模型的流程图如图2 所示,具体步骤如下:

图2 PSO-BP 神经网络算法流程图Fig.2 PSO-BP neural network algorithm flow chart
(1)对样本数据(输入:温度、温度梯度;训练目标:陀螺零偏)进行归一化处理。
(2)初步确定BP 神经网络的结构,设定隐含层和输出层的激活函数与成本函数。由于激光陀螺零偏受到温度及温度梯度影响,因此确定输入层为两个神经元、输出层为一个神经元;根据以往的研究结果,隐含层神经元个数一般为输入层的两倍,故取4 个。
(3)设置PSO 算法的种群粒子数和维数,确定迭代终止条件,对BP 神经网络的初始权值和阈值进行寻优。
(4)将PSO 寻优得到权值和阈值作为BP 神经网络的初始权值和阈值,同时关闭PSO 寻优过程,使用训练集进行网络训练,将训练后的网络相关参数保存。
(5)使用测试数据对BP 神经网络进行测试,并保存最优预测结果。
2 试验验证与结果分析
为了建立激光陀螺零偏的神经网络模型并验证PSO-BP 温补方案的有效性,分别对实验室某型激光捷联惯组进行高低温环境试验和常温下冷启动的静态漂移试验。
2.1 高低温环境试验设计
温度补偿试验一般分为温度稳定段和温度变化段,温度稳定段通过设定温箱温度点来实现,温度变化段则通过产品上电之后内部环境温升过程来实现,从而能够体现温度恒定和温度变化过程,满足建模需要且更符合惯导实际应用工况。
试验共设置6 个温度稳定点,温度值分别为:-10 C°、7 C°、19 C°、32 C°、45 C°、58 C°,将带工装的惯组放置在温箱内,在每一温度点下温箱到温后保温5 h,保温结束后惯组上电采样陀螺由上电至零偏稳定数据,待惯组内部环境温度达到下一温度稳定点时断电,重复至最后一个温度点试验结束。
2.2 高低温环境试验结果
试验完成后,可以得到6 组不同温度点下的激光陀螺静漂数据,采用PSO 算法对BP 网络的初始权值和阈值寻优结果如表1-2 所示。

表1 权值寻优结果Tab.1 Weight optimization results
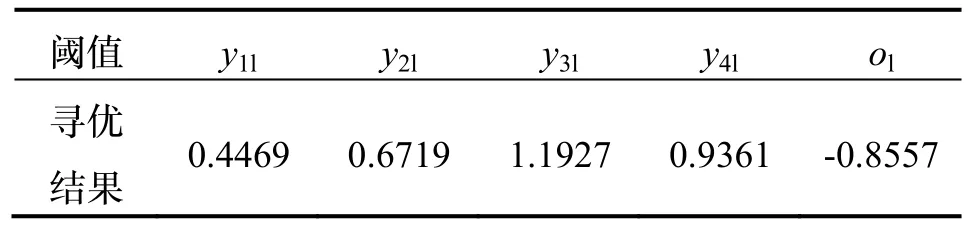
表2 阈值寻优结果Tab.2 Threshold optimization results
将表1-2 中PSO 寻优得到的最优权值和阈值设置到BP 神经网络初始参数中,取前四个温度点的陀螺数据对网络进行训练,得到零偏数据的预测曲线。再利用后两个温度点的陀螺数据对神经网络模型进行验证。BP 神经网络及PSO-BP 神经网络拟合结果如图3所示,验证结果如图4 所示。

图3 BP 及PSO-BP 神经网络预测曲线Fig.3 BP and PSO-BP neural network prediction curve

图4 BP 及PSO-BP 神经网络验证曲线Fig.4 BP and PSO-BP neural network verification curve
由图3 可知,4 组采样数据对应试验设置的4 个温度点存在4 个“台阶”,对于常规的多项式拟合算法而言,为保证模型精度需要将数据分成4 段进行分段拟合,方法较为繁琐,且一旦陀螺重复启动数据发生变化,温补的精度会迅速下降。BP 神经网络算法将采样数据视为一个整体,通过训练网络中的神经元、不断修正神经元的权值与阈值实现对原始数据的最优估计,拟合效果更好且算法对零偏启动重复性数据波动的容忍度更强。然而由图4 可知,利用温箱45° C 及58 °C 环境下采样得到的陀螺零偏数据检验BP神经网络模型时,出现了过拟合问题。PSO-BP 神经网络算法则在整个温度区间建立了陀螺的网络模型,利用PSO 算法避免了网络在训练时陷入局部最优解,经过简单训练即可得到陀螺零偏神经网络模型的最优解,且不会出现模型过拟合的情况。
为了检验PSO-BP 神经网络算法对网络训练过程优化的效果,分别对PSO-BP 算法和BP 算法进行50次蒙特卡洛试验。取5 次建立神经网络模型算法耗时对比试验结果如表3 所示。
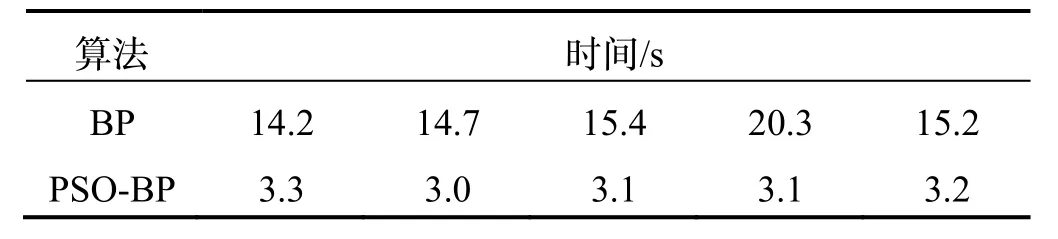
表3 算法耗时对比Tab.3 Algorithm time-consuming comparison
由表3 可知,BP 神经网络算法的计算时间较长且波动较大,主要因为算法本身易陷入局部最优,满足精度条件的训练次数不稳定。由于经过PSO 算法优化后的BP 神经网络权值与阈值已经接近陀螺零偏的最优网络模型,PSO-BP 算法建模的时间显著低于BP 算法,且每次建模时间相近,有效提高了神经网络模型的训练效率和精度。
将采样得到的陀螺静漂数据分别用分段多项式拟合法、BP 神经网络算法和PSO-BP 神经网络算法进行温度误差补偿处理,三种方法补偿结果对比如图5-6所示。
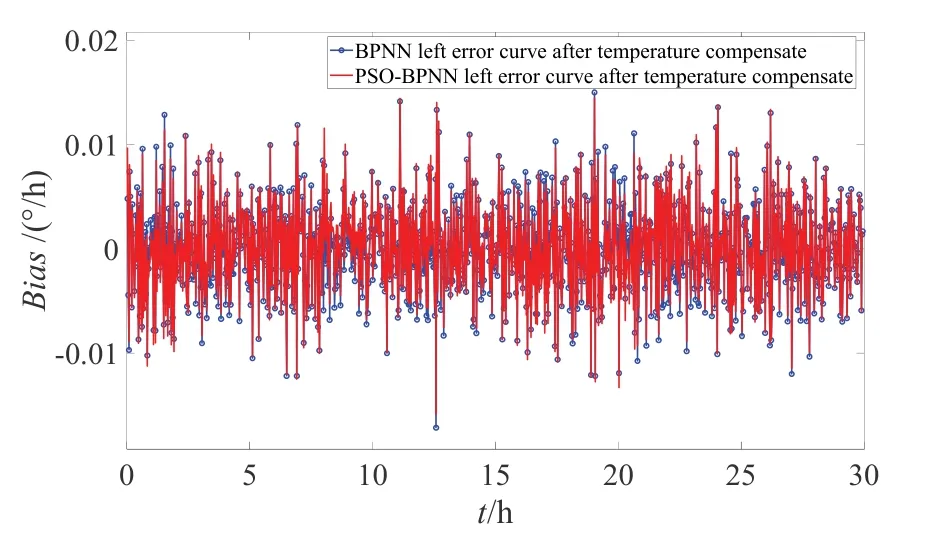
图5 BP 与PSO-BP 算法温补结果对比Fig.5 BP and PSO-BP algorithms temperature compensation results comparison
由于PSO-BP 神经网络模型精度高于BP 神经网络,由图5 可知,经过PSO 算法优化初始权重和阈值后的PSO-BP 神经网络温补残差波动幅度略小于BP神经网络温补的结果。由图6 可知,PSO-BP 算法温补后残差曲线的波动程度明显低于分段多项式温补残差。综合计算结果,采用多项式分段拟合方式得到的温补残差的百秒方差为0.0054 °/h,BP 算法拟合温补后残差百秒方差结果为0.0046 °/h,PSO-BP 拟合进行温补的残差百秒方差结果为0.0045 °/h 。PSOP-BP 算法既保证了高计算速度又具有更高的模型精度,有效提升了激光陀螺启动时的零偏稳定性。
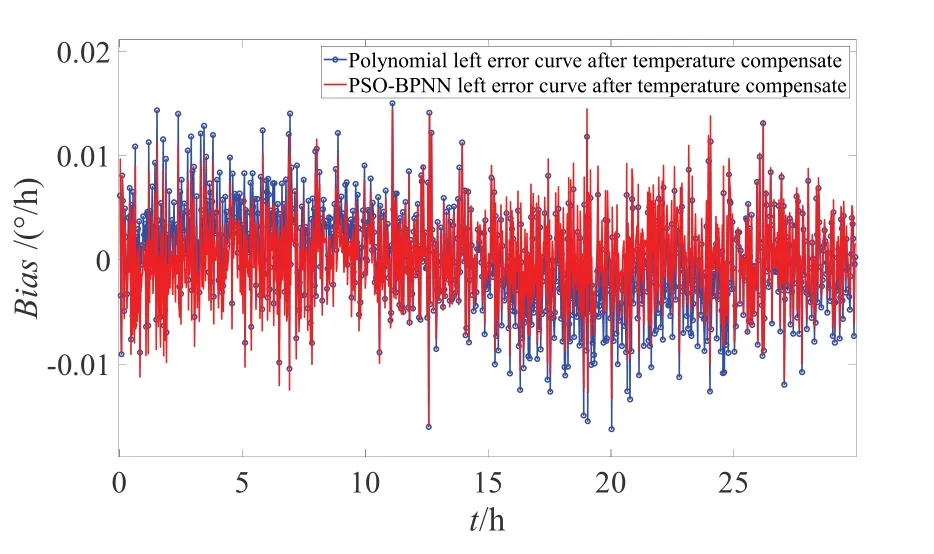
图6 多项式与PSO-BP 算法温补结果对比Fig.6 Polynomial and PSO-BP algorithms temperature compensation results comparison
2.3 验证过程
随着多核DSP 芯片应用到惯组产品中,可以在惯导系统中实现简单的神经网络运算。将BP-PSO 算法训练得到的激光陀螺零偏神经网络模型烧写到系统中,进行常温下静态漂移试验。
试验内容为:惯组安装在工装内,放置于温箱内的平板上;温箱分别在-10 °C、7 °C 和19 C° 保温5 h,并在各个温度点保温5 h 后给惯组上电采集陀螺1 h静漂数据,对比温补前后陀螺零偏的输出曲线;3 天后再做一次重复性试验,考核温补模型短期的有效性。实验结果如图7-8 所示。

图7 静漂实验陀螺零偏温补前后对比Fig.7 Gyroscope bias before and after temperature compensation in static drift experiment
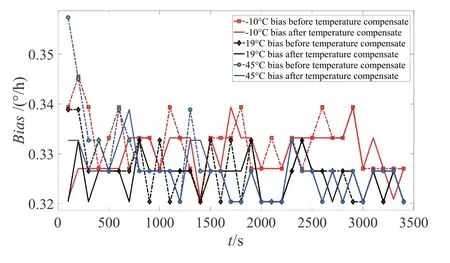
图8 三天后静漂实验陀螺零偏温补前后对比Fig.8 Gyroscope bias before and after temperature compensation in static drift experiment after three days
由图7-8 可知,温补前陀螺零偏达到稳定的时间为550 s;温补后的陀螺零偏数据在上电启动后基本稳定,没有温补前的明显变化趋势,经过温补后的激光陀螺上电启动后可以快速达到零偏稳定。零偏稳定性变化如表4、表5 所示。
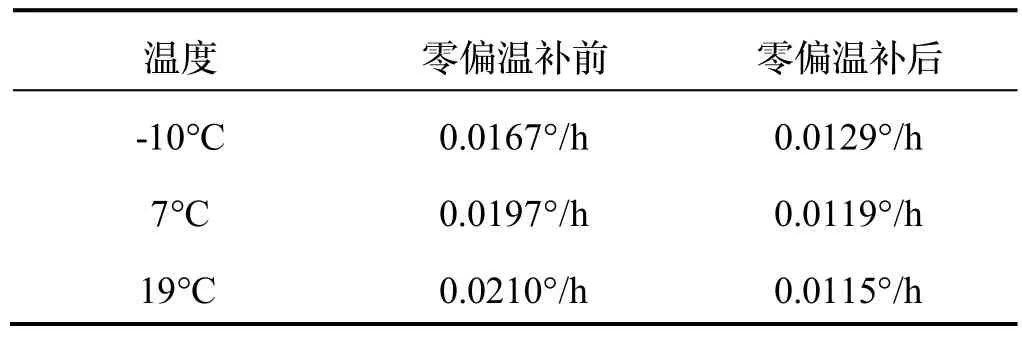
表4 温补前后零偏稳定性变化Tab.4 Change of bias stability before and after temperature compensation
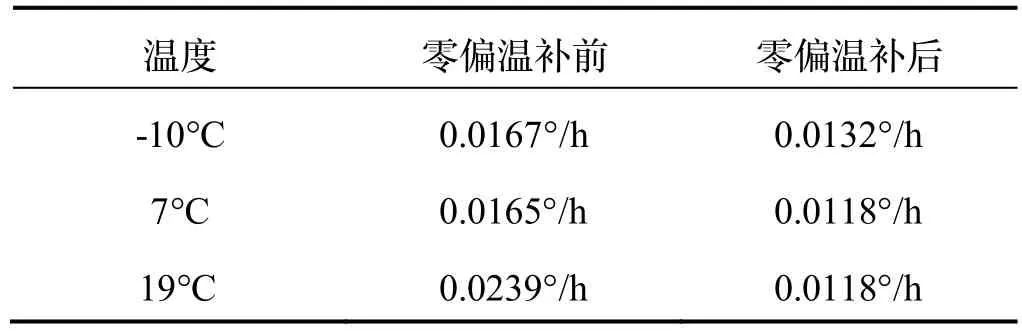
表5 三天后温补前后零偏稳定性变化Tab.5 Change of bias stability before and after temperature compensation after three days
表4-5 的结果表明,经过温补后的激光惯组零偏稳定性相比温补前提升了60%,且通过对比放置3 天前后的零偏稳定性数据可知,温补模型的补偿精度保持在千分级,精度指标满足工程应用要求,证明了补偿方法的有效性。
3 结论
本文利用PSO 算法优化了BP 神经网络,解决了传统BP 神经网络易陷入局部最优解及训练时间过长的问题,建立了激光陀螺零偏输出的实时温度误差补偿模型。试验结果表明,经过温度误差补偿后,惯组的启动快速性和零偏稳定性得到有效提升,且放置一段时间后的零偏变化量不超过0.006 °/h(3σ),补偿方法具有较高的适用性和工程应用价值。对于惯组处于翻滚状态时陀螺标度因数的温度特性,有待下一阶段继续进行研究。
猜你喜欢
成都信息工程大学学报(2022年3期)2022-07-21
沈阳师范大学学报(教育科学版)(2021年2期)2021-02-01
小学生学习指导(低年级)(2019年10期)2019-10-16
制造技术与机床(2019年9期)2019-09-10
学生天地(2019年6期)2019-03-07
军事文摘(2018年24期)2018-12-26
西南交通大学学报(2018年6期)2018-12-18
快乐语文(2018年36期)2018-03-12
河北遥感(2017年2期)2017-08-07
自动化学报(2017年7期)2017-04-18