冷原子干涉仪激光控制系统集成化设计及其在重力测量中的应用
2022-12-16 14:02陈玮婷孔德龙王杰英韦俊新赵小明
中国惯性技术学报 2022年5期
陈玮婷,孔德龙,2,裴 闯,王杰英,韦俊新,赵小明,2
(1.天津航海仪器研究所,天津 300131;2.中国船舶集团有限公司航海保障技术实验室,天津 300131)
近二十年来,随着光学技术的不断发展,基于激光操控碱金属原子物质波干涉的冷原子干涉测量技术快速发展。由于物质波干涉本身所具有的超高极限分辨力和良好的长期稳定性,冷原子干涉惯性测量技术逐渐成为研究热点[1-3]。其中,尤其以冷原子干涉重力测量技术的成熟度和应用前景最为理想,商品化、工程化的原子重力仪样机研制迫在眉睫[4-6]。
冷原子干涉仪从实验室原理样机转向工程应用需要解决两类问题:一是尺寸重量功耗(Size,weight and power,SWaP)的压缩,二是环境适应性和外场测量稳定性的提升。传统实验室样机通常采用两到三台激光器及配套激光控制系统,体积庞大,结构复杂,搬移、运输较为困难,使其应用场景受到一定制约;样机测量稳定性高度依赖于激光频率、功率、相位的稳定性,复杂外场条件下系统恢复过程繁琐,环境适应能力不足[7-9]。为解决工程化应用中的上述困难,基于激光边带调制技术的单激光器冷原子干涉技术逐步发展[10-13]。激光边带调制(Laser sideband modulation,LSM)技术使得光源系统得以简化,一定程度上促进了冷原子干涉仪的实用化进程,但激光控制系统的工程化目前尚处于起步阶段。冷原子干涉测量控制时序复杂,尤其是激光控制变量多、过程衔接紧,自动化、集成化、人机交互友好的激光控制系统研制不仅能够改善模块分立、控制离散等引起的SWaP 无谓增加,更有助于简化信号通路,减少干扰环节,提升系统快速启动能力、测量可靠性及可维修性。
本文从冷原子干涉仪的工程化应用实际出发,基于单激光器激光系统设计,提出了一套集成微处理单元(Integrated micro processing unit,IMPU)+分布执行单元(Distributed executing unit,DEU)子系统框架,在该框架下搭建了以现场可编程逻辑门阵列(Field Programmable Gate Array,FPGA)和直接数字频率合成器(Direct Digital Synthesis,DDS)为核心的激光控制系统,用于控制激光器分时复用输出包括冷却光、再泵浦光、吹走光、拉曼光、探测光等在内的所有冷原子干涉所需操控激光,且激光频率(相位)、功率和开关全程控在线可调。通过实验测试评估了所设计激光输出控制系统的性能,87Rb 原子自由下落式冷原子干涉实验和重力测量验证了所提方案的有效性。
1 冷原子干涉原理
冷原子干涉包括四个基本过程:一、冷却陷俘,通过施加梯度磁场、冷却光,使处于超高真空腔体内的自由扩散的原子速度降低至cm/s 量级,并囚禁于梯度磁场的势能低点处成为冷原子团;二、初态制备,在冷原子团自由下落的过程中,通过施加再泵浦光、偏置磁场、微波、拉曼光、吹走光,将原子态纯化到52S1/2,F=2,mF=0 态上;三、干涉,在原子继续自由下落的过程中,依次作用π/2、π、π/2 三对拉曼光脉冲,使原子在内态上依次发生分束、态反转、合束,在空间上依次发生双态原子运动分离、自由演化、双态原子汇合过程;四、探测,通过施加探测光和再泵浦光依次对F=2 态和F=1 态原子布居数进行测量,两个态上原子布居数随拉曼光频率啁啾率变化而变化,最终形成干涉条纹图样。
以87Rb 原子为例,整个冷原子干涉过程所需的冷却光、再泵浦光、吹走光、拉曼光、探测光频率由87Rb原子D2 线能级图确定,如图1 所示。
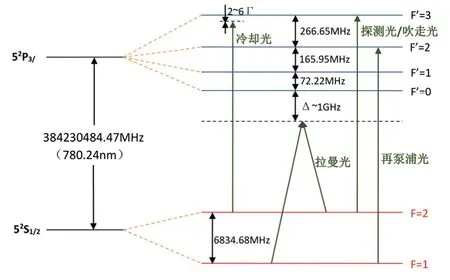
图1 87Rb 原子D2 线及所需激光频率示意图Fig.1 The energy level scheme of 87Rb D2 line and the required laser frequencies
2 激光系统方案
2.1 光路方案
根据冷原子干涉实验过程及图1 所示激光频率需求,设计单激光器激光系统光路方案如图2 所示。
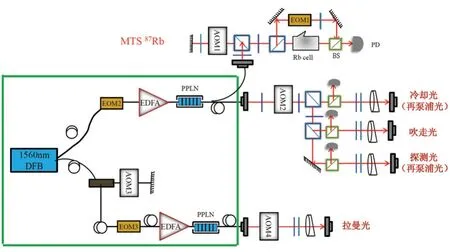
图2 单激光器冷原子干涉仪激光光路示意图Fig.2 Schematic diagram of the laser setup used in the cold atom interferometer
结合图2 所示光路设计,激光光路方案说明如下:
(1) 采用通信波段1560 nm光纤激光器作为种子源,种子源输出一分为二,分别经掺铒光纤放大器(EDFA)放大及周期性极化铌酸锂晶体(PPLN)倍频,获得两路780 nm 激光输出;其中一路用于激光器锁频,以及冷却光、再泵浦光、吹走光、探测光输出,另一路用于拉曼光输出。
(2) 采用调制转移光谱(Modulation Transfer Spectroscopy,MTS)对激光频率进行锁定,锁频频率设为F=2→F’=3 循环线,锁频光路输入激光双次穿过声光晶体调制器(Acousto-Optic Modulator,AOM)AOM1(中心频率CFAOM1=850 MHz),锁定后激光器原始输出激光频率相比于F=2→F’=3 共振跃迁频率正失谐170 MHz;改变AOM1 驱动频率,失谐频率也相应改变。
(3) 激光器原始输出通过 AOM2(中心频率CFAOM2=185 MHz)移频,分时复用输出冷却光、探测光和吹走光。
(4) 激光器电光调制器(Electro-optical Modulator,EOM )EOM2(中心频率CFEOM2=6583.03 MHz),施加调制获得边带激光,用于同时输出冷却光和再泵浦光,或同时输出探测光和再泵浦光。
(5) 激光器另一路原始输出双次穿过AOM3(中心频率CFAOM3=300 MHz)进行失谐频率调节,通过EOM3(中心频率CFEOM2=6834.68 MHz)调制获得边带激光,经AOM4(中心频率CFAOM1=220 MHz)二次移频后用于输出拉曼光。
2.2 集成控制方案
根据图2 所示光路设计,将冷原子干涉过程所需的各激光的频率、功率和开关控制全部通过光路AOM及EOM 的驱动信号频率(相位)、功率和开关控制实现,控制方案如表1 所示。

表1 冷原子干涉仪激光控制方案Tab.1 The laser control scheme used in the cold atom interferometer
根据表1 输出控制方案,设计搭建激光控制系统如图3 所示。
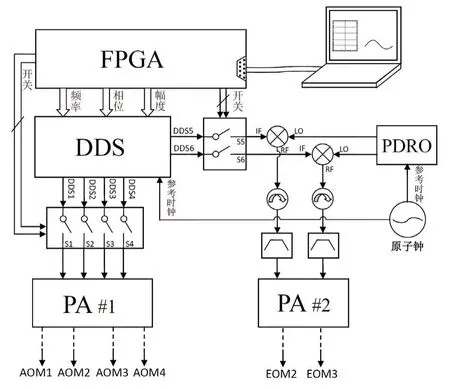
图3 激光控制系统原理框图Fig.3 Block diagram of the laser control unit
上位机软件采集用户设置的驱动配置参数,由通用异步收发传输器传输至微处理器FPGA,FPGA 通过串行外设接口对执行器件DDS 进行输出频率、相位、幅度和开关参数配置。AOM1~AOM4 的驱动信号频率在60~300 MHz 范围内可调,可由DDS 芯片直接输出获得,经射频功率放大(PA#1)后分别施加到各个 AOM。EOM2、EOM3 的驱动信号频率在6500~6900 MHz 的微波频段范围内,传统DDS 芯片难以直接输出该频段信号,故设计载波移频模块,原理组成如下:(1)采用原子钟同步DDS 与介质锁相振荡器(PDRO)的参考时钟,保证全系统同源;(2)将DDS 和PDRO 的输出信号分别输入到混频器的IF 端和LO 端,混频器的RF 端输出以PDRO 输出本振频率为中心的上边带(和频)和下边带(差频)信号;(3)RF 端输出信号经过隔离器和带通滤波器消除本振频率及上边带频率,获得目标频率(下边带)输出。最终,通过微波功率放大(PA#2)后施加到各EOM作为驱动。
由上述原理可知,当输入到混频器IF 端的DDS信号频率在一定范围内(保证混频目标频率始终在带通滤波器通带范围内)发生变化时,经混频后施加到EOM 上的调制驱动信号频率也跟随变化;当输入到混频器IF 端的DDS 信号功率在一定范围内(满足混频器最低输入要求)发生变化时,经混频后施加到EOM上的调制驱动信号功率也将跟随变化;当输入到混频器IF 端的DDS 信号通过射频开关关断时,IF 端输入无法满足混频器最低输入要求,混频器的RF 端输出仅包含较低功率的原始本振信号,通过隔离器和带通滤波器后被完全滤除,无信号输出,从而实现了对EOM 调制驱动信号的关断。载波移频模块设计,使得EOM 调制驱动信号的频率、相位、功率、时序开关控制也可经由FPGA 对DDS 输出信号的频率、相位、幅度和开关参数配置来实现。
基于图3 所示设计,所有激光参数控制执行均通过FPGA 对各个DDS 的参数配置实现。以DDS 作为面向终端的分布式控制执行单元,硬件和软件设计模块化、可复用、易扩展、多通路性能一致性强,针对不同需求不同光学方案的匹配和可移植性大幅提升。以FPGA 作为集成微处理中心,控制集成度提升,信号流一致清晰,便于故障分析定位。
3 实验评估与重力测量实验验证
3.1 激光系统性能评估
为了验证所设计激光控制系统性能,进行了激光响应实验测试。混频本振输出频率为7 GHz,根据测量要求,分别采用通带范围为6500~6700 MHz 的隔离器和滤波器,获得EOM2 调制所需的覆盖冷却、探测过程的6568.03~6683.03 MHz 微波驱动信号输出,以及采用通带范围为6700~6900 MHz 的隔离器和滤波器,获得EOM3 调制所需的覆盖拉曼啁啾过程的6834.68±2αTMHz(其中,α为拉曼频率啁啾率,T为干涉脉冲间隔)微波驱动信号输出。最终,通过上位机实时配置DDS1~DDS6 的频率(相位)、幅度及开关参数,获得激光驱动信号输出。
首先,对驱动信号输出功率进行了测试。DDS 的输出功率由DDS 芯片内置幅度控制字控制,通过上位机发送至FPGA 的幅度参数,对DDS 幅度控制字进行配置,实现对满功率输出进行0~1 范围内不同幅度因子衰减。以DDS5 和DDS6 为例,分别在再泵浦光频率(CF=6583.03 MHz )和拉曼光频率(CF=6834.68 MHz)下测试了幅度因子在0.01~1 范围内变化时的DDS 芯片直接输出功率曲线,以及经微波信号发生模块后用于调制EOM2和EOM3的驱动信号功率曲线,如图4(a)(b)所示。

图4 射频驱动功率随DDS 幅度因子参数变化曲线Fig.4 The RF driving power vs the amplitude factor configuration of the DDS device
由图4 所示结果可以看出,通过上位机改变DDS5和DDS6 幅度因子,可将DDS 输出信号在约40 dB 范围内进行调节;相应地,测试得到经载波移频模块后,EOM2 和 EOM3的驱动功率分别在-14.31 dBm~24.9 dBm 及-12.33 dBm~26.45 dBm 范围内变化,EOM 调制驱动信号功率调节动态范围及功率变化趋势与DDS 自身动态范围及功率变化趋势基本一致。上述实验结果验证了通过上位机配置DDS 幅度因子参数对EOM 驱动功率进行调节的有效性。
接下来,分别在再泵浦光驱动频率(6583.03 MHz)和拉曼光驱动频率(6834.68 MHz)下,测试了EOM2 和EOM3 在不同调制驱动信号功率下的调制度响应变化曲线,如图5(a)(b)所示。其中,调制度定义为主激光与一级调制边带光功率之比。
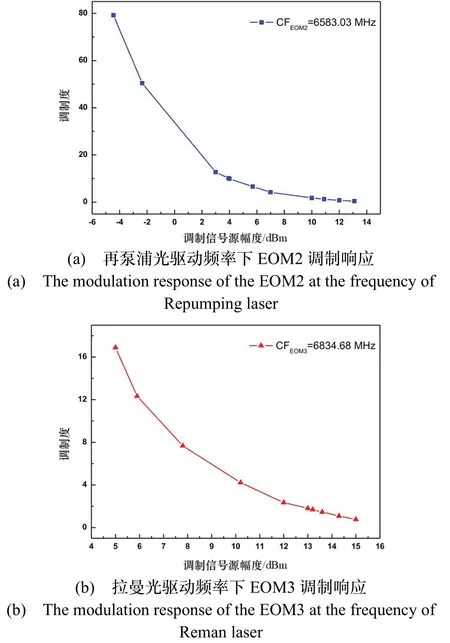
图5 EOM 调制响应曲线Fig.5 The modulation response curves of the EOMs
由测试结果可以看出,EOM 后端输出的主激光与+1 级调制边带光功率之比随调制驱动信号功率变化而呈单调变化;结合图4 所示功率测试曲线可知,通过改变DDS5 和DDS6 幅度因子参数来改变调制驱动信号功率,可以在较大跨度范围内实现主激光与调制边带光功率比的灵活调节,从而用于EOM2 和EOM3后端激光功率的调节。
AOM 驱动信号由DDS 输出信号直接功率放大而来,在功率放大器的线性工作区间内,增益为固定值,因而经功率放大后输入到AOM 驱动信号功率也可通过上位机配置DDS 幅度因子参数进行调节。我们以AOM4 为例,测试了在AOM4 工作频率(200 MHz)下,其后端+1 级衍射光的衍射效率随DDS4 驱动信号幅度因子变化曲线,如图6 所示。
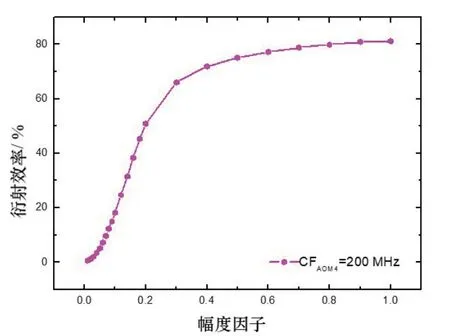
图6 AOM4 衍射效率随幅度因子变化曲线Fig.6 The diffraction efficiency of the AOM4 vs the amplitude factor configuration of the DDS device
由测试结果可以看出,AOM 后端+1 级衍射光的衍射效率随DDS4 的幅度因子参数变化而呈单调变化;改变DDS4 幅度因子参数可以在较大范围内对AOM4 衍射效率进行调节,从而用于AOM4 后端衍射激光功率的调节。
上述实验结果表明,对冷原子干涉过程所用各个操控激光功率的调节均可以通过上位机实时配置DDS 幅度因子参数来实现。基于DDS 参数配置的激光功率控制系统不仅能够提高激光系统调节灵活度和恢复效率,还能够进一步用于激光功率的闭环反馈控制,从而改善复杂外场环境下激光系统的稳定性。
接下来,对驱动信号的开关性能进行测试。通过射频开关控制DDS 输出信号通断,分别测量通、断状态下施加到AOM 及EOM 驱动端的驱动功率,测试结果如表2 所示。
由表2 所示结果可以看出,关断状态下,实际的AOM 驱动功率低于测试仪器的噪声本底,各驱动输出相比于满幅驱动功率衰减均在93 dB 以上,通过光功率计测量各个AOM 一级衍射光功率衰减在106倍量级,能够满足激光关断需求。类似地,关断状态下,实际的EOM 驱动功率也低于测试仪器的噪声本底,各驱动输出相比于满幅驱动功率衰减均在84 dB 以上,通过法布里-珀罗(FP)腔观测边带调制光均在测量仪器本底噪声以下,满足边带激光关断需求。上述结果符合预期设计。

表2 AOM 及EOM 驱动开关测试结果Tab.2 The results of the switch on-off tests on the AOM drivers and the EOM drivers
AOM 及EOM 的驱动频率控制,由DDS 输出频率控制字计算公式得到。DDS 从原理优势上支持频率捷变输出,这里不再对频率控制测试进行赘述。值得一提的是,除频率控制字外,DDS 芯片支持附加相位控制,采用相位控制字参数配置,实现任意相位捷变输出,尤其适用于拉曼光相位扫描、相位补偿等干涉过程的控制实现。
冷原子干涉过程中,拉曼光相位噪声的抖动将直接被原子所感知,表现两个态上原子布居数的抖动。因此,拉曼光相位噪声性能是冷原子干涉重力测量的关键,也是外场测量稳定性的核心考虑要素。针对这一问题,在拉曼光工作频率(6834.68 MHz)下,测试了通过EOM3 边带调制产生的拉曼光相位噪声,并将其与传统双激光器激光拍频锁相环路(Optical phase-locked loop,OPLL)产生的拉曼光相位噪声对比,测试结果如图7 所示。
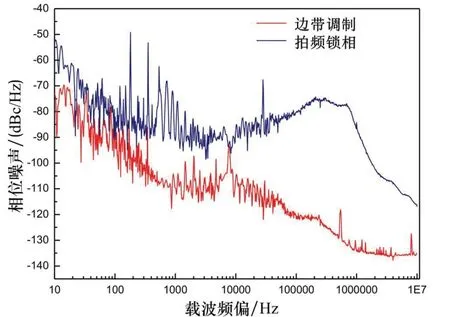
图7 拉曼光相位噪声性能测试结果Fig.7 The comparison results of the phase noise of the Raman beat notes generated by the proposed method
由图7 所示测试结果可以看出,所搭建的激光输出控制系统控制产生的拉曼光拍频相位噪声在全频带范围内优于传统OPLL 技术产生的拉曼光拍频相位噪声。上述结果证明了基于LSM 技术产生拉曼光的拍频相位噪声性能主要取决于调制驱动信号源的相位噪声性能,而基于OPLL 技术产生的拉曼光拍频相位噪声性能不仅依赖于锁相环路参考信号源的相位噪声性能,还高度依赖于锁相环路本身的噪声性能。在较低频偏范围内,基于OPLL 技术产生的拉曼光相位噪声趋近于环路参考信号源的噪声水平;从数百Hz 以上频偏处开始,基于OPLL 技术产生的拉曼光的相位噪声与边带调制产生拉曼光的相位噪声差距逐渐增大,说明此时锁相环路噪声成为主要制约因素,因而高质量拉曼光作用对锁相环路设计及参数整定提出较高要求[14-16]。
考虑实际的工程化应用,外场测量条件相对复杂,激光与环路状态不确定因素增多,最终表现为基于OPLL 技术产生的拉曼光相位噪声性能可能高度敏感外界测量条件。本文所搭建的激光输出控制系统通过DDS 载波移频模块产生拉曼光边带调制,充分利用了驱动参考源的相噪优势,尤其是DDS 器件本身的相噪优势,获得较好的拉曼光相位噪声性能,且对环境变化低敏感,因而更适合外场测量环境应用。
3.2 冷原子干涉重力测量
为了验证设计的激光控制系统性能,利用两套重力仪控制系统设计并开展了冷原子干涉重力测量实验,并将测量结果与传统基于OPLL 技术的双激光器控制系统样机测量结果进行对比,两套控制机柜实物图如图8 所示。

图8 双激光器激光拍频锁相控制机柜(左)与单激光器边带调制控制机柜(右)实物对比Fig.8 Photograph of the control cabinets based on the OPLL(left) and the LSM(right),respectively
根据表1 所示激光控制方案,冷原子(87Rb)干涉实验过程中的光学驱动控制时序如图9 所示。
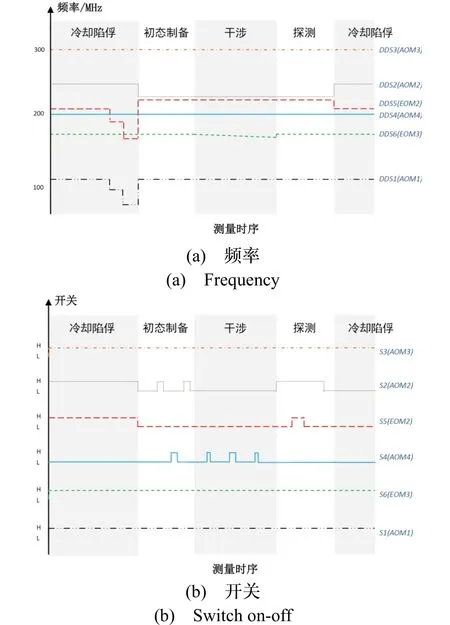
图9 冷原子(87Rb)干涉实验光学驱动控制时序Fig.9 Sequence chart of the laser driver control unit during the cold atom (87Rb) interference
根据冷原子干涉时序过程的激光控制需求,在冷却陷俘阶段,将DDS5 频率设置为416.97 MHz,幅度因子设置为0.083,获得冷却光与再泵浦光功率比为8.89:1;在干涉作用阶段,将 DDS6 频率设置为155.32 MHz,幅度度因子设置为0.175,实现拉曼光功率比1:1.66;在探测阶段,将DDS5 频率设置为431.97 MHz,幅度度因子设置为0.175,实现再泵浦光与探测光功率比60.42:1。
如图10所示为通过扫描FP腔采集得到的各EOM后端输出激光。可以看出,所设计的激光控制系统经过上述参数设置能够实现所需频率、功率的激光输出,用于冷原子干涉实验。进一步,通过动态配置DDS6频率参数,对EOM3 调制驱动频率进行线性扫描,实现拉曼频率啁啾。
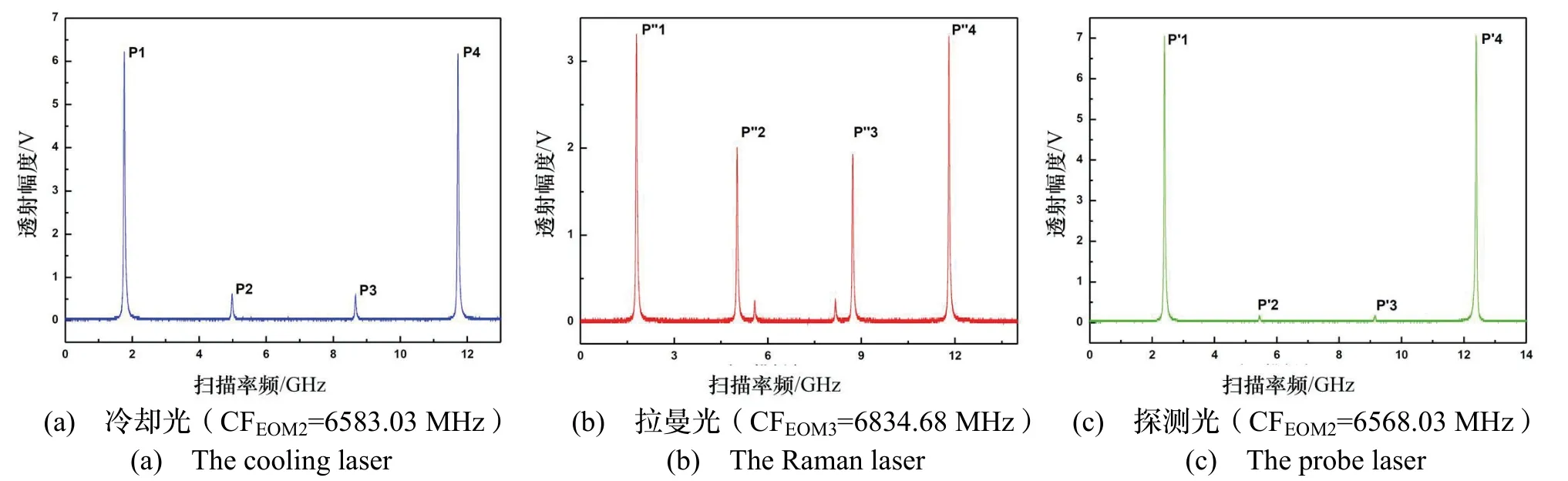
图10 冷原子干涉重力测量中各EOM 调制输出激光Fig.10 The modulation outputs of the EOMs in the cold atom interferometric gravity measurement
最后,所设计激光控制系统在上述参数配置下,开展冷原子干涉重力长期测量。如图11 所示为两套控制系统下的重力测量值与理论值(固体潮模型)对比结果,其中,每个测量点由300 s 数据获得,连续测量时间为41 h。
由图11 所示测量结果可见,两套控制系统下的重力测量结果经过潮汐修正后的残差波动基本在±20 μGal 水平。通过Allan 方差评估长期稳定性分别为5.0 μGal@1h 和4.3 μGal@1 h,如图12 所示。上述实验结果证明了所设计的激光控制系统与传统OPLL技术框架下的实验室样机性能相当,且充分发挥了单激光光源和集成控制优势,体积、重量、功耗分别为传统实验室样机机柜的1/3.6、1/1.9、1/1.6,最终使得控制机柜SWaP 降低至传统实验室样机的1/11。

图11 41 小时连续重力固体潮测量结果Fig.11 The results of the 41-hour measurement of earth tidal gravity
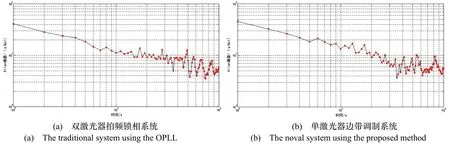
图12 重力测量Allan 方差评估Fig.12 Allan deviations of the measurements
4 结论
本文面向冷原子干涉仪的工程化应用,搭建了以FPGA 为集成微处理单元和DDS 为分布执行单元的单激光器激光控制系统,实现了仅通过对DDS 频率(相位)、功率、开关参数在线配置,即时完成冷原子干涉全过程的激光控制。控制系统构型简单、设计一致性强、可扩展、易复用、可维修性强的特征符合激光控制系统工程化设计的要求。
为了验证所搭建激光控制系统的功能,通过实验测试对不同驱动频率和功率控制下的激光边带调制、激光衍射效率、激光开关特性及拉曼光相位噪声分别进行了性能评估,在此基础上完成了冷原子干涉和重力测量实验验证。实验结果表明,本文所提出方案能够用于冷原子干涉仪激光输出控制,基于所搭建激光控制系统的冷原子干涉重力测量性能与传统OPLL 技术框架下的实验室样机性能相当,同时实现了SWaP的大幅改善。
此外,所提出方法能够实现激光频率(相位)、功率和开关全程控在线可调,提高了激光系统自动化控制水平,同时有助于改善拉曼光相位噪声环境敏感性,为复杂环境条件下激光反馈控制、系统稳定性及快速启动能力提升等奠定重要技术基础。本文所发展的激光控制系统有助于推动冷原子干涉仪的工程化及其在重力测量方面的应用。
猜你喜欢
少儿科学周刊·儿童版(2021年22期)2021-12-11
少儿科学周刊·儿童版(2021年22期)2021-12-11
少儿科学周刊·儿童版(2021年22期)2021-12-11
辽宁省博物馆馆刊(2021年0期)2021-07-23
数学年刊A辑(中文版)(2020年3期)2020-10-27
中学生数理化·八年级物理人教版(2017年9期)2017-12-20
原子与分子物理学报(2015年3期)2015-11-24
原子与分子物理学报(2015年1期)2015-11-24
噪声与振动控制(2015年4期)2015-01-01
振动、测试与诊断(2014年4期)2014-03-01