检测信号非线性引起的全角半球谐振陀螺漂移模型
2022-12-16 14:02徐睿东郜中星南方伯韩莹冰张勇刚
中国惯性技术学报 2022年5期
徐睿东,郜中星,南方伯,韩莹冰,张勇刚
(1.哈尔滨工程大学智能科学与工程学院,哈尔滨 150001;2.青岛哈尔滨工程大学创新发展中心,青岛 266000)
半球谐振陀螺(Hemispherical Resonator Gyro,HRG)凭借其在高精度、高可靠性和抗辐射等方面的突出优势,被广泛应用于军用领域和民用领域。半球谐振陀螺具有两种工作模式,分别为力平衡模式(Force-To-Rebalance,FTR)和全角模式(Whole-Angle,WA)。其中,力平衡模式具有检测精度高的特点,但受限于控制器抑制驻波进动的能力,仅仅适用于动态测量范围较窄的应用场景。全角模式下驻波能够自由进动,陀螺具有无限大的带宽和动态测量范围,因此有着广阔的发展前景[1-4]。
然而,受到制备工艺的限制,在加工和装配半球谐振陀螺的过程中会引入如:阻尼各向异性、刚度各向异性、电极装配误差等多种非理想因素。为了提升陀螺的性能指标,国内外学者对于HRG 的误差机理进行了多角度的分析研究,并分别提出了误差抑制与补偿方法。郭锞琛等提出了基于电阻热耗散原理的阻尼不对称修调方法。然而,由于修调系统中存在干扰阻尼修调的非线性项,因此该方法不适用于振幅较大的谐振陀螺[1]。Z.X.Hu 等研究了速率积分陀螺中存在的多种非线性误差因素,仿真并分析了多种非线性误差源整体对于陀螺仪控制系统以及角度漂移的影响,但是没有单独分析每一种非线性误差源对于陀螺输出的影响[2]。宁友欢等研究了装配倾角误差能够导致半球谐振子刚度在周向角度上呈正弦规律变化进而引起频率裂解的问题。研究结果表明,当刚度变化0.05%时,可引起1 Hz 的频率裂解[3]。张勇猛等给出了由检测电极装配误差引起的电增益不一致可导致角度漂移在周向角度上呈周期性变化的结论[4]。
与上述误差源不同的是,由电容变间距检测方法导致检测信号产生非线性失真(以下简称为:检测信号非线性)进而引起的全角半球谐振陀螺漂移并不是由加工或装配非理想造成的,而是由于系统自身特性产生的误差,因此只能通过补偿且很难利用修调等物理手段消除。综上所述,针对检测信号非线性进行详细的分析,对于明晰陀螺漂移的产生机理,探索漂移的补偿方法以及提升陀螺的整体性能都具有重要意义。
本文针对电容变间距检测方法引起全角半球谐振陀螺漂移误差的问题开展研究,提出了一种用于描述这种角度漂移的数学模型。首先,本文给出了理想半球谐振子的运动学模型,阐明了电容变间距检测方法的工作原理以及检测信号中非线性项的来源;然后,介绍了全角半球谐振陀螺的控制系统,并根据驻波位置的解调原理逐步推导了检测信号中的非线性项对于角度解算的影响,进而提出了一种描述角度漂移的数学模型;随后,对陀螺进行了转台实验并对测试数据进行了频谱分析,结果表明在解算角速度的频谱图中存在四次谐波漂移和八次谐波漂移;最后,基于Simulink 工具箱搭建了全角半球谐振陀螺的多参数仿真平台,利用该仿真平台验证了检测信号非线性对于陀螺输出角度的影响。
1 半球谐振陀螺的电容变间距检测方法
1.1 半球谐振子的运动学模型
为了解耦分析电容变间距检测方法对于检测信号的影响,需要忽略阻尼误差、刚度误差、装配误差等非理想因素,仅给出理想半球谐振子在笛卡尔坐标系下的运动方程[5,6]。
式(1)中,x和y分别为半球谐振子在x模态和y模态上振动的位移。τ为阻尼时间常数,ω为谐振角频率,Ω 为外界输入转速,γ≈0.27为振型进动因子,n=2为振型阶数。
半球谐振子的二阶振型如图1 所示,在科氏力的作用下,驻波以γ-Ω的角速度相对于半球谐振子进行反向进动。半球谐振子的运动方程在笛卡尔坐标系与椭圆坐标系间的坐标变换方程为[5,6]:

图1 半球谐振子边沿的运动轨迹Fig.1 Motion trajectory on the edge of hemispherical shell resonator
其中,a、q分别表示半球谐振子驻波的幅值信号和正交信号,θ表示半球谐振子的驻波方位角,φ表示等效质点运动的相位,θ0和φ0分别为驻波的初始方位角和初始相位。
1.2 电容变间距检测方法
半球谐振陀螺的电极分布如图2 所示,在谐振子周向上均匀地分布着八个电极板。其中,D1、D2 分别为两组差分驱动电极,通过施加驱动力来激励谐振子起振并维持驻波稳定。S1、S2 分别为两组差分检测电极,将半球谐振子的形变转化为可量测的电压信号。图2 中的八个电极板被固定在基座上,而半球谐振子通过金属化镀膜工艺在表面上附着了一层金属薄膜。电极板与其正对面积的金属薄膜形成了可变间距的电容器,电容值由介电常数ε、电极板正对面积S和极板间距d决定。其中,d=d0-x,d0为初始极板间距,x为极板随着半球谐振子形变产生的位移变化[7]。电容变间距检测方法如图2 所示。
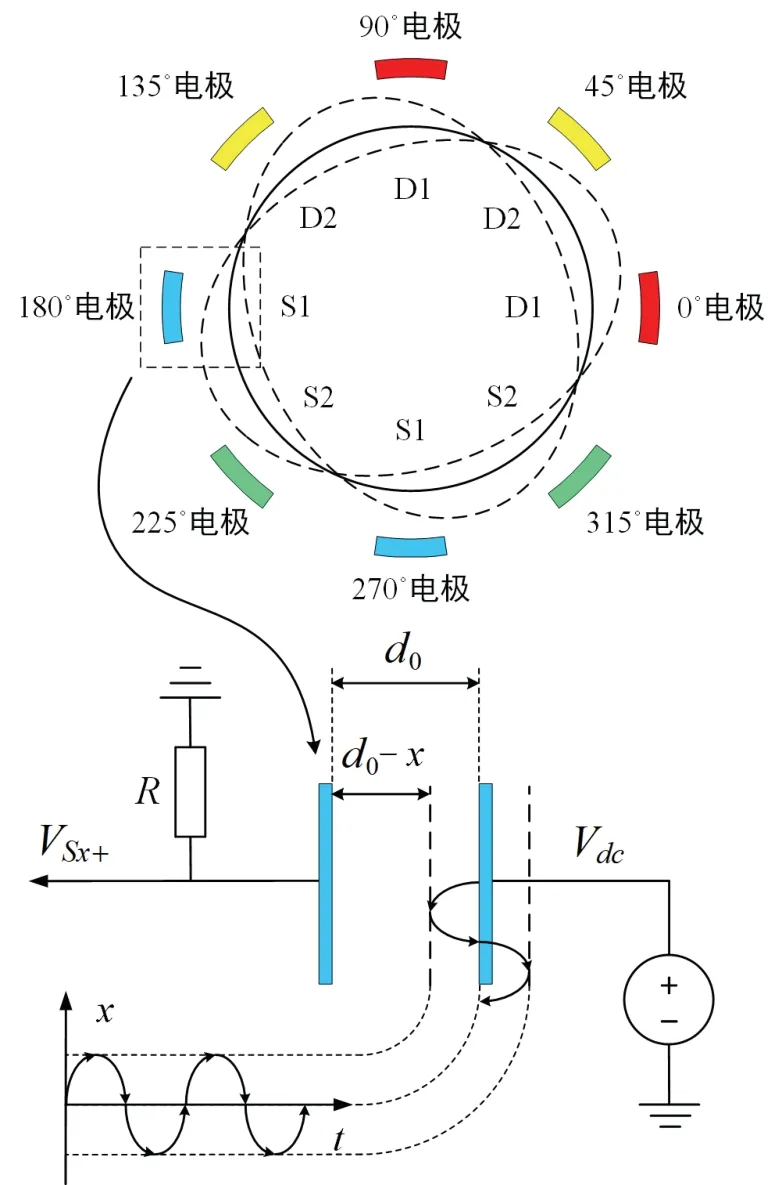
图2 半球谐振陀螺的电容变间距检测方法Fig.2 Variable gap detection method for the capacitor of HRG
与此同时,由于半球谐振子的驻波在机械角度间隔90 °的任意两个方向上具有完全相反的形变量,因此可以通过差分检测方法来减小信号传输过程中引入的共模干扰。式(3)给出了间隔90 °的两组差分检测电极上量测的电压检测信号VSx+、VSx-。

其中,V dc为直流偏置电压,C0为初始电容值,R为放大电阻值。为了分析检测信号中的非线性项,将式(3)进行泰勒展开。由于振幅过大会增加半球谐振子损坏的风险,通常令x≪d0,因此可以忽略泰勒展开式中高于三阶的余项[2],如式(4)所示。

差分检测信号VSx可表示为:
2 半球谐振陀螺工作原理与检测信号非线性分析
全角半球谐振陀螺的控制系统框图如图3 所示。在检测电极后端的模拟电路中依次使用了差分检测、跨阻放大、带通滤波等方法对检测信号VSx、VSy进行处理,以此提高检测信号的信噪比。将优化的检测信号通过模数信号转换模块转化为数字信号,再与参考信号Vrc、V rs进行乘法解调,分别通过IIR 低通滤波得到用于椭圆参数解算的信号:Cx、Sx、Cy、Sy。再通过椭圆参数解算方程分别得到半球谐振子驻波的椭圆参数:a、q、θ、δ[8]。其中a、q、δ分别应用于幅值控制回路、正交控制回路、相频控制回路。θ既是陀螺输出信号,同时也参与驱动信号的调制合成,来实现驱动力与驻波方位角的对准。
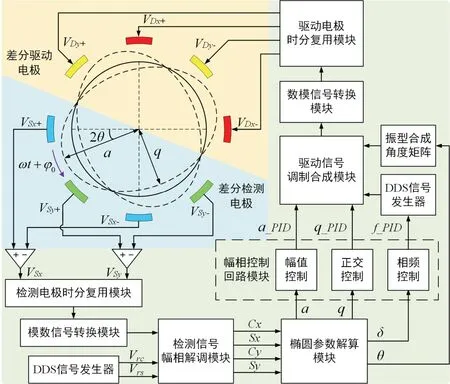
图3 全角半球谐振陀螺的控制系统框图Fig.3 Block diagram of HRG control system with WA mode operation
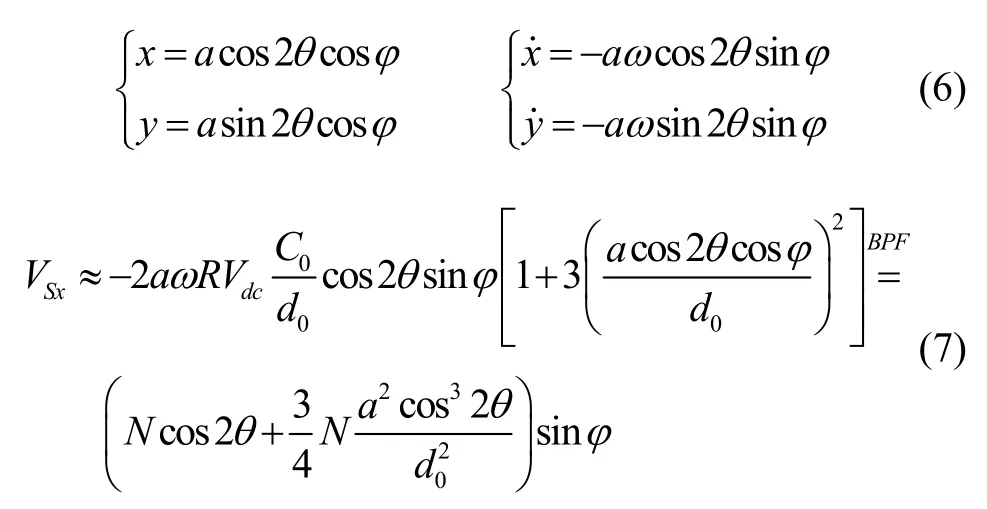
在幅值控制回路与正交控制回路的作用下,a≫q,因此可以将式(2)化简得到式(6)。随后,将式(6)代入式(5)中,得到经过带通滤波器(Band Pass Filter,BPF )后的检测信号如式(7) 所示,其中N=-2aω RVdcC0/d0。
同理,可得:

在相频控制回路的作用下,参考信号相对于检测信号具有固定的相位差。令:Vrc=Accos(φ-π/2),Vrs=Acsin(φ-π/2),Ac为参考信号幅值。解调后通过低通滤波器(Low Pass Filter,LPF)滤除谐振频率的二次谐波项,得到Cx、Sx、Cy、Sy,如式(9)所示。

其中,A=α2+αβ,B=α2+2αβ。
式(11)给出了解算角度θc与驻波方位角θ的关系表达式,式(12)给出了由检测信号非线性引起的角度漂移数学模型。

在式(12)中,=γ-Ω表示驻波转速,将A、B的展开式带入式(12)中进一步化简,如式(13)所示:

3 实验验证与仿真结果分析
陀螺正常工作时为了保证半球谐振子的安全,振幅间距比λ通常小于1/10。为了不失一般性,本文选择λ=7.45%。首先,给出当λ=7.45%时式(11)(12)的计算结果,如图4 所示:横坐标为驻波进动角度;红色线条对应右侧纵坐标,为解算角度θc;蓝色线条对应左侧纵坐标,为解算角速度。图4 表明,检测信号非线性引起了中的八次谐波漂移误差项。

图4 λ=7.45%时,解算角度 θ c与解算角速度在驻波进动角度上呈现周期性变化Fig.4 The periodic variations of θ cand within the standing wave precession angle as λ=7.45%
随后对陀螺进行了转台实验验证,实验装置包括单轴速率转台以及半球谐振陀螺,如图5 所示。通过转台为陀螺提供稳定的外界输入转速400 °/s,令驻波能够保持匀速进动。通过傅里叶变换的方法对测试数据进行频谱分析,并对幅值特性进行归一化处理,如图6 所示。

图5 转台实验装置Fig.5 The equipment for turntable experiment

图6 解算角速度的归一化频谱图Fig.6 The normalized frequency spectrogram of the calculation angular velocity
实验结果表明:在解算角速度的归一化频谱图中可以清晰地观测到四次谐波项和八次谐波项,八次谐波项归一化幅值为四次谐波项归一化幅值的14.52%。其中,四次谐波漂移误差[5]主要是由阻尼各向异性引起的,如式(16)所示。

八次谐波漂移误差则主要是由检测信号非线性引起的,如式(14)所示。为了验证所提出的检测信号非线性理论对于陀螺控制系统的影响,利用Simulink 工具箱搭建全角半球谐振陀螺的多参数仿真平台,如图7 所示。静电驱动模块包含了数模信号转换与高压放大电路;电容非线性检测模块包含了电容变间距检测与模数信号转换;信号解调模块、椭圆参数解算模块、信号调制模块分别对应了图3 中的检测信号幅相解调模块、椭圆参数解算模块以及驱动信号调制合成模块;理想半球谐振子模块包含了式(1)中的运动方程,排除了半球谐振子振动模型中的非理想因素,因此消去了解算中由阻尼各向异性和刚度各向异性引起的漂移误差[5,9]。表1 列出了应用于仿真模型的外界输入转速、理想半球谐振子的特征参数以及结构参数。图8(a)展示了当驻波转速为108 °/s而振幅间距比变化时,在周向角度上的解算角速度曲线。可知:当使用电容变间距检测方法时,中存在八次谐波误差项,并且A8th与λ呈正相关。由图8(b)可以得出如下结论:当不变时,A8th与λ呈高阶多项式正相关,与式(15)的趋势一致。由于电极初始间距d0保持不变,可以通过减小半球谐振子的振幅来削弱八次谐波误差。然而,振幅减小也会导致检测信号信噪比降低,同样不利于半球谐振陀螺精度的提高。因此,需要在后续研究过程中探索效果更好的补偿方法。

图7 全角半球谐振陀螺仿真模型Fig.7 Simulation model of HRG with WA mode operation

图8 =108 °/s 时,振幅间距比不同的检测信号非线性对于解算角速度以及八次谐波幅值的影响Fig.8 The influence of nonlinear detection signal with different amplitude gap ratio on the calculation angular velocity and the amplitude of 8th harmonic as =108 °/s

表1 半球谐振陀螺仿真参数设置Tab.1 Simulation parameters of HRG
图9 中蓝色线条表示当λ=7.45%而驻波转速变化时,全角HRG 仿真模型的运行结果,红色线条表示当λ=7.45%而驻波转速变化时直接利用式(15)计算A8th的运算结果。由图9 可知:当λ不变时,A8th与驻波转速呈线性正相关;此外,HRG 仿真模型的运行结果与式(15)的计算结果基本一致,其中存在计算误差的原因在于:在式(10)的化简过程中忽略了系数为2β的极小谐波误差项。综上所述,通过式(15)可以直接计算八次谐波误差项的幅值,同时也为八次谐波误差的补偿提供了理论支持。

图9 λ=7.45%时,驻波转速对于八次谐波幅值的线性影响Fig.9 Linear influence of standing wave precession velocity on the amplitude of 8th harmonic as λ=7.45%
4 结论
本文分析了在理想半球谐振子中,电容变间距检测方法引起的全角半球谐振陀螺角度漂移,并给出了相应的数学模型。随后分别对陀螺进行了转台实验验证以及Simulink 程序仿真,实验与仿真结果均表明:电容变间距检测方法会引起检测信号的非线性失真,进而导致解算角度中存在与周向角度八次谐波相关的漂移。进一步的仿真结果表明:此项漂移的幅值与振幅间距比呈高阶多项式正相关,与驻波转速呈线性正相关。下一步的工作将会利用单轴速率转台采集陀螺输出的数据集对八次谐波漂移进行实时校准与补偿。
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
数学年刊A辑(中文版)(2021年1期)2021-06-09
佳木斯大学学报(自然科学版)(2020年3期)2020-10-26
四川师范大学学报(自然科学版)(2020年1期)2020-07-05
中国惯性技术学报(2019年1期)2019-05-21
纤维复合材料(2018年2期)2018-12-07
中国化肥信息(2016年33期)2016-05-17
西部广播电视(2015年9期)2016-01-18
振动、测试与诊断(2014年6期)2014-03-01
原子与分子物理学报(2014年4期)2014-02-28