
智能车辆局部路径规划算法研究综述
2022-12-28 12:37马晓录李如意吴立辉
汽车实用技术 2022年23期
马晓录,李如意,吴立辉
智能车辆局部路径规划算法研究综述
马晓录,李如意*,吴立辉
(河南工业大学 机电工程学院,河南 郑州 450001)
为提高智能车辆行驶的平稳性和合理性,文章对近年来智能车辆常用的局部路径规划算法进行了分类和总结。首先对各类传统算法的原理进行了阐述,分析其优缺点,并指出传统算法在智能车辆上应用时的不足;其次整理分析了各类传统算法应用至智能车辆上时各学者所提出的改进算法;最后提出基于离散优化的算法是未来智能车辆局部路径规划的应用趋势,多算法融合是复杂场景下智能车辆局部路径规划的研究方向。文章的研究结果为智能车领域的研究人员在选择局部路径规划算法时提供参考。
智能车辆;路径规划算法;局部路径规划;离散优化;多算法融合
随着自动驾驶技术的兴起,智能车辆的路径规划问题越来越受到重视。路径规划可分为全局路径规划和局部路径规划。全局路径规划器在全局地图内按照一定的评估准则规划一条从初始点到目标点的全局路径,该路径不随环境或车辆运动状态变化而发生变化[1]。当车辆沿着全局路径行驶时,局部路径规划器以全局路径为参考,根据实时的环境信息生成一条短期路径,以达到避障和调整位姿的效果,该路径随着环境的变化而变化,称为局部路径[2]。局部路径规划起到修饰全局路径的作用,在满足车辆运动学、动力学等约束的条件下为车辆求解出一条最优路径。因此,选择合适的局部路径规划算法,对提高智能车辆行驶的平稳性和合理性至关重要。
目前智能车辆常用的局部路径规划算法可分为基于势场的算法、基于图搜索的算法、基于随机采样的算法和基于离散优化的算法。本文从搜索效率、寻优能力、约束条件、轨迹平滑性等方面分析了它们的优缺点,并整理分析了各学者将传统算法应用至智能车辆上时所提出的改进算法,为今后该领域的研究人员提供参考。
1 局部路径规划算法
1.1 基于势场的算法
KHATIB最早提出了基于势场概念的人工势场(Artificial Potential Field, APF)算法,当时主要用于解决机械臂和机器人的动态避障问题[3]。APF算法无需对全局路径进行搜索,计算代价小,规划效率高,便于底层实时控制,近年来在智能车辆上得到了广泛应用。APF算法的基本思想是将车辆在空间中的运动虚拟成一个质点在虚拟势场中的受力运动,如图1所示,目标点对车辆产生引力场,引导车辆朝向其运动,障碍物对车辆产生斥力场,避免物体与之发生碰撞,车辆在引力场和斥力场的共同作用下朝着目标点运动[4]。当车辆所受引力与斥力大小相等、方向相反时,所受合力为零,此时车辆陷入局部极小值点。目标点是整个势场中的全局极小值点,然而复杂势场中除了目标点以外的其他局部区域内也存在极小值点,将导致车辆在到达目标点之前就停止在局部极小值点[5]。
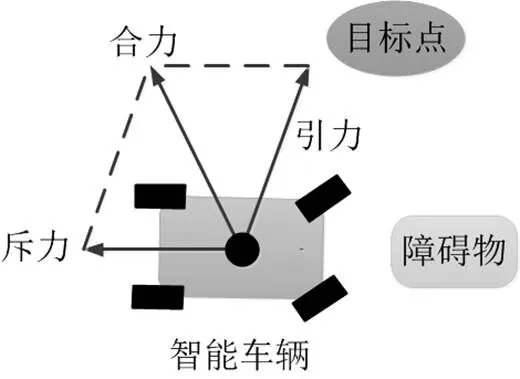
图1 传统APF算法原理图
将APF算法应用至车辆上时,不仅要考虑势场函数建模的合理性,还要考虑车辆本身运动的复杂性。智能车辆在行驶的过程中,一方面受到道路边界的约束,另一方面受到车辆自身的约束。然而传统的APF算法中,车辆的运动只受到引力和斥力的约束,并未考虑道路边界等各类约束条件,不适合结构化道路场景下的路径规划,车辆无法得到合理的路径,甚至规划失败[6]。为保证车辆满足各类约束条件,并顺利到达目标点,各学者对其展开了研究。修彩靖等[7]通过在斥力场中引入调节因子建立了改进的APF模型,消除了局部极小值点的现象;并基于高斯组合隶属函数建立了考虑运动学约束、动力学约束和障碍物约束的引力目标点函数,最后建立了道路边界约束模型,实现了智能车辆安全平稳的路径规划。安林芳等[8]提出了一种以避障换道思想构建障碍点模型的方法,同时结合车辆动力学和运动学约束,解决了目标不可达和局部最小值问题。吴乙万等[9]提出了一种基于动态虚拟障碍物的路径规划算法,在算法中加入动力学和运动学约束,解决了APF算法无法直接应用于智能车路径规划的问题。GU等[10]提出了APF-FC融合算法,利用模糊控制思想使车辆从局部极小值点逃离。RASEKHIPOUR等[11]提出了一种APF算法和模型预测控制(Model Predictive Control, MPC)器相结合的路径规划控制器,既能对不同的障碍物和道路结构分布不同的势函数,保证车辆遵守交通规则,又能利用车辆动力学来规划最优路径。
1.2 基于图搜索的算法
基于图搜索的方法依靠已知的环境地图信息构造从起点到终点的可行路径,主要包括Dijkstra、A*、D*、D* lite等算法。
Dijkstra算法是一种广度优先的状态空间搜索算法,算法从起始点开始计算相邻点与起始点的距离,将计算距离最近的点作为新的起始点再次计算相邻点与起始点的距离,逐层向外扩展,直到到达目标点。这种算法得到的路径最短,但大大增加了搜索数据量和计算时间[12]。A*算法是在Dijkstra算法基础上衍生而来的一种典型的启发式搜索算法,如图2所示,其通过建立节点估价函数来决定搜索方向,减少了盲目搜索的范围,其估价函数表达式为
()=()+() (1)
式中,()为节点的估价函数;()为在状态空间从初始节点到节点的实际代价,它决定了搜索范围,节点越多,搜索效率越低;()为从节点到目标节点最优路径的估计代价,()的取值有曼哈顿距离和欧几里得距离等。当估计代价等于实际代价时,搜索的节点恰好就是最优路径上的节点,搜索效率最高[13]。为提高搜索效率,马飞等[14]提出一种匹配运动轨迹的扩展节点方法。李琼琼等[15]在启发函数里引入搜索优先级信息。D*算法是在A*算法的基础上改进而来的动态路径搜索算法,D* lite算法是在D*算法的基础上提出的,其采用从目标点向当前点搜索的反向搜索方式。当车辆在行驶过程中遇到动态障碍物时,基于上次规划的路径信息的基础上再次搜索路径,从而避免对相同数据的重复计算,提高了重规划的效率[16]。

图2 传统A*算法曼哈顿距离搜索原理图
传统的图搜索算法应用至智能车辆作局部路径规划时,智能车辆被看作质点处理,未考虑车辆的非完整运动学约束和最大转向角,规划的路径是一系列线段的相互拼接,转折点较多,使得规划路径不能被底层控制模块很好地实现。针对图搜索算法存在的问题,DOLGOV等[17]提出一种满足车辆运动学约束的混合A*路径搜索算法,并采用数值优化方法对生成路径进行优化,车辆的运动轨迹接近全局最优。齐尧等[18]提出了一种共轭梯度下降法的路径后处理方法,保证车辆运动轨迹的平滑性。杨瑶等[19]在估价函数中引入方向代价和自适应障碍物惩罚代价,使用车辆最大转向角约束优化路径转折点,最后使用自由边界三次插值算法拟合转折点,使生成的路径符合智能车运动特性。田海波等[20]提出了一种考虑转弯成本并引入预判断规划策略和冗余拐点剔除策略的改进A*算法,生成的整体路径长度更短,拐点数量更少。辛煜等[21]提出了一种可沿任意方向搜索的改进A*算法,大大减少了路径中的转折点个数。刘晓涛等[22]提出了一种基于支持向量机(Support Vector Machine, SVM)算法的改进D*算法,利用SVM算法对车辆转向位置的局部路径进行平滑优化。DAKULOVIĆ等[23]提出了一种基于二维栅格占据地图的双向搜索D*算法,规划的路径比传统的D*算法更合理。FERGUSON等[24]提出了一种栅格内线性插值的改进D*lite算法,生成的路径点不局限于栅格中心点,线段之间的连接更为平滑。
1.3 基于随机采样的算法
基于随机采样的路径规划算法分为单查询算法和渐近最优算法,前者只要找到可行路径即可,侧重快速性,后者会对找到的路径进行优化,侧重最优性。常用的单查询算法有概率路图(Proba- bilistic Roadmap, PRM)、快速随机扩展树(Rapi- dly-exploring Random Trees, RRT)和RRT-Connect等算法,渐近最优算法有RRT*等算法。
传统的PRM算法分为离线学习阶段和查询阶段。离线学习阶段的主要内容是,在地图空间中随机采集一定数量的节点,之后每个采样点与其附近一定距离内的采样点连接,去除采样点间穿越障碍物区域的连接,形成路径网络图。查询阶段的主要内容是采用图搜索等算法寻找起点和目标点间的无碰撞路径[25]。采样点的数量决定了搜索到路径的概率大小,采样点的数量过少,可能无法完成路径搜索。邹善席等[26]在PRM算法中引入随机节点生成函数,取代落在障碍物中的采样节点,保证采样节点数量不变;并利用节点增强法对路径进行优化,缩短了整体路径长度,提高了路径的平滑度。
RRT算法是一种基于树结构的经典算法,如图3所示。算法流程为(1)初始化起点,终点,扩展树T={起点};(2)在自由空间中随机采样得到采样点rand;(3)从扩展树T中找到距离采样点rand最近的节点near;(4)计算near与rand之间的距离,若大于步长,则从near向rand移动后得到新的节点new,否则,在rand位置生成新的节点new;(5)若new和near之间存在直线通路,则将new加入扩展树T,其父节点为near;(6)循环上述步骤,直到加入扩展树T的节点new与终点间的距离小于一定阈值[27]。
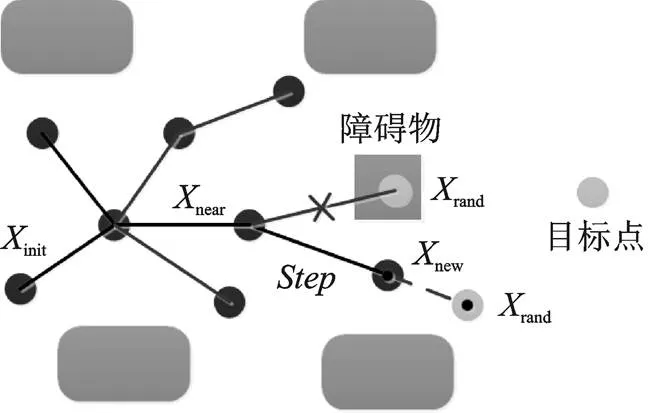
图3 传统RRT算法原理图
RRT算法以随机采样的方式获得无碰撞路径,不需要进行预处理,因此,搜索速度很快。同时该算法考虑了运动学约束和动力学约束,可用于智能车辆的路径规划,但还是存在一些不足:(1)由于算法的搜索侧重快速性,导致规划的路径不是最优的;(2)采样点缺乏导向机制,存在很多冗余搜索,影响算法的收敛速度;(3)采样的随机性导致采样点间跳动较大,甚至出现相邻采样点间的角度达到直角的现象[28]。
针对传统RRT算法的缺陷,学者们提出了不同的改进RRT算法。KARAMAN等[29]在RRT算法的基础上提出了渐进最优的RRT*算法。RRT*与RRT的算法流程基本相同,但节点new的父节点的选择策略不同。RRT*算法以节点new为圆心,在半径的邻域,选择路径代价最小的节点作为新的父节点,代替new,从而生成的路径较短,但未考虑节点间长度小于探索步长的问题。赵港[30]在RRT*算法中引入欧氏距离对次级节点的选择进行限制,避免因节点间距离过短而导致采样点间曲率变化大的现象。
为减少冗余搜索,提高搜索速度,KUFFNER等[31]提出RRT-Conect算法,该算法分别以起点和目标点为根节点生成两棵树进行双向搜索;宋晓琳等[31]在RRT算法中引入启发式搜索机制;TAHERI等[32]提出了一种基于模糊贪婪策略的改进RRT算法;ELBANHAWI等[33]提出了一种两阶段规划的RRT算法;ZUO等[34]将A*算法作为RRT算法的第一层几何路径规划。
为使规划路径能够满足车辆的运动学特性,宋晓琳等[28]建立道路约束模型,使随机采样点在期望路径模型上呈现高斯分布,最后采用三次B样条曲线拟合路径;ZUO等[34]采用最小二乘策略迭代算法对生成的路径进行优化。杜明博等[35]基于RRT算法框架提出了一种考虑车辆自身约束和环境约束的连续曲率RRT算法,同时基于最大曲率约束的后处理方法生成平滑的车辆轨迹;周维等[36]采用目标导向、修剪无用节点、五次多项式曲线拟合以及引入权重系数的联合策略得到满足车辆运动学约束的最优路径。
1.4 基于离散优化的算法
基于离散优化思想的路径规划算法是基于积分和微分等高等数学方法来描述车辆的行驶轨迹,从而生成一定数量的候选路径,最后根据不同的评价标准从候选路径中选择一条最优路径[37],如图4所示。这种方法得到的路径更优更合理,实时性较好,在智能车辆上得到了广泛应用[38]。
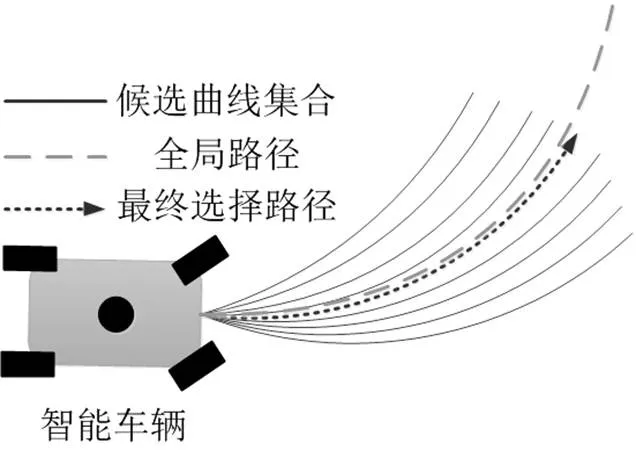
图4 基于离散优化的算法原理图
为满足智能车辆的各类约束,该类算法通常将车辆的运动解耦成多个子规划,实现车辆的纵横向规划或速度、转向角规划。姜岩等[39]提出一种基于运动微分约束的纵横向协同路径规划算法,利用高阶多项式模型在预瞄距离内对可行驶曲线进行建模,生成候选曲线集合。魏民祥等[40]利用Frenet坐标系将车辆运动解耦,构建以加速度变化率为核心的一维纵向、横向独立积分系统,通过5次、4次多项式分别求解得到有限的横向、纵向候选轨迹集合。陈成等[41]将车辆运动解耦成轨迹规划和速度规划,提出一种基于四阶贝塞尔曲线的轨迹规划方法。张琳[42]等提出了一种基于滚动窗口优化的车辆轨迹生成方法,采用启发式搜索获得满足约束条件的目标候选轨迹。ZHANG等[43]提出一种分层式轨迹规划方法,第一层生成不考虑运动学约束的最短路径,第二层基于多相位状态采样方法,在最短路径的附近进行采样,生成运动学可行的路径集合。
为从候选曲线中选择最优曲线,各学者提出了不同的选择方法。姜岩等[39]通过碰撞安全性分析选择一条曲线作为跟随或超车场景下的待执行曲线。魏民祥等[40]基于高斯卷积、加速度变化率分别构建损失函数来评价候选轨迹的安全性和舒适性,损失函数中各加权项和加权系数共同决定最优轨迹的选择。陈成等[41]采用序列二次规划算法求解得到最优运动轨迹。张琳等[42]引入度量函数决策出当前窗口下局部最优轨迹。ZHANG等[43]基于无导数平滑算法对路径进行平滑,为多相位状态采样避障提供正确引导信息。RÖSMANN等[44]通过调节各类软约束所占权重来获得期望的车辆运动轨迹。周慧子等[45]提出一种考虑安全性、舒适性、连续性的代价函数,从候选路径中选择代价函数最小的路径作为行驶路径。
2 总结与展望
本文总结了目前智能车辆常用的局部路径规划算法,并具体分析了不同算法之间的优缺点,可获得以下结论:
(1)基于势场法的算法计算代价小、规划效率高,但容易陷入局部极小值点;基于图搜索的算法规划的路径最短,但搜索时间长;基于随机采样的算法搜索速度快,但路径不是最优的;基于离散优化的算法在候选曲线集合中选择最优的路径,得到的路径更合理,但存在大量的复杂数学运算,实时性有待进一步提高。这些传统算法有一个共性问题,对道路环境、交通规则、非完整运动学、运动学以及动力学等约束没有考虑或约束不足。
(2)为保证车辆满足各类约束条件,目前的解决方法可分为两类,一是在搜索函数里配置各类约束信息,二是采用数学方法或结合其他算法的优势对生成的路径进行处理和优化。基于离散优化的算法将车辆运动解耦,分层式规划,既考虑约束条件,又基于数学方法或其他算法优化候选路径曲线,得到的路径更为合理。因此,基于离散优化的算法将是未来智能车辆局部路径规划的应用趋势。
(3)当空间的纬度、障碍物的密度以及车辆的行驶速度增加时,计算复杂度和计算时间将呈指数级增加,仅仅靠单一的算法不能满足需求,将多种算法的优点进行融合,将是未来该研究领域的热点与难点。同时,车辆的底层控制算法决定了车辆的规划轨迹和实际行驶轨迹之间的误差大小,因此,如何协调好路径规划算法和底层控制算法之间的关系也是研究的难点。
[1] 郑凯林,韩宝玲,王新达.基于改进TEB算法的阿克曼机器人运动规划系统[J].科学技术与工程,2020,20 (10):3997-4003.
[2] 彭晓燕,谢浩,黄晶.无人驾驶汽车局部路径规划算法研究[J].汽车工程,2020,42(1):1-10.
[3] KHATIB O.Real-time Obstacle Avoidance System for Manipulators and Mobile Robots[J].The Interna- tional Journal of Robotics Research,1986,5(1):90-98.
[4] 余政.基于改进人工势场法的智能汽车超车轨迹规划策略[J].农业装备与车辆工程,2021,59(9):64-68.
[5] 朱毅,张涛,宋靖雁.未知环境下势场法路径规划的局部极小问题研究[J].自动化学报,2010,36(8):1122-1130.
[6] 陈宇珂,林棻,王少博.基于障碍物势场和模型预测的车辆避障路径规划[J].重庆理工大学学报(自然科学), 2020,34(10):34-41.
[7] 修彩靖,陈慧.基于改进人工势场法的无人驾驶车辆局部路径规划的研究[J].汽车工程,2013,35(9):808- 811.
[8] 安林芳,陈涛,成艾国,等.基于人工势场算法的智能车辆路径规划仿真[J].汽车工程,2017,39(12):1451-1456.
[9] 吴乙万,黄智.基于动态虚拟障碍物的智能车辆局部路径规划方法[J].湖南大学学报(自然科学版),2013, 40(1):33-37.
[10] GU X, HAN M, ZHANG W, et al.Intelligent Vehicle Path Planning Based on Improved Artificial Potential Field Algorithm[C]//2019 International Conference on High Performance Big Data and Intelligent Systems. New York:IEEE,2019:104-109.
[11] RASEKHIPOUR Y,KHAJEPOUR A,CHEN S K,et al. A Potential Field-based Model Predictive Path-plan- ning Controller for Autonomous Road Vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2017,18(5): 1255-1267.
[12] GUO Q,ZHENG Z,YUE X.Path-planning of Automa- ted Guided Vehicle Based on Improved Dijkstra Algorithm[C]//2017 29h Chinese Control & Decision Conference.New York:IEEE,2017:7138-7143.
[13] 徐瑞,李军.无人驾驶汽车局部路径规划研究综述[J].汽车科技,2020(5): 84-89.
[14] 马飞,杨皞屾,顾青,等.基于改进A*算法的地下无人铲运机导航路径规划[J].农业机械学报,2015,46(7): 303-309.
[15] 李琼琼,施杨洋,布升强,等.基于改进A*算法的无人车路径规划研究[J].林业机械与木工设备,2020,48 (6):45-49.
[16] 张毅,施明瑞.基于单元分解的改进D* lite路径规划算法[J].重庆邮电大学学报(自然科学版),2021,33(6): 1007-1013.
[17] DOLGOV D, THRUN S, MONTEMERLO M, et al. Path Planning for Autonomous Vehicles in Unknown Semi-structured Environments[J].The International Journal of Robotics Research,2010,29(5):485-501.
[18] 齐尧,徐友春,李华,等.一种基于改进混合A*的智能车路径规划算法[J].军事交通学院学报,2018,20(8): 85-90.
[19] 杨瑶,付克昌,蒋涛,等.一种改进A*算法在智能车中的应用研究[J].重庆理工大学学报(自然科学),2021, 35(3):71-79.
[20] 田海波,李陆军,畅科剑,等.用于无人车路径规划的改进 A*算法[J].现代制造工程,2021(11):63-68,92.
[21] 辛煜,梁华为,杜明博,等.一种可搜索无限个邻域的改进A*算法[J].机器人,2014,36(5):627-633.
[22] 刘晓涛,蔡云飞,王田橙.基于SVM的受约束D*算法在无人车寻路中的应用[J].计算机与数字工程,2017, 45(9): 1748-1754.
[23] DAKULOVIĆ M, PETROVIĆ I.Two-way D*Algori- thm for Path Planning and Replanning[J].Robotics and Autonomous Systems,2011,59(5):329-342.
[24] FERGUSON D,STENTZ A.Field D*:An Interpolation- Based Path Planner and Replanner[M].Berlin Springer, 2007.
[25] KAVRAKI L E,SVESTKA P, LATOMBE J C, et al. Probabilistic Roadmaps for Path Planning in High- dimensional Configuration Spaces[J].IEEE Transac- tions on Robotics and Automation,1996,12(4):566-580.
[26] 邹善席,王品,韩旭.基于PRM改进的路径规划算法[J].组合机床与自动化加工技术,2019(1):1-3.
[27] LAVALLE S M. Rapidly-exploring Random Trees:A New Tool for Path Planning[J].Research Report,1999.
[28] 宋晓琳,周南,黄正瑜,等.改进RRT在汽车避障局部路径规划中的应用[J].湖南大学学报(自然科学版), 2017,44(4):30-37.
[29] KARAMAN S,FRAZZOLI E.Sampling-based Algori- thms for Optimal Motion Planning[J].The International Journal of Robotics Research,2011,30(7):846-894.
[30] 赵港.改进RRT*算法的智能车辆路径规划[J].汽车实用技术,2021,46(22):41-43.
[31] KUFFNER J J,LAVALLE S M.RRT-Connect:An Effic- ient Approach to Single-query Path Planning[C]//Pro- ceedings of the 2000 IEEE International Conference on Robotics and Automation. New York: IEEE,2000: 995-1001.
[32] TAHERI E, FERDOWSI M H, DANESH M. Fuzzy Greedy RRT Path Planning Algorithm in a Complex Configuration Space[J].International Journal of Con- trol, Automation and Systems,2018,16(6): 3026-3035.
[33] ELBANHAWI M, SIMIC M. Randomised Kinodyna- mic Motion Planning for an Autonomous Vehicle in Semi-structured Agricultural Areas[J]. Biosystems Engineering,2014,126:30-44.
[34] ZUO L,GUO Q,XU X, et al. A Hierarchical Path Planning Approach Based on A and Least-squares Policy Iteration for Mobile Robots[J].Neurocomput- ing,2015,170(25): 257-266.
[35] 杜明博,梅涛,陈佳佳,等.复杂环境下基于RRT的智能车辆运动规划算法[J].机器人,2015,37(4):443-450.
[36] 周维,过学迅,裴晓飞,等.基于RRT与MPC的智能车辆路径规划与跟踪控制研究[J].汽车工程,2020,42 (9):1151-1158.
[37] WERLING M,ZIEGLER J,KAMMEL S,et al.Optimal Trajectory Generation for Dynamic Street Scenarios in a Frenet Frame[C]//2010 IEEE International Confe- rence on Robotics and Automation.New York:IEEE, 2010: 987-993.
[38] CHU K, LEE M, SUNWOO M. Local Path Planning for Off-road Autonomous Driving with Avoidance of Static Obstacles[J].IEEE Transactions on Intelligent Transportation Systems,2012,13(4):1599-1616.
[39] 姜岩,龚建伟,熊光明,等.基于运动微分约束的无人车辆纵横向协同规划算法的研究[J].自动化学报,2013, 39(12):2012-2020.
[40] 魏民祥,滕德成,吴树凡.基于Frenet坐标系的自动驾驶轨迹规划与优化算法[J].控制决策,2021,36(4): 815-824.
[41] 陈成,何玉庆,卜春光,等.基于四阶贝塞尔曲线的无人车可行轨迹规划[J].自动化学报,2015,41(3): 486-496.
[42] 张琳,章新杰,郭孔辉,等.未知环境下智能汽车轨迹规划滚动窗口优化[J].吉林大学学报(工学版),2018,48 (3):652-660.
[43] ZHANG Y,CHEN H Y,WASLANDER S L,et al.Hy- brid Trajectory Planning for Autonomous Driving in Highly Constrained Environments[J].IEEE Access, 2018(6):32800-32819.
[44] RÖSMANN C,HOFFMANN F,BERTRAM T. Kinod- ynamic Trajectory Optimization and Control for Car-like Robots[C]//2017 IEEE/RSJ International Conference on Intelligent Robots and Systems.New York:IEEE,2017:5681-5686.
[45] 周慧子,胡学敏,陈龙,等.面向自动驾驶的动态路径规划避障算法[J].计算机应用,2017,37(3):883-888.
Review on Local Path Planning Algorithm for Intelligent Vehicle
MA Xiaolu, LI Ruyi*, WU Lihui
( School of Mechanical and Electrical Engineering, Henan University of Technology, Zhengzhou 450001, China )
In order to improve the driving stability and rationality of intelligent vehicles, this paper classifies and summarizes the local path planning algorithms commonly used by intelligent vehicles in recent years. Firstly, this paper expounds the principles of various traditional algorithms, analyzes their advantages and disadvantages, and points out the shortcomings of traditional algorithms in the application of intelligent vehicles. Secondly, this paper sorts out and analyzes the improved algorithms proposed by scholars when various traditional algorithms are applied to intelligent vehicles. Finally, it is proposed that the algorithm based on discrete optimization is the application trend of intelligent vehicle local path planning in the future, and the fusion of multiple algorithms is the research direction of intelligent vehicle local path planning in complex scenarios. The research results of this paper can provide reference for researchers in the field of intelligent vehicles when choosing local path planning algorithms.
Intelligent vehicle; Path planning algorithm; Local path planning;Discrete optimization;Fusion of multiple algorithms
U471.1
A
1671-7988(2022)23-232-06
U471.1
A
1671-7988(2022)23-232-06
10.16638/j.cnki.1671-7988.2022.023.043
马晓录(1964—),男,博士,教授,研究方向为智能物流装备,E-mail:maxiaolu@haut.edu.cn。
李如意(1995—),男,硕士研究生,研究方向为智能车辆的定位与路径规划,E-mail:ruyi_li1995@163.com。
国家自然科学基金(U1704156)。
猜你喜欢
中学生数理化(高中版.高考数学)(2022年4期)2022-05-25
中华书画家(2021年12期)2022-01-06
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
散文诗(2020年1期)2020-07-20
小学阅读指南·低年级版(2017年1期)2017-03-13
东方艺术·国画(2016年3期)2017-02-08
北京航空航天大学学报(2016年7期)2016-11-16
发明与创新(2016年38期)2016-08-22
人生十六七(2015年6期)2015-02-28
