轮毂电机驱动电动汽车主动悬架T-S变论域模糊控制研究
2023-01-03 05:35李韶华张培强杨建森
振动与冲击 2022年24期
李韶华, 张培强,2, 杨建森
(1.石家庄铁道大学 省部共建交通工程结构力学行为与系统安全国家重点实验室,石家庄 050043;2.石家庄铁道大学 机械工程学院,石家庄 050043;3.中汽研(天津)汽车工程研究院有限公司,天津 300300)
近年来,轮毂电机驱动电动汽车成为研究热点,它具有结构紧凑、动力传递效率高、便于控制等优点,但轮毂电机使悬架簧下质量增加,会加剧车辆垂向振动。为解决该问题,主动悬架的重要性越发凸显。在悬架控制中,车辆悬架的调节是一个多目标控制问题,对于控制策略提出了很高的要求,算法应考虑轮毂电机对平顺性的负效应,保证悬架动挠度、轮胎动载荷、作动器作用力等多项因素在要求阈值之下。针对主动悬架,研究人员先后提出了神经网络控制、MPC(model prodictive control)控制、T-S(Takagi-Sugeno)模糊控制等算法,其中T-S模糊控制结构简单、不依赖于模型,且具有良好的动态非线性特性,引起了学者们关注[1-3]。但单一的模糊控制仍有控制精度不高,过度依赖经验的缺点。变论域模糊控制引入伸缩因子对论域进行改变,可提高模糊控制的自适应性和控制精度,并且只对算法本身进行优化,设计方便、运行速度快,可有效改善单一模糊控制的缺点,具有很高的应用价值。
变论域模糊控制策略的关键在于伸缩因子的设计,柳江等[4-5]采用单个函数模型设计变论域模糊控制,取得了较好的控制效果。但单个函数模型较难反映大部分工况下伸缩因子的变化,且随着模型的变化函数模型的参数也较难确定。针对该问题,学者们开始采用智能算法对伸缩因子进行表述,刘非等[6-7]利用模糊推理构建二级变论域模糊控制器,依靠模糊规则对伸缩因子进行表述,该方法提升了模糊控制的控制精度,且具有较好的自适应性,但用传统的Mamdani模糊策略设计伸缩因子,仍具有输入量较小时优化不明显,反应速度较慢等问题。庞辉等[8]利用神经网络设计T-S模糊控制器的伸缩因子,取得较好的控制效果,但只考虑了输入伸缩因子的变化,且缺少试验论证。
为了研究轮毂电机质量对分布式驱动电动汽车悬架的影响,本文分别建立了考虑和不考虑轮毂电机质量的1/4车辆主动悬架模型,研究轮毂电机质量对悬架的影响,进而针对轮毂电机驱动电动汽车的主动悬架设计一种T-S变论域模糊控制器。该控制器基于二级变论域模糊控制器思想,改进伸缩因子的设计方法,利用T-S模糊策略对输入和输出伸缩因子同时进行描述,从而实现车辆运行过程中控制器的变论域和自适应。最后,通过仿真及硬件在环试验与单一模糊控制和传统Mamdani变论域模糊控制进行对比,从而验证了所设计控制策略的有效性。
1 车辆主动悬架动力学模型
1.1 1/4车辆模型
针对分布式驱动电动汽车建立两自由度1/4车辆模型,如图1所示。其中:M0为轮毂电机质量;M1为车辆的非簧载质量;M2为车辆的簧载质量;K1为轮胎的刚度,忽略阻尼;K2为悬架的刚度;C0为悬架的阻尼;X0,X1,X2分别为路面激励、非簧载质量垂向位移和簧载质量垂向位移。考虑到作动器会产生故障,为保证车辆的安全,该模型在被动悬架的基础上加装作动器F以提高车辆行驶中的安全性。
悬架系统动力学方程为
(1)
(2)
车辆模型参数如表1[9]所示。
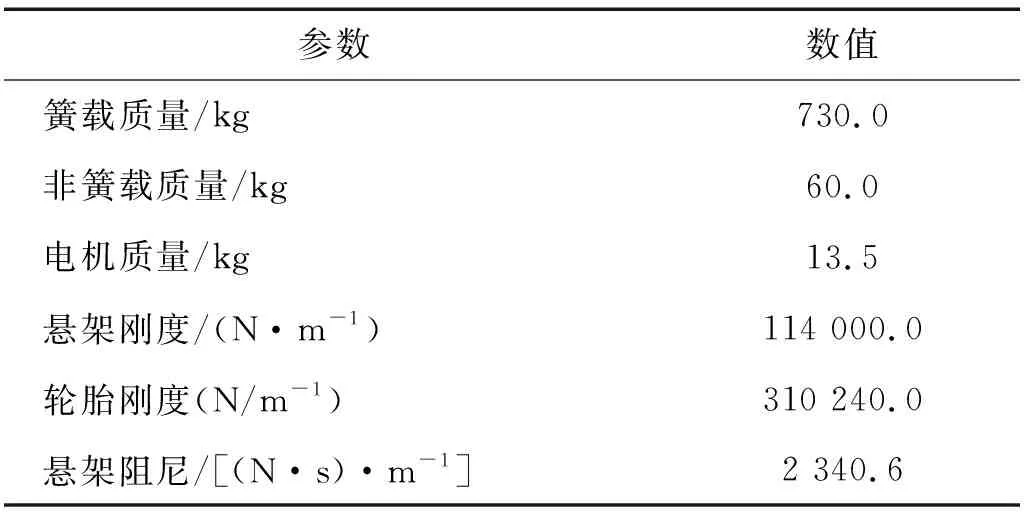
表1 车辆悬架参数
1.2 轮毂电机质量对车辆垂向振动的影响分析
为探究悬架模型中轮毂电机质量对车辆垂向振动影响,在图1的模型中忽略轮毂电机质量M0,建立了不考虑轮毂电机质量的1/4悬架模型。通过仿真对比B级随机路面下两种模型的响应,如图2所示。
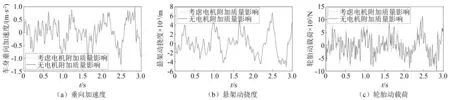
图2 B级随机路面下的车辆响应Fig.2 The vehicle responses on B-classrandom road
两种模型下的车身垂向加速度均方根值、悬架动挠度和轮胎动载荷均方根值,如表2所示。
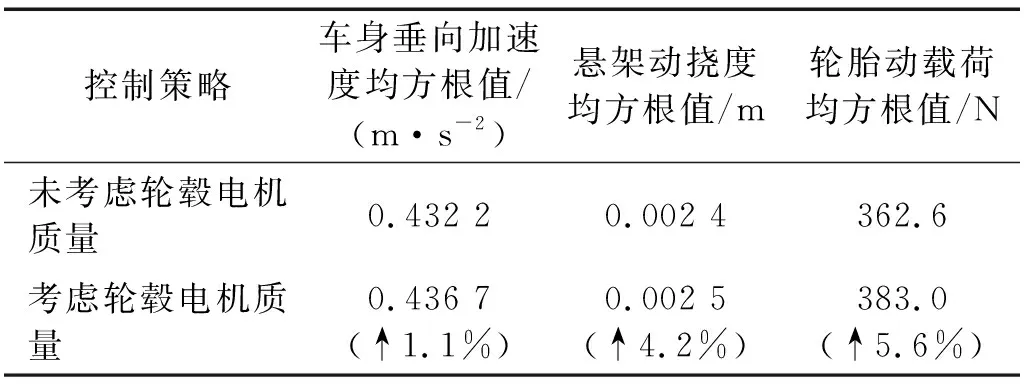
表2 B级随机路面下各悬架平顺性比较
由图2及表2可知:考虑轮毂电机质量后,各响应指标均有所增大;轮毂电机质量对轮胎动载荷和悬架动挠度的影响大于对车体垂向加速度的影响。因此,对于分布式驱动电动汽车的悬架振动和控制研究,轮毂电机质量不容忽视。
2 T-S模糊控制器设计
相对于传统的Mamdani模糊控制,T-S模糊控制更适合在动态非线性系统或局部线性系统中为不同工作状态下的多线性控制器进行平滑切换,并且输出为清晰值或为输入量的函数,可直接作用于控制器,具有运行速度快,控制更精准的优势。
2.1 T-S模糊算法概念
在模糊控制理论中,对于多输入、单输出的系统,可以利用模糊条件语句“Ifx1isA1andx2isA2,thenuisU”来进行描述,其中A1,A2为输入系统的隶属函数集,输出量U则为x1,x2的线性函数f(x1,x2)。
输出函数f(x1,x2)主要有两种表现形式:① 0阶T-S模糊推理:“Ifx2isA1andx2isA2,thenu=k”;② 1阶T-S模糊推理:“Ifx2isA1andx2isA2,thenu=p*x1+q*x2+r”。其中k,p,q,r均为常数,一般通过大量数据测试和经验得出[10-11]。
2.2 控制器设计
选取车身垂向加速度为控制目标,考虑到随机路面的变化情况,将车身垂向速度与加速度构成一个双输入、单输出的控制模型,控制框图如图3所示。图3中,r与a分别为理想加速度和实际加速度输出,ec=r-a,e为速度的误差,ec为加速度的误差。
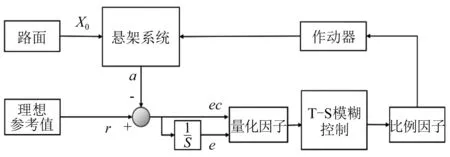
图3 T-S模糊控制框图Fig.3 The diagram of T-S fuzzy control
T-S模糊控制器设计步骤如下。
步骤1论域的选择:由表1的悬架参数,搭建被动悬架,观测车辆响应,根据各路面下的输出,我们可以确定e和ec物理论域的范围分别为{-0.1,0.1}和{-1.5,1.5};
步骤2输出函数的设计:输出u使用0阶模糊推理;
步骤3规则的建立:输入变量为e与ec,均采用了7个语言模糊子集{NB(负大),NM(负中),NS(负小),Z(零),PS(正小),PM(正中),PB(正大)},为保证算法可以平滑过渡,其隶属函数均为trimf形;
步骤4量化因子Ke,Kec和比例因子Ku的选取:可根据不同路面条件下的模糊控制器的模糊论域N和系统的物理论域X进行计算[12-14],该控制器中e的模糊论域为Ne=[-ne,ne],ec的模糊论域为Nec=[-nec,nec],u的模糊论域为Nu=[-nu,nu],输入的物理论域为Ue=[-ue,ue]和Uec=[-uec,uec],输出物理论域为U1=[-u1,u1]。可得
Ke=ne/ue
(3)
Kec=nec/uec
(4)
Ku=u1/nu
(5)
本文设计的T-S模糊控制器的模糊推理规则共49条,如表3所示。
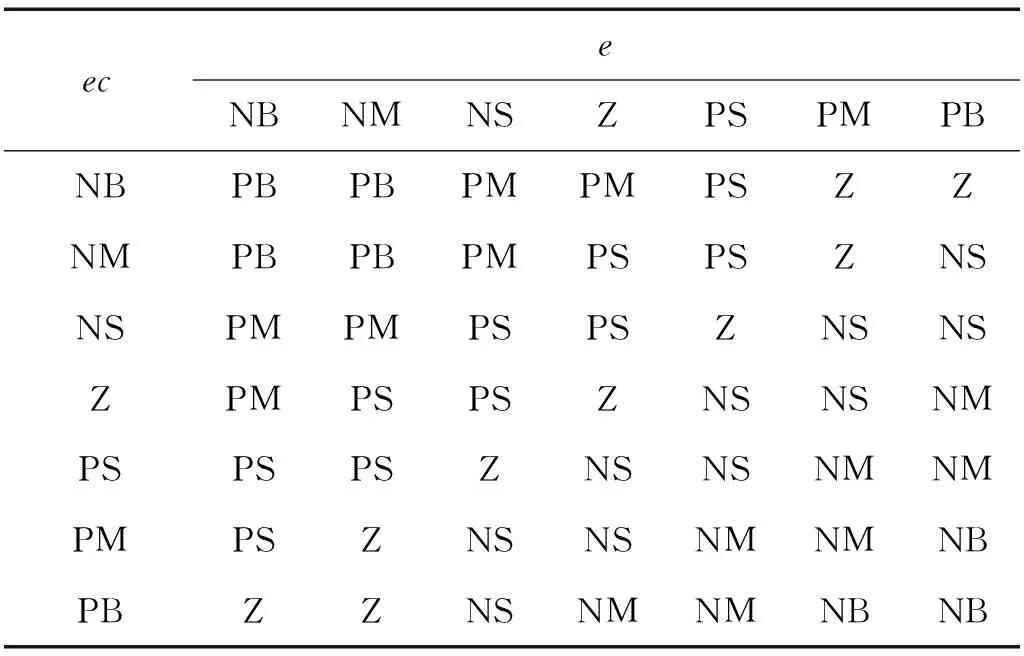
表3 T-S模糊控制规则表
2.3 约束条件
主动悬架控制策略还要满足以下约束条件:①保证车辆的平顺性,该要求一般选取车身的垂向加速度作为评价指标,本文以降低车身垂向加速度为主要目标;②考虑到悬架本身结构的设计,为保证车辆各部件的运行不受干扰,控制器应保证悬架动挠度保持在一定的行程范围Xmax内,减少悬架与限位块碰撞概率,即
|X2-X1|≤Xmax
(6)
为了保证车辆的行驶安全和操纵稳定性,在车辆行驶过程中的任意时刻,轮胎动载荷应小于车辆静载荷[15-16],以减少车轮与路面之间的冲击,即
K1(X1-X0)≤(M1+M2)g
(7)
为了保证系统的稳定性和安全性,必须考虑控制器的饱和度,其输出力应低于所规定的阈值,本文选择直线电机作为执行机构,即
|u|≤umax
(8)
本文选取Xmax=0.05 m,(M1+M2)g=7 800 N,umax=300 N。
3 T-S变论域模糊控制器设计
车辆行驶过程中经历的多种工况,会导致车辆垂向加速度在较大的范围内产生变化,而上节提出的单一T-S模糊控制器面对复杂工况时则具有一定的局限性,固定的输入、输出论域不能充分发挥模糊控制的效果,尤其对于超出论域表述范围的输入,会导致输出幅值较为振荡,而对于过小的输入,也不能充分利用整个论域的控制规则。为改进控制策略的工况自适应能力,引入变论域思想。
假定模糊控制器输入和输出的原始论域分别为
X1=[-E1,E1]
X2=[-E2,E2]
Y=[-U,U]
(9)
原始论域的范围由输入e和ec的值x1,x2和输出u的值y界定,引入变论域思想后,该论域则会随着输入和输出值的变化而变化,记为
X1=[-α1(x1)E1,α1(x1)E1]
X2=[-α2(x2)E2,α2(x2)E2]
Y=[-β(y)U,β(y)U]
(10)
式中,α和β为论域的伸缩因子,是一个随着输入量x和输出值y的变化而不断变化的值,α为输入伸缩因子,β为输出伸缩因子,当模糊控制中的输入量和输出量分别与伸缩因子α和β结合时,论域可以跟随系统的输入输出而变化,提升系统控制的适应能力[17-18]。
变论域模糊控制策略的关键在于对输入、输出伸缩因子进行设计,输入伸缩因子的主要作用是将系统输入e,ec与模糊论域进行适配,使得系统输入能充分利用模糊规则,提高控制精度。输出伸缩因子的主要作用是调节控制器的输出,保证输出的稳定性。算法在设计时应考虑系统输入e,ec的作用和权重,用T-S模糊控制规则对输入输出伸缩因子进行调整,满足变化时的e和ec对系统论域的不同要求,以实现模糊论域的自我调整。
由此提出输入伸缩因子的设计规律,其模糊控制原则为:
(1)当输入e和ec的值均较大时,应尽快消除误差,此时输入论域应该扩大,保证输入值可以有效利用模糊论域。
(2)而e和ec的值较小时,系统开始趋近于稳定,此时应考虑到e和ec两者之间的关联,缩小输入系统的论域,使控制器精度提升。
(3)当e和ec的值在控制器的论域范围内时,使论域保持不变。
根据输入e和ec的值,同时结合T-S模糊控制器的模糊规则,可设计输出伸缩因子的调节规律为:
(1)当e和ec较大且方向相同时,系统的误差较大且误差仍在不断增大,需要系统提供大的控制量,减小其误差,保证系统的稳定性,因此应扩大输出论域。
(2)当e和ec较大且方向相反时,系统的误差较大且误差在不断减小,需要系统尽量保证控制量不要过大,使系统的误差减小,并保证系统不会产生较大振荡,因此应小幅度压缩输出论域,保证控制力的输出稳定。同时根据控制器的模糊规律,对控制力较小的地方输出论域可以保持不变,防止振荡。
(3)当e和ec较小时,系统开始趋近于稳定,应减小输出力,即压缩系统的输出论域。
(4)当ec接近零而e很大且同向时,系统的误差非常小,但系统正以很快的速度偏离设定值,此时控制量应增大以抑制系统偏离的趋势,且要防止振荡的产生,因此输出论域应有小幅度扩张。
由此可提出主动悬架T-S变论域模糊控制策略,根据不同时刻e和ec的大小,通过T-S模糊控制规则推理计算出论域伸缩因子,在论域伸缩因子与量化因子和比例因子结合后,根据输入输出值来调整自身论域的大小,控制框图如图4所示。
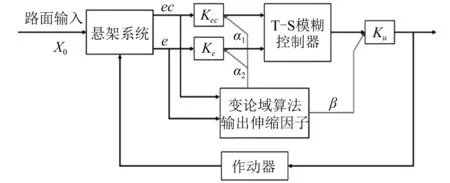
图4 主动悬架T-S变论域模糊控制原理图Fig. 4 The principle of T-S variable domain adaptive fuzzy control for active suspension
输入及输出伸缩因子模糊计算中,选取e和ec论域范围分别为{-0.1,0.1}和{-1.5,1.5},采用7个语言模糊子集{NB(负大),NM(负中),NS(负小),Z(零),PS(正小),PM(正中),PB(正大)},其隶属函数均为trimf形。输出u为0阶模糊推理输出函数,论域的范围为[0,1],模糊划分为{Z(零),S(小),M(中),B(大)}。输入论域伸缩因子α1和α2的模糊控制规则如表4和表5所示。输出论域伸缩因子β的模糊控制规则,如表6所示。
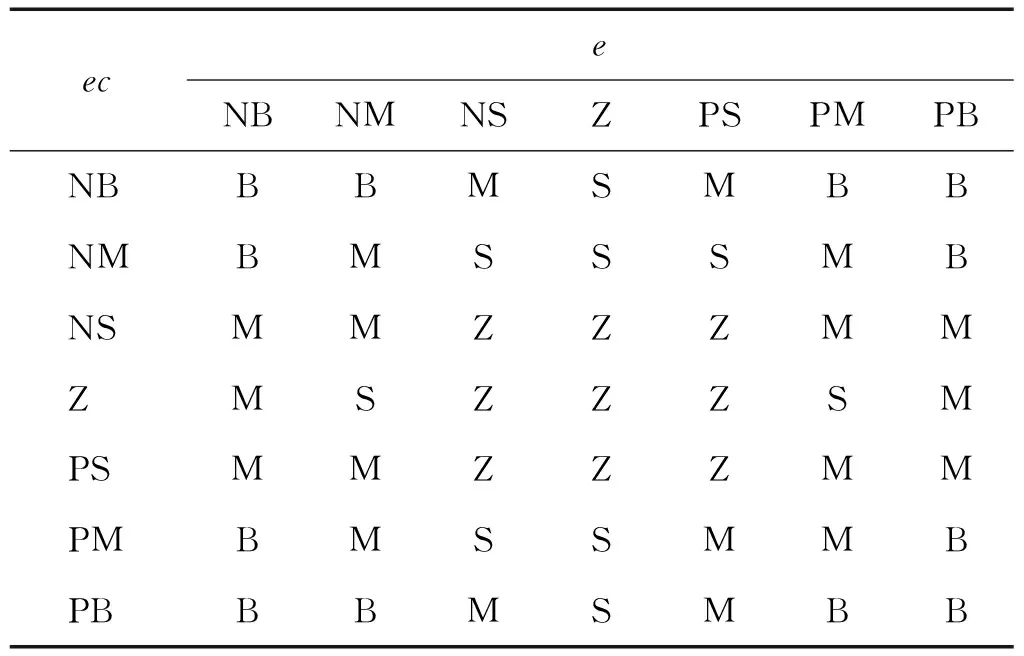
表4 输入论域伸缩因子α1模糊控制规则表
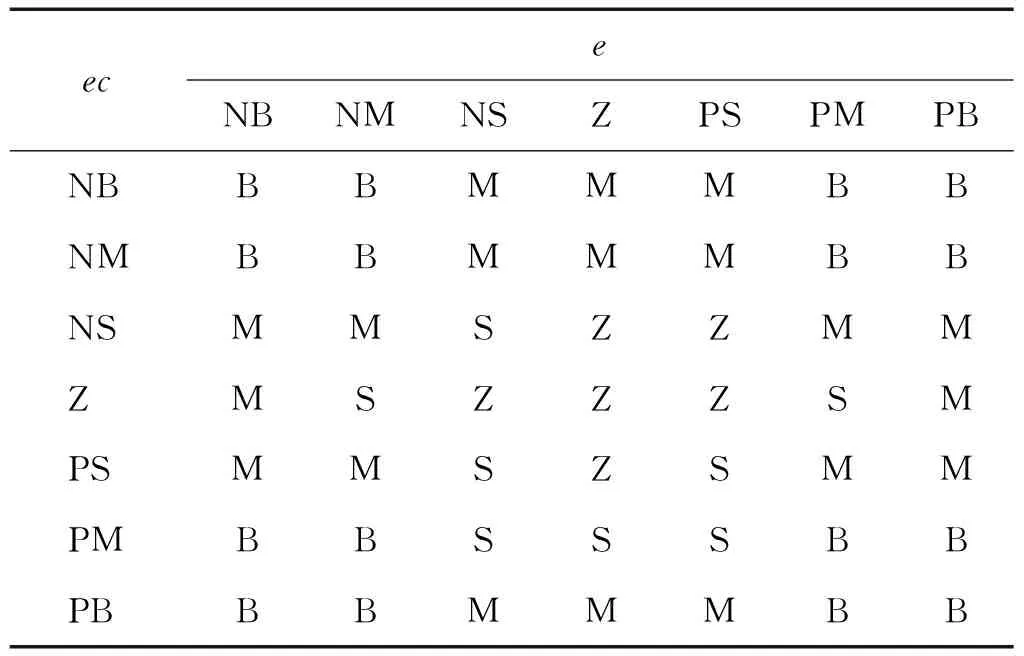
表5 输入论域伸缩因子α2模糊控制规则表
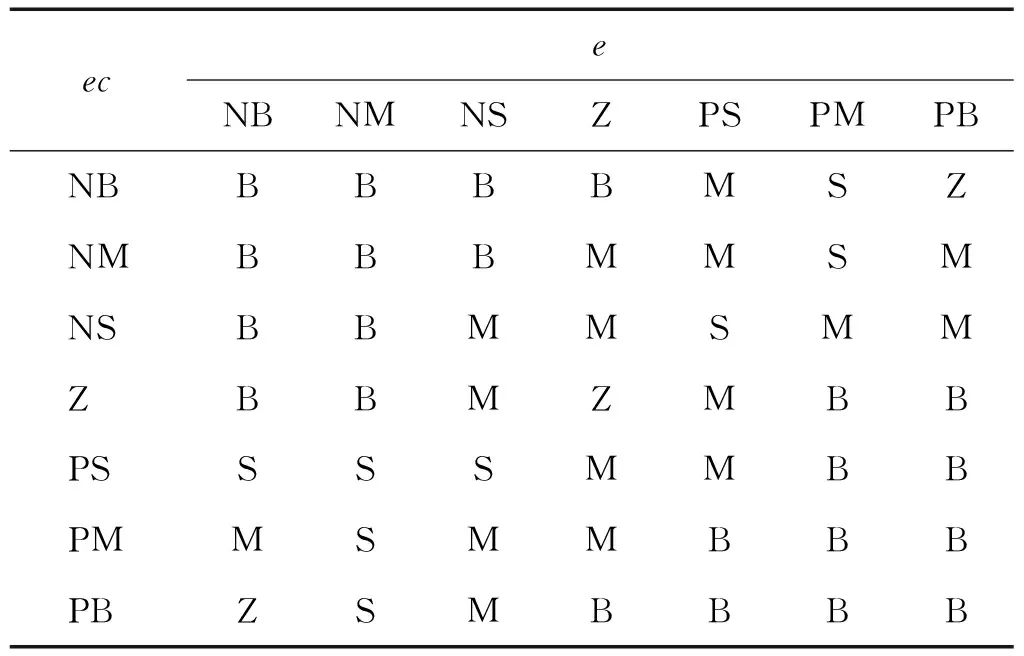
表6 输出论域伸缩因子β模糊控制规则表
由于输入输出因子的e与ec的模糊划分相同,结合3个表格的模糊规则,设计一个双输入三输出的T-S模糊伸缩因子控制器,实现对输入输出论域的调节。
4 仿真分析

4.1 随机路面
4.1.1 B级随机路面
基于路面不平度的功率谱密度,使用有理函数滤波白噪声生成法计算路面不平度[19],取B级随机路面,车速设定为20 km/h,行驶时间为10 s,路面激励可由式(11)计算
(11)
式中:v为车速;Gq(n0)为路面不平度系数;w0(t)为白噪声;q(t)为路面位移激励。计算得到B级路面下不同控制器对悬架系统响应的影响,如图5所示。
不同控制策略下的主动悬架与被动悬架的车身垂向加速度、悬架动挠度及轮胎动载荷均方根值,如表7所示。
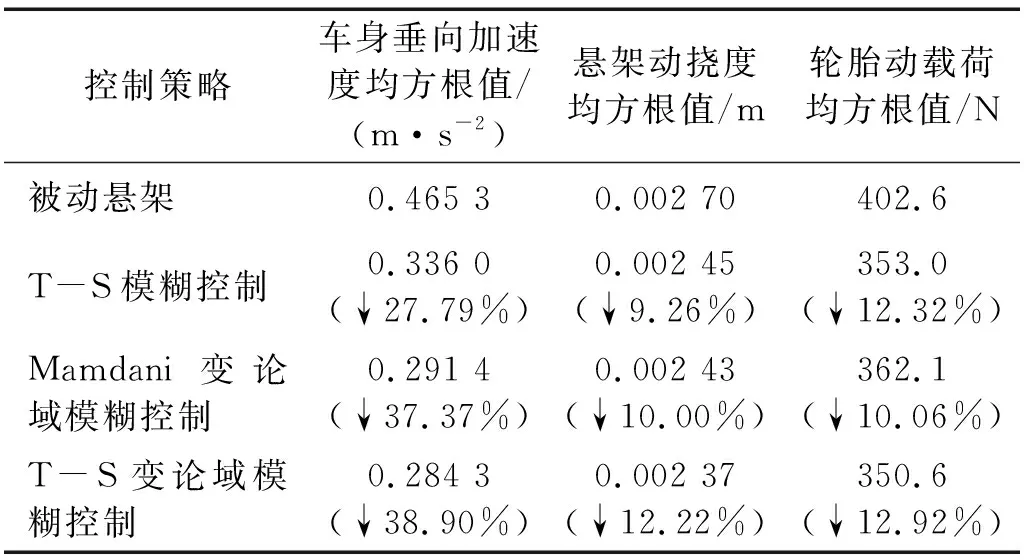
表7 B级随机路面下各悬架平顺性比较
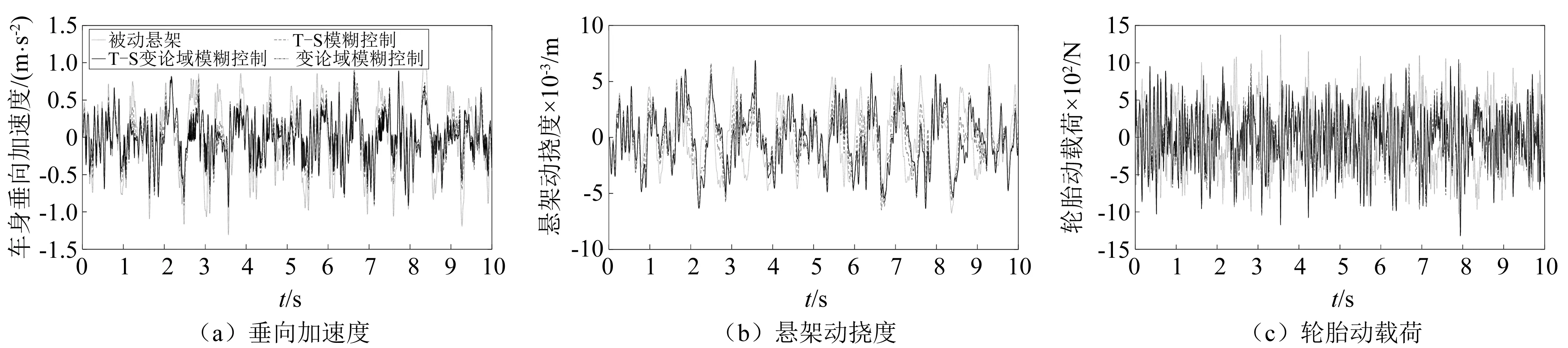
图5 B级随机路面下车辆响应Fig.5 The vehicle responses on B class random road
由图5及表7可知:①T-S变论域模糊控制可有效降低车身垂向加速度,控制效果略优于其他对比算法。②各种主动控制策略对悬架动挠度和轮胎动载荷的控制效果相差不大,都可以满足约束条件,减少悬架与限位块碰撞及车轮与路面之间的冲击。
4.1.2 C级随机路面
取C级随机路面,车速设定为20 km/h,行驶时间为10 s,计算得到C级路面下不同控制器对悬架系统响应的影响,如图6所示。各响应的均方根值,如表8所示。
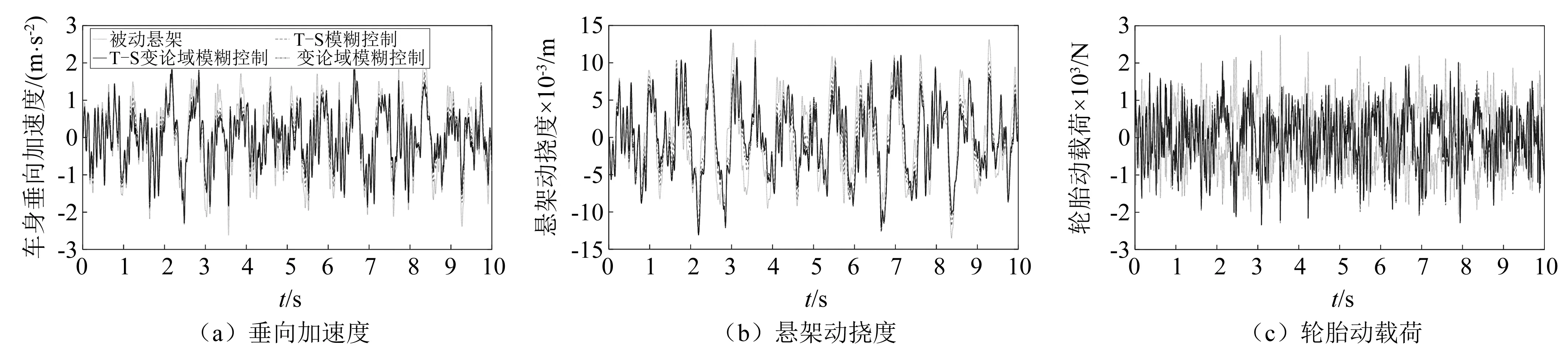
图6 C级随机路面下车辆响应Fig.6 The vehicle responses on C class random road
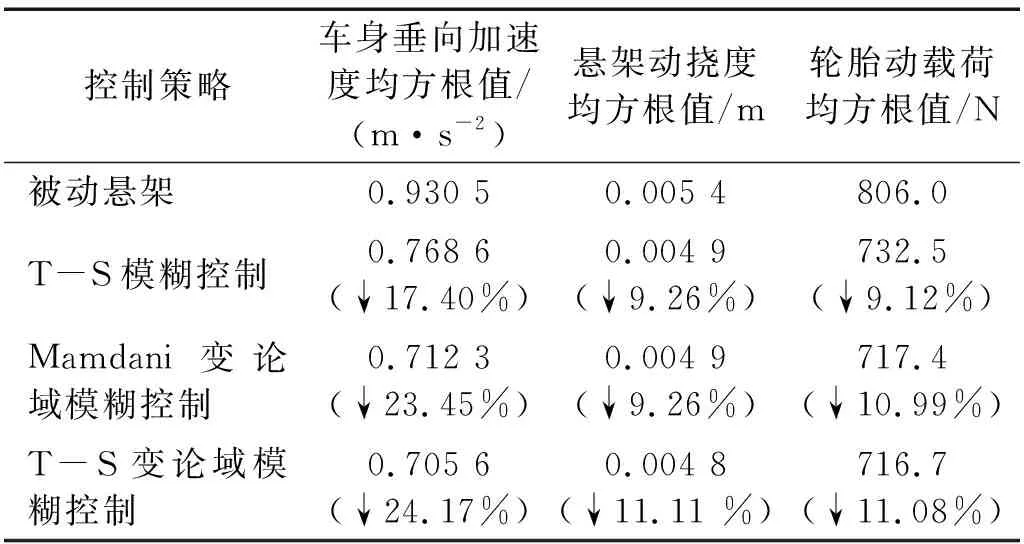
表8 C级随机路面下各悬架平顺性比较
由图6及表8可知,在C级路面上,T-S变论域模糊控制仍可有效降低车身垂向加速度,并保证其他参数满足约束条件,总体来看控制效果略优于其他对比算法。
4.2 对接路面
为了进一步验证控制策略的工况自适应性,使用有理函数滤波白噪声生成B-C级对接路面。车速设定为20 km/h,行驶时间为10 s,车辆前5 s为在B级路面上行驶,后5 s为在C级路面上行驶。仿真得到车辆响应,并与被动悬架、T-S模糊控制策略和Mamdani变论域模糊控制进行对比,如图7所示。不同控制策略下的车身垂向加速度、悬架动挠度和轮胎动载荷均方根值,如表9所示。
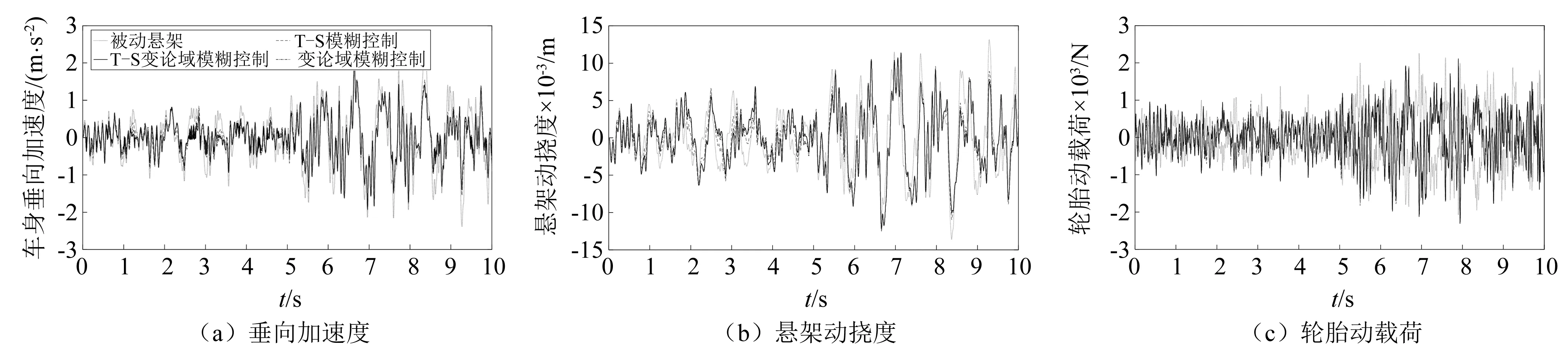
图7 对接路面下车辆响应Fig. 7 The vehicle responses on joint road
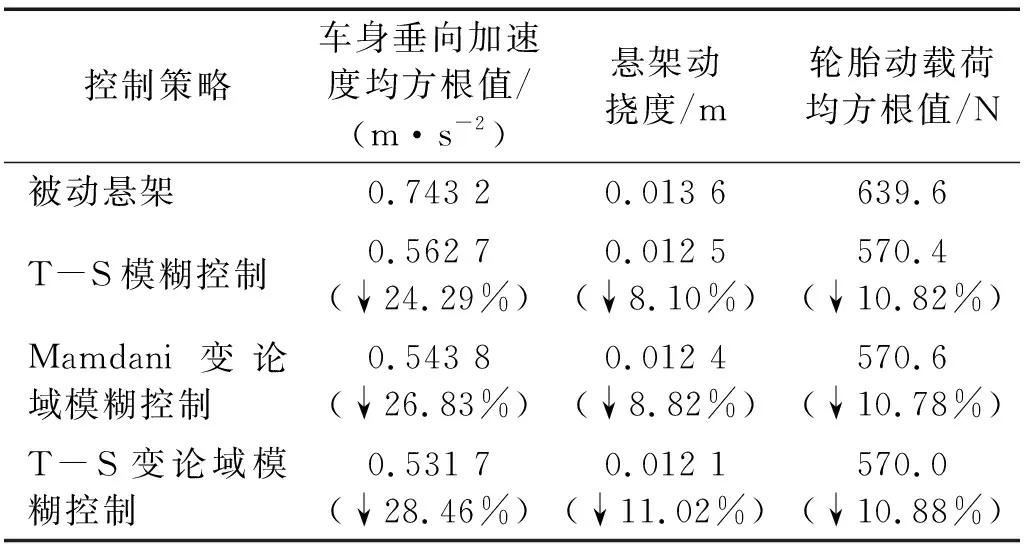
表9 对接路面下各悬架平顺性比较
由图7和表9可知,T-S变论域模糊控制的效果在变路面激励下可显著提高车辆平顺性,并保证悬架动挠度、轮胎动载荷等多项因素在要求阈值之下。
对比B级、C级随机路面和B-C级对接路面工况下的响应结果,可以看出:T-S变论域模糊控制在各路面下均具有很好的自适应性,控制效果均优于单一模糊控制;在对接路面等复杂工况下,相对于传统Mamdani变论域模糊控制, T-S变论域模糊控制具有更好的控制效果。因此,所提出的T-S变论域模糊控制具有较强的工况自适应性,更适用于变路面工况。
5 试验验证
为了验证T-S变论域模糊控制策略的有效性,采用加拿大Quanser公司生产的主动悬架控制试验系统进行验证。Quanser主动控制试验系统是一个小型的1/4 汽车悬挂系统模型,可用于闭环系统的性能分析,配合实时软件QuaRC,通过Simulink 库内嵌入QuaRC软件的特有模块库,对硬件端口进行通道选择指定和实时通讯控制。在PC端通过Simulink库编写控制程序,通过板卡和功放器,使试验台在输入的激励和算法控制下工作,并将信号和数据传递回PC,其工作原理及测试现场如图8和图9所示。
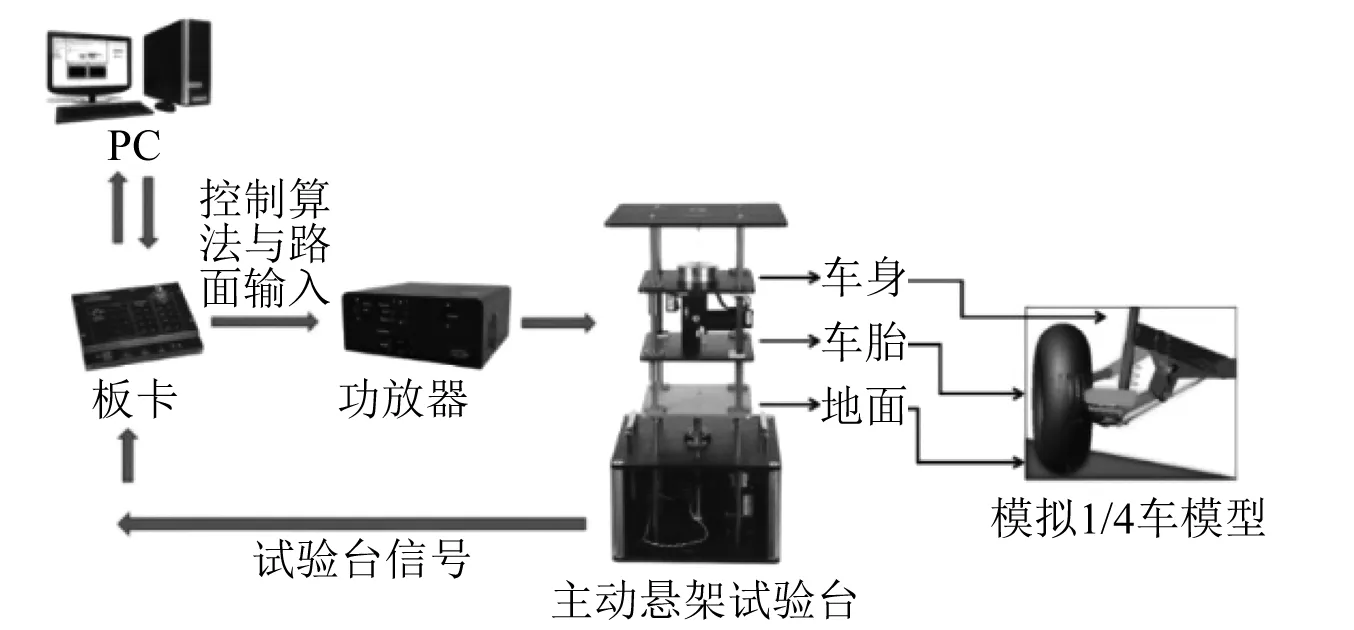
图8 Quanser试验台工作原理Fig.8 The principle of Quanser test bench
由于试验台的硬件限制,对输入信号的频率和幅值有一定的要求,需要将输入信号经由滤波后转为试验台的输入,且输入幅值不能过大。因此,本章采用试验台的参数建立悬架模型并进行控制算法验证。试验台参数,如表10所示。
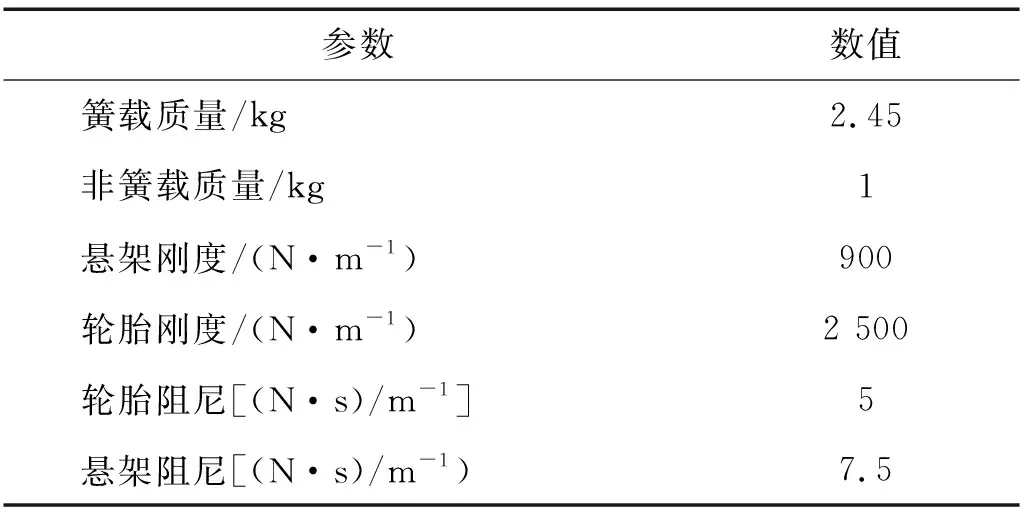
表10 试验台悬架参数
5.1 随机路面
为保证输入相同,仍使用有理函数滤波白噪声生成B级随机路面模型,车速设定为20 km/h,行驶时间为10 s,经过滤波处理后作为试验台的输入。实测的悬架响应,如图10所示。
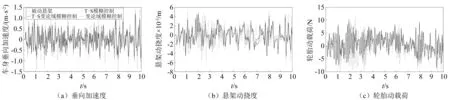
图10 B级随机路面下实测响应Fig. 10 The test responses on B class random road
各控制策略下悬架试验台的车身垂向加速度均方根值、悬架动挠度和轮胎动载荷均方根值,如表11所示。
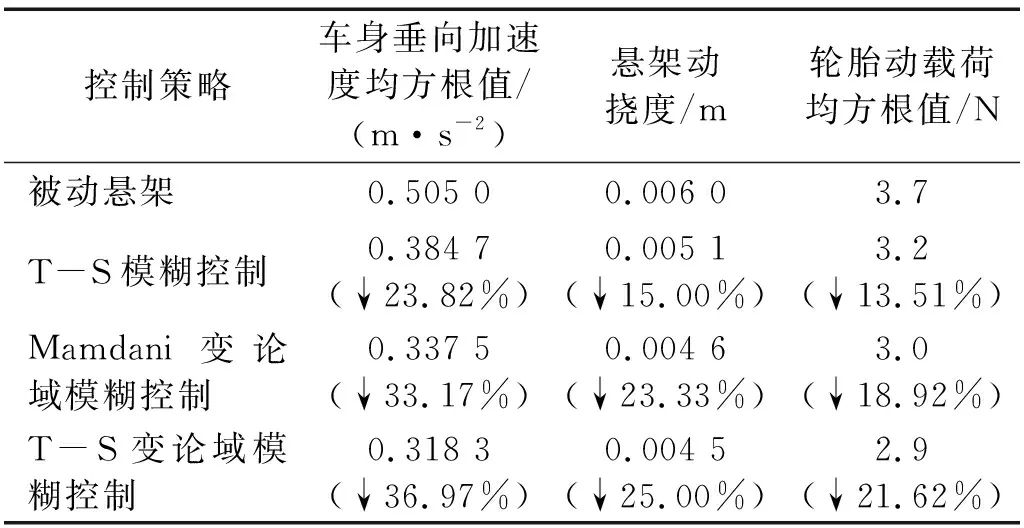
表11 试验台在随机路面下悬架平顺性比较
由图10和表11可知,试验台得到的控制效果与仿真结果具有相同的趋势,说明T-S变论域模糊控制在保证车辆接地安全性的前提下,可以有效改善车辆平顺性,且控制效果略优于其他两种控制策略。
5.2 对接路面
由于试验仪器的局限性,对接路面设为A-B级对接路面,车速设定为20 km/h,行驶时间为10 s,前5 s为在A级随机路面上行驶,后5 s为在B级随机路面上行驶,试验结果如图11所示。
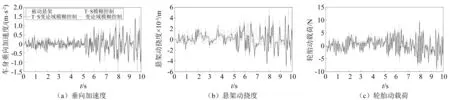
图11 对接路面下实测响应Fig.11 The test responses on joint road
在对接路面激励下,采用各控制器的车身垂向加速度均方根值、轮胎动载荷和悬架动挠度,如表12所示。
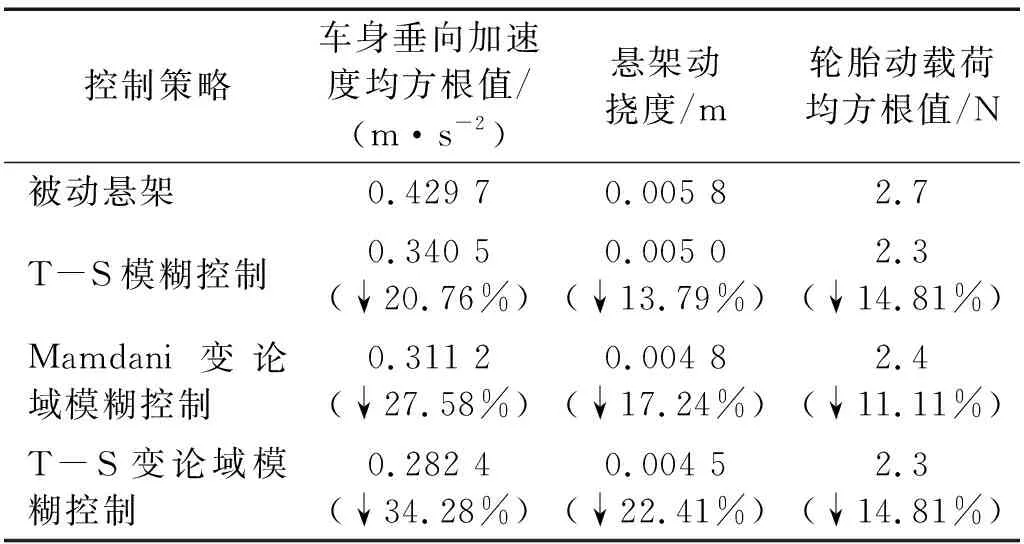
表12 试验台在对接路面下悬架平顺性比较
由图11和表12可知,T-S变论域模糊控制在对接路面上可以有效改善车辆行驶平顺性,且控制效果均优于其他两种控制策略。T-S变论域模糊控制在车身加速度控制上表现较好,在悬架动挠度和轮胎动载荷上表现类似于仿真试验中的结果趋势,即在约束指标上也有一定的控制效果。
6 结 论
本文探究了轮毂电机质量对悬架的影响,并将T-S模糊控制与变论域思想相结合,针对分布式驱动电动汽车主动悬架设计了一种新型T-S变论域模糊控制策略,仿真和台架试验研究表明:
(1)所提出的T-S变论域模糊控制,可以在减少轮毂电机对车辆平顺性影响的基础上,保证悬架动挠度、轮胎动载荷等多个指标在要求阈值之下。T-S模糊变论域控制在B级路面下使垂向加速度、悬架动挠度和轮胎动载荷分别降低38.9%,12.22,12.92%;在C级路面下,3个指标分别降低24.17%,11.11%,11.08%;而在B-C级路面下,3个指标分别降低28.46%,11.02%、10.88%。
(2)在各路面条件下,所提出的T-S变论域模糊控制对车身垂向加速度的控制效果均优于单一T-S模糊控制和Mamdani变论域模糊控制,并且在变路面条件下T-S变论域模糊控制的工况自适应性更突出。
(3)利用T-S模糊策略设计伸缩因子,实现论域变化,相比于传统的Mamdani变论域模糊策略,可借助T-S模糊具有的局部线性化优势来提升伸缩因子的变化精准度,从而使论域的变化更准确、精度更高,提升模糊控制的控制效果和运算速度和在各工况下的自适应能力。
猜你喜欢
汽车实用技术(2022年5期)2022-04-02
计算机仿真(2022年2期)2022-03-15
哈尔滨工程大学学报(2021年7期)2021-07-13
汽车实用技术(2021年3期)2021-02-24
成都信息工程大学学报(2021年6期)2021-02-12
电子制作(2019年16期)2019-09-27
计算机与数字工程(2019年8期)2019-09-03
电子制作(2016年21期)2016-05-17
汽车与驾驶维修(汽车版)(2015年8期)2015-03-25
汽车零部件(2015年5期)2015-01-03