微波光子移相器辅助的均匀圆形相控阵测向
2023-01-04 13:29张先玉乔晓强
探测与控制学报 2022年6期
张先玉,梁 涛,安 康,乔晓强
(国防科技大学第六十三研究所,江苏 南京 210007)
0 引言
测向是无线信号测量、分类和识别的重要内容,具有作用距离远、定位精度高、受环境影响小等优点,广泛应用于雷达、导航、移动通信、救援和电子战等诸多民事和军事领域中[1-2]。基于相位、幅度、频率、到达时间等信号参数,目前已经发展出了最大/最小幅度法、和/差方向图法、瓦特森-瓦特测向法、多普勒测向法、到达时间差测向法、相位干涉仪测向、相关干涉仪测向等多种体制。这些测向体制原理明晰,处理过程简单直观,测向设备也较为简单,但是无法同时分辨多个时频重叠信号[3];而阵列响应型测向技术可实现对多个目标信号的同时测向。相控阵测向是一种与阵列天线配合使用的信号处理技术,它通过对阵列输出进行加权实现波束成形和空域滤波,进而通过波束扫描实现信号的方位测定[4]。另外,均匀圆阵具有天线孔径小、可实现二维测向、适用频段宽、测向精度均匀等优点,得到了广泛的关注和研究[5-6]。
作为相控阵的关键器件,移相器的性能参数对相控阵系统的性能起决定性作用。然而,传统的电移相器受“电子瓶颈”的影响,工作频率及带宽受限,并且存在体积损耗大、易受电磁干扰等缺点,难以满足现代通信及雷达等系统的发展需求。为此,业界尝试利用光生微波技术实现移相[7-8]。微波光子移相器具有工作频率高、带宽大、相位调谐范围大、稳定性好、体积功耗小、抗电磁干扰强等优点,可满足未来相控阵技术的发展需求。现有的微波光子移相器主要有基于光真延时技术(optical true-time delay, OTTD)、矢量和技术及外差混频技术三类方案。基于OTTD的移相器适用于宽带波束控制系统,是利用不同长度的光实时延时线具有不同的相移来实现移相。文献[9]提出了一种基于OTTD的波束成型器,并且避免了波束成形器的可扩展性问题。文献[10]利用开光控制和波长循环回路构成OTTD波束形成网络,实现从-60°~60°的扫描范围。基于OTTD的移相器结构较为复杂,并且相位调节精度不高。基于矢量和技术的微波光子移相器利用外加信号与输入信号的矢量和实现移相。文献[11]基于矢量和技术提出了利用色散位移光纤的移相器。基于矢量和的微波光子移相器结构简单,但难以实现大范围的可控相移,输出微波信号的波动幅度较大。而基于外差混频技术的微波光子移相器具有结构紧凑,便于集成,相位调节中不需调节幅度等优势,因此该技术方案得到了关注和研究。文献[12]利用单边带偏振调制器实现了11~43 GHz范围内信号-180°~180°的连续相移[12]。文献[13]研究了一种基于双驱马赫曾德尔调制器的微波光子移相器。文献[14]利用线性啁啾布拉格光栅设计了一种微波光子移相器方案。文献[15]利用双偏振马赫-曾德尔调制器实现了10~33 GHz范围内-180°~180°的相移。文献[16]提出了一种基于偏振调制器的微波光子移相器,能够实现宽带微波信号的处理。基于外差混频技术的移相器能实现相位的精确连续调控,发展和应用前景更明确,但以上介绍的方案大多需要利用光滤波器件,作用频段和带宽受限,价格昂贵,且系统功能相对单一。
本文基于微波光子移相器的均匀圆形相控阵测向技术,提出一种基于双平行马赫曾德尔(DPMZM)的微波光子移相器方案,分别利用DPMZM和PM产生单边带信号和相位可调的载波信号,耦合后经过拍频实现对射频信号的相位控制。
1 相控阵测向算法
经典的相控阵测向技术就是通过调整阵列接收信号的相位值来改变波束的指向,实现对指定区域的扫描,利用接收阵列信号的最大值判断信号的来波方向。为克服传统电域移相器的诸多缺陷,本文提出一种基于微波光子移相器的相控阵测向技术,实现方案如图1所示。
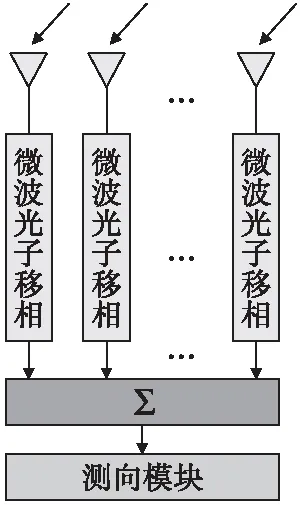
图1 微波光子移相器辅助的相控阵测向系统Fig.1 Schematic diagram of phased array direction finding system based on microwave photonic phase shifter
用微波光子移相器对每个天线阵元的接收信号进行相位控制,进而对处理后的信号进行求和,使得阵列天线的接收增益聚焦在某一特定方向,实现对目标区域的自动扫描,其中最大输出功率所对应的方向即为信号的来波方向值。
不失一般性,设定各天线阵元各向同性,接收通道一致且不考虑天线互耦等因素的影响。假定Q个远场窄带信号发送到阵元数为N的天线阵,各天线通道同步接收,则天线阵接收的第i个信号可表示为
si(t)=ui(t)ej(ω t+φi),
(1)
式(1)中,ui(t)表示第i个接收信号的幅度,ω为信号的频率,φi为接收信号的初始相位。
基于窄带远场信号的假设,可知
si(t-τ)≈si(t)e-j ω τ。
(2)
天线阵第l阵元的接收信号可表示为
(3)
式(3)中,gli表示第l个阵元对第i个信号的增益,τli表示第i个信号到达第l个阵元相对参考阵元的时延,nl(t)表示第l个阵元接收的噪声信号。
基于通道一致性的考虑,可对通道增益进行归一化处理,即gli=1,则天线阵接收的信号向量可表示为
(4)
式(4)可写为矩阵形式为
x(t)=As(t)+n(t),
(5)

(6)
设定信号来波方向为(αi,βi),设定阵列中某个参考点为(0,0,0),第k阵元坐标设定为(xk,yk,zk),则目标信号到达该阵元的时延为
(7)
阵列可同时对来波信号的方位角和俯仰角进行二维测向。设定圆阵的圆心为参考点,圆阵半径为r,则信号到达第k个阵元的相应时延可表示为[3]
(8)
均匀圆阵的导向矢量可表示为
(9)
假设天线阵的加权矢量为
(10)
则阵列信号加权求和之后的输出为
y(t)=wTx(t)。
(11)
同时,阵列输出信号的平均功率为
(12)
2 基于DPMZM的微波光子移相器
为克服传统的电域移相器存在工作频率低、带宽小、体积功耗大、电磁干扰强等缺点,有必要利用微波光子技术实现对微波信号的相位控制[17]。为此,提出一种基于DPMZM的微波光子移相器方案,其方案结构如图2所示。工作原理为,选取一个连续可调激光器作为光源,通过分束器分为上下两路,上支路信号通过DPMZM,通过调整偏置电压,实现抑制载波单边带调制(CS-SSB)。下支路载波信号通过一个相位调制器PM,改变直流偏置电压值即可实现不同的相位偏移量,最后通过合束器将两路信号合并,通过光电探测器(photodiode, PD)可得到相移的射频信号。
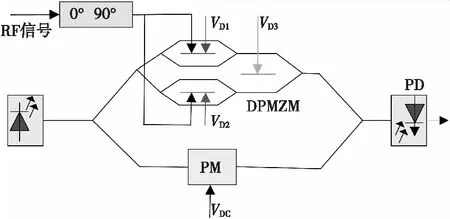
图2 基于DPMZM的微波光子移相器结构示意图Fig.2 The principle of proposed microwave photonic phase shifter based on DPMZM
DPMZM的内部结构如图3所示,由两个平行的MZM调制器和一个PM组成,两个MZM分别有一个射频接口和一个直流接口,PM有一个直流接口,通过调整不同的端口输入,DPMZM可以灵活实现各种调制方式[18]。
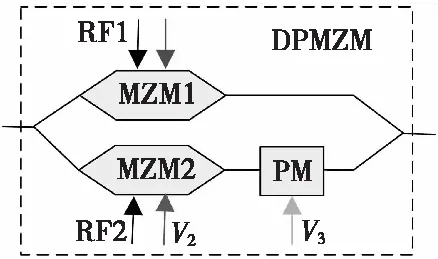
图3 DPMZM结构原理图Fig.3 Schematic of the DPMZM
设定激光器的输入信号为
Ein(t)=E0cos(ω0t),
(13)
式(13)中,E0和ω0分别表示光载波的幅度和角频率。
令DPMZM中上下两路MZM的输入射频信号分别为Vesinωet和Vecosωet,即两路信号有90°相移。调整两个MZM均工作在最小传输点,假定两个MZM具有相同的半波电压Vπ1,则输入直流偏置电压为VD1=VD2=Vπ1。
因此,DPMZM中上支路MZM的输出信号可表示为[19-20]:
(14)
式(14)中,Jn为n阶贝塞尔函数,β为MZM调制器的调制系数。可见,此MZM调制器抑制了偶次阶边带,仅剩余奇次阶边带。
类似地,DPMZM中下支路MZM的输出信号可表示为
(15)
(16)
在小信号调制下,由贝塞尔函数的性质可知,相对低阶贝塞尔函数,其高阶贝塞尔函数值可以忽略。因此,DPMZM的输出信号为
(17)
下支路载波信号通过PM调制器,通过调节偏置电压VDC引入相移量,即输出信号为
(18)
上下路信号经耦合后的合并信号为
(19)
通过PD拍频,可得到输出信号为
(20)
可见,通过调节下路PM的偏置电压VDC即可实现微波相位-180°~180°的相移,并且输出的微波信号幅度不受调制电压的影响,能输出幅度平坦的微波移相信号。
3 仿真实验验证
本文所提测向方案综合利用了光学和电学技术,能充分利用两种技术的优势,实现高频段多时频重叠微波信号的测向。为验证所提方案的有效性,有必要分别设计实验验证移相器和测向算法的性能。
3.1 微波光子移相器性能验证
为验证所提微波光子移相器的性能,利用VPI软件进行仿真实验分析。设置连续可调激光器的频率为193.1 THz(波长为1 552.52 nm),功率为10 dBm。DPMZM中分别输入两路相位差为90°频率为10 GHz的射频信号,两路射频信号可通过电移相器得到。DPMZM的半波电压设置为5 V,其中两个MZM调制器均工作在最小传输点,即VD1=VD2=5 V。上路PM调制器的直流电压设置为VD3=-2.5 V。下路载波信号经过PM调制器,通过调整下路PM的直流偏置电压值可改变生成光载波信号的相位。为提高信号功率,在信号拍频之前增加一个增益为24 dB的掺铒光纤放大器(Er-doped fiber amplifier, EDFA)。
3.1.1链路输出信号
将上路微波信号通过DPMZM调制器调制,由于DPMZM中两个MZM调制器均工作于最小传输点,输出信号为CS-DSB信号,通过调整DPMZM中PM调制器的偏置电压可抑制下边带信号,上路DPMZM的输出信号光谱图如图4所示,图中横坐标Δf表示相对于193.1 THz的频偏值。可见,相比一阶边带,载波被抑制了29 dB,输出信号为一路纯净的CS-SSB信号。
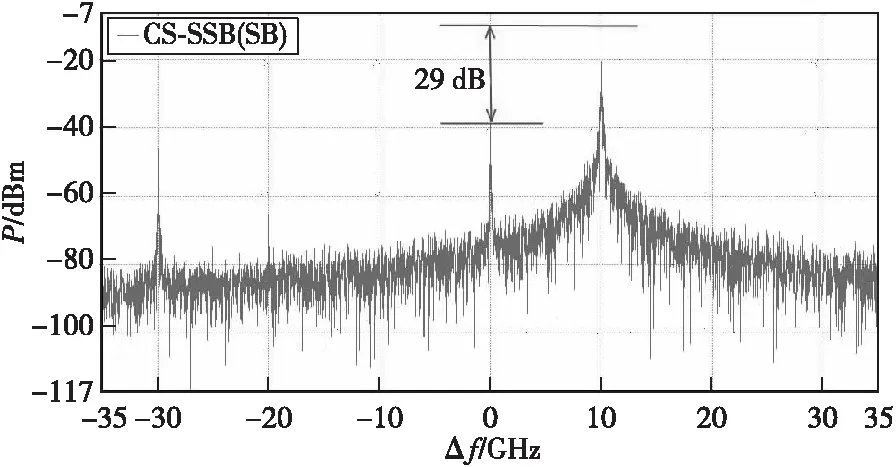
图4 抑制载波单边带信号输出光谱图Fig.4 Optical spectrum of the carrier suppressed single-sideband modulation signal
下路射频信号经过PM调制后,和上路信号进行合路输出,经功率合束器合并后输出信号的光谱图如图5所示,图中横坐标Δf的含义与图4一致。可见,已调的上边带信号和载波信号频谱清晰,且高阶信号得到了较好的抑制,功率相差超过30 dB。经PD拍频之后的微波信号功率谱如图6所示,为一路纯净的载波和一阶边带信号,因此所提微波光子移相器能够产生纯度很高的射频信号。另外,由图6可知,生成的射频信号中依然有高阶信号分量,这是由器件的非线性引起的,为减小高阶信号的影响,可通过采用滤波器或信号处理技术进行高阶信号抑制。
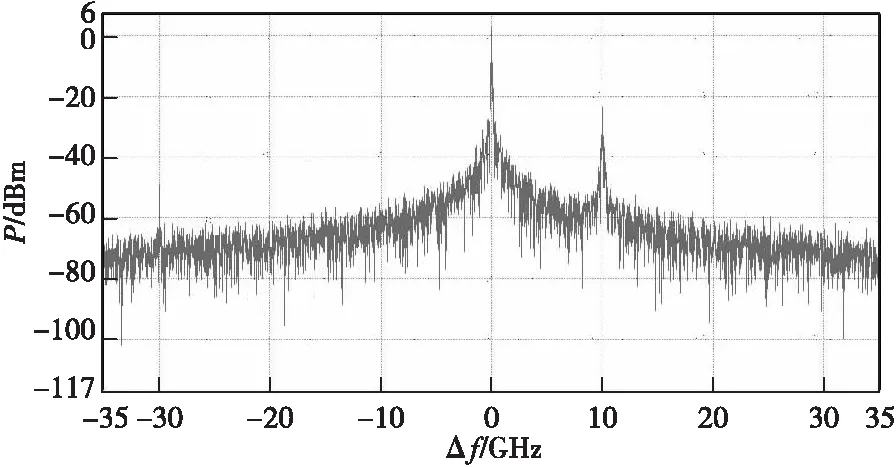
图5 功率合束器合并后的输出信号光谱图Fig.5 Optical spectrum of the output signal through the power combiner
3.1.2移相器性能
将下路中PM偏置电压在-5~5 V变化,即可得到不同相位的信号,如图7所示,可见所提方案能实现-180°~180°的连续相移。此外,仿真时设置输入射频信号的频率在2~20 GHz之间连续变化,通过调整偏置电压值,该方案均能输出稳定的相移信号。输出RF信号的功率曲线如图8所示,图中横坐标表示不同射频信号频率和不同偏置电压下的扫描点数。可见该移相器能平稳输出相移的射频信号,输出信号的功率波动仅为0.21 dB。另外,该移相器可通过电动控制PM的偏置电压,实现自动快速的相位调谐,完全能够满足相控阵测向系统的需求。
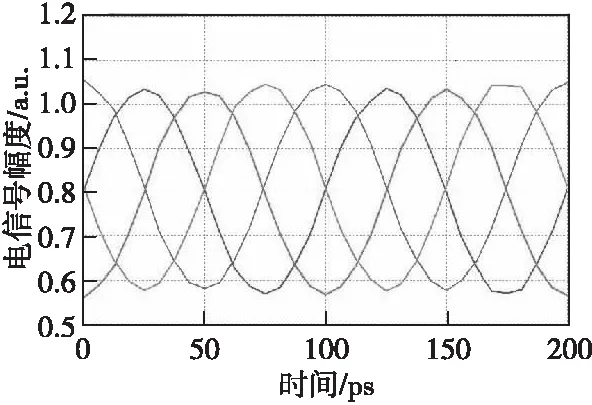
图7 不同偏置电压下输出的射频信号波形图Fig.7 Waveform of RF signal output under different bias voltage
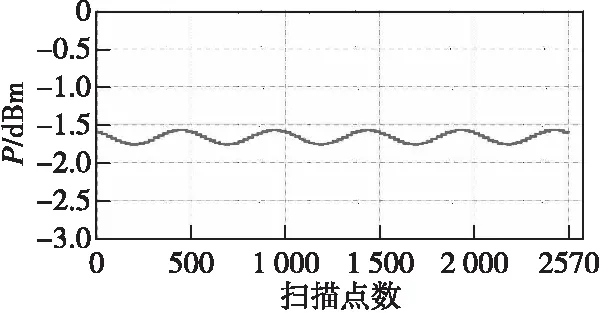
图8 不同射频频率及偏置电压下输出射频信号的功率曲线Fig.8 Power curve of RF signal output under different RF frequency and bias voltage
3.2 均匀圆形相控阵测向算法验证
均匀圆形相控阵测向算法是通过测量比较功率峰值来确定来波方向的估计值,因此评价天线阵扫描方向图的性能即可有效评价算法性能。仿真参数设置如下:M=1 000,N=8,d/λ=1.2,假设有两个目标信号,来波方向分别设定为(70°,30°)和(210°,50°),信号的信噪比SNR=10。该均匀圆形相控阵估计算法的功率谱如图9所示。图9中两个红点所对应的方向即为目标方向,明显可见,阵列能形成较窄的波束,算法能准确估计出来波方向。当然,在实际测向之前,还需估计出目标信号的个数,可根据具体的应用场景采用信息论准则、最小描述长度准则、有效检测准则、子空间投影等探测算法[3]。另外,为了更为直观地评价算法的性能,可通过方向角或者俯仰角的扫描方向图进行评价。
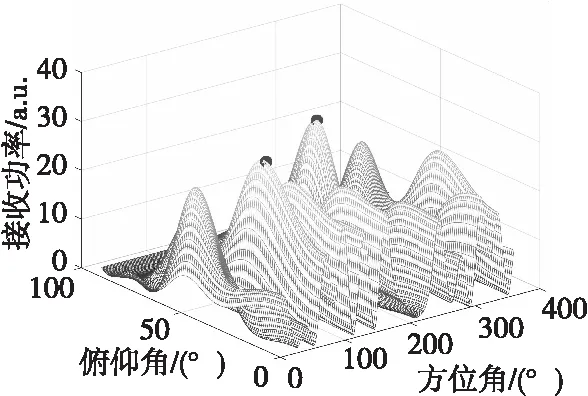
图9 均匀圆阵相控阵测向算法方向估计功率谱Fig.9 Power spectrum versus DOA directions of the proposed direction finding algorithm
3.2.1方位角及俯仰角
选取一个目标信号,分别设置在不同的来波方向(70°,80°),(70°, 0°),(260°,80°)和(260°,0°)。图10和图11分别表示方位角和俯仰角的方向图。从两图中可见:方位角对主瓣的影响不大,但俯仰角对方向图的影响较大,俯仰角越大(越接近圆阵的法线方向),方位角的主瓣越宽,方位角估计精度较差,而俯仰角的主瓣越窄,俯仰角的估计就越准确;当俯仰角较小时,即方向越接近圆阵平面时,方位角的主瓣越窄,方位角估计精度较高,而俯仰角的主瓣越宽,俯仰角的估计性能就越差。可见,方位角和俯仰角的估计性能随着来波方向呈现相反的变化趋势,可考虑调整其他因素改变算法的估计精度。为减小篇幅,接下来的分析中仅考虑方位角方向图的变化趋势,俯仰角情况类似,不再具体展示。
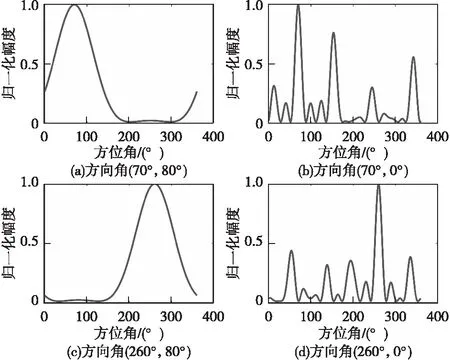
图10 不同来波方向下方位角方向图Fig.10 Azimuth pattern in different direction of arrival
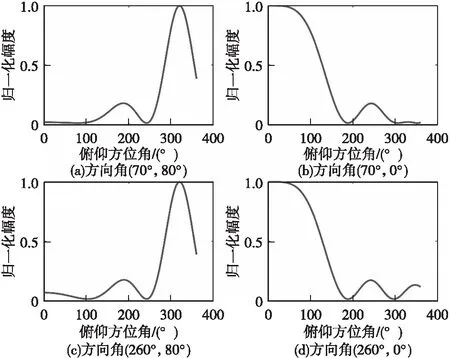
图11 不同来波方向下俯仰角方向图Fig.11 Pitch-angle pattern in different direction of arrival
3.2.2天线孔径
一般情况下,天线孔径是影响阵列性能的重要因素。本节将分析评价圆阵半径与信号波长的比值对测向性能的影响。设定一个目标信号的来波方向为(170°, 30°),分别设定d/λ=0.2、0.5、1、1.8,方位角的方向图如图12所示。可见,随着天线孔径(d/λ)的增大,天线主瓣的宽度变窄,即算法的估计精度变高。另外,随着天线孔径的增大,天线图出现的旁瓣逐渐增大,但对于目前的天线阵列(N=8),旁瓣不会增大到影响算法的估计性能(即不会超过主瓣)。可见,均匀圆阵可适用于不同的频段,工作带宽更大。
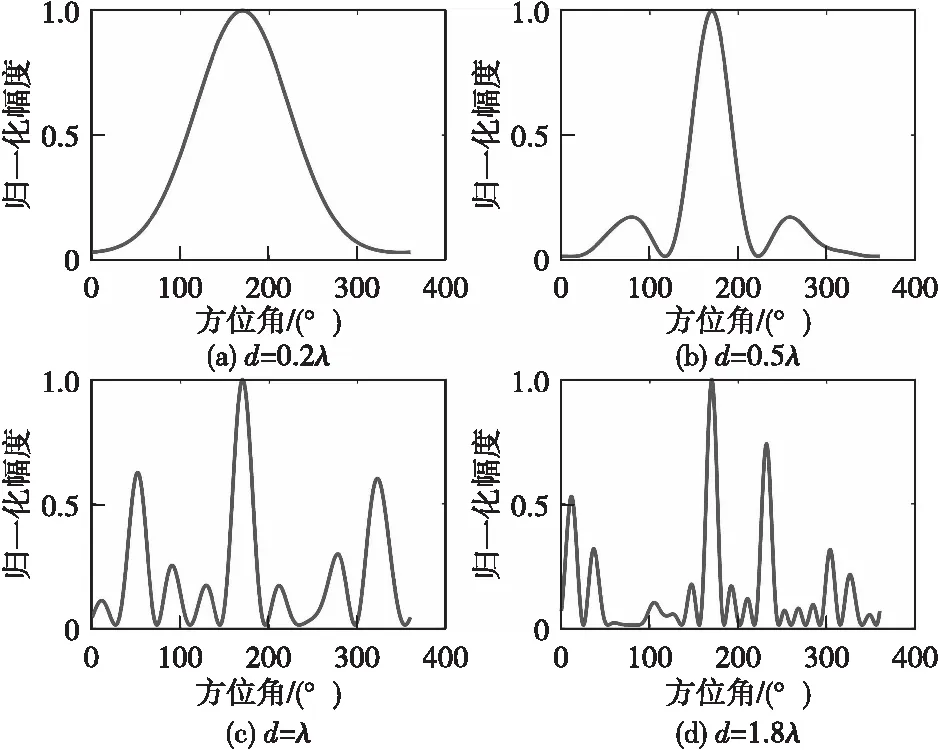
图12 不同天线孔径下方位角方向图Fig.12 Azimuth pattern with different antenna apertures
3.2.3天线阵元数目
考虑阵元个数N对测向算法性能的影响。设定单个目标信号的来波方向为(170°,30°),天线孔径为d/λ=1.8,天线阵元数分别设定为N=4、8、16、32,方位角的方向图如图13所示。可见,方向图主瓣几乎不受天线阵元数的影响。但是随着天线数目的增加,旁瓣会得到很好的抑制,减少了假峰的影响。另外,当N=4时,阵列方向图出现了多个假峰,即出现了珊瓣效应,算法难以正确分辨出来波方向值,这与均匀线阵的情况类似。现有的研究表明,当均匀圆阵中天线数目奇数不小于5偶数不小于6时,算法不会出现珊瓣效应。明显地,图13也从实验中证实了这一结论。
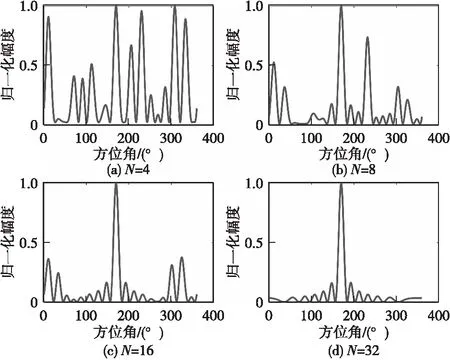
图13 不同天线阵元数下方位角方向图Fig.13 Azimuth pattern with different antenna array elements
4 结论
为克服传统电域移相器工作频段低、带宽窄、体积功耗大、易受电磁干扰等诸多“瓶颈”问题,同时为实现多个时频重叠信号的测向,本文基于微波光子移相器和均匀圆形天线阵的测向技术,提出一种微波光子移相器方案,利用DPMZM和PM分别实现CS-SSB调制和相位调制,合并两路信号后通过拍频即可产生移相的微波射频信号。仿真实验验证了测向算法的有效性,并证实了所提微波光子移相器方案能够产生稳定可调谐的微波移相信号,可满足相控阵测向系统的性能要求。目前的微波光子方案在瞬时带宽、频率覆盖范围、频率相关损耗等方面存在优势,但是在分辨率、灵敏度和系统集成等方面仍有限制,这些也是该领域目前重点关注和亟待解决的问题。
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
中国信息化(2022年5期)2022-06-13
导航定位学报(2021年3期)2021-06-19
合肥工业大学学报(自然科学版)(2020年7期)2020-08-05
空间科学学报(2020年4期)2020-04-22
电子制作(2019年15期)2019-08-27
现代计算机(2018年19期)2018-08-01
电子制作(2017年13期)2017-12-15
中学生数理化·七年级数学人教版(2017年1期)2017-03-25
北京航空航天大学学报(2016年6期)2016-11-16