六足防爆巡检机器人机械结构设计
2023-01-09 08:20蒋曙光
南方农机 2023年2期
蒋曙光 ,汪 明
(宜兴经济技术开发区应急管理局,江苏 宜兴 214200)
由于许多生产作业区域高度危险,人工不方便进行检查,即使能够进入,传统的人工巡检方式也存在劳动强度大、工作效率低、检测质量低、手段单一等弊端。因此,防爆巡检机器人也就应运而生,并且很快获得了市场的广泛认可。但是机器人的种类繁多,应用场合也各不相同,本文针对不同地形设计了一款六足防爆机器人,仿真结果表明,该机器人能适应各种复杂地形并圆满完成任务[1-6]。
1 腿部结构设计
六足防爆巡检机器人腿部设计是分布在圆盘形的身体上,因此每个腿都是一对三自由度的运动模型,每条腿都装有3个舵机,舵机安装在腿的3个关节上用来实现绕3个关节的运动,保证每条腿的正常运行[7-8]。用胫节来连接膝关节和踝关节,以确保每条腿的稳定。六足步行机器人的腿大致是模仿昆虫的腿,具有优越的机动性、实用性和灵活性。六足防爆巡检机器人使用三角步态,所以腿在行走过程中会交替支撑机器人及负载的重量,因此,机器人必须具有适当的刚度和承载能力。六足防爆巡检机器人的腿部结构仿生示意图,如图1所示。
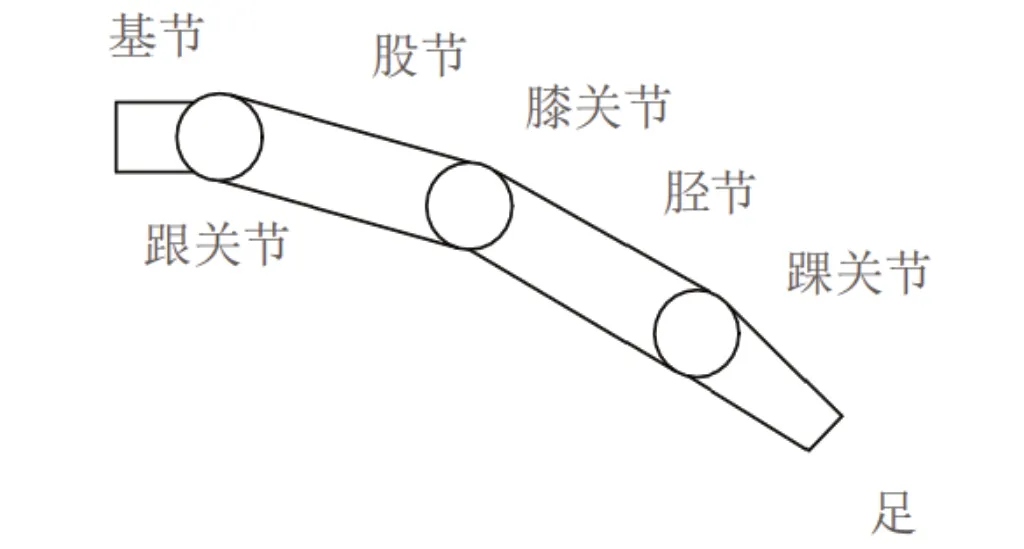
图1 六足步行机器人腿的结构示意图
2 机身的设计
六足防爆巡检机器人的六条腿分布在圆盘形状的机身上,身体由圆形金属制成,因为这样可以非常简洁,直径为150 mm。使用两个圆形的金属上下叠加组成机身,用螺钉固定上下两个圆形金属。
在机器人机身板上钻12个通孔,用来安装六足防爆巡检机器人的6条腿。通孔的直径应大于M3的带槽圆柱头螺钉的直径,以便螺钉可以穿过通孔。孔分布在半径为65 mm的圆周上,同一组中的孔相隔25 mm。
为了承受负载承重载荷的舵机重量,且不影响机壳的结构,机身钻孔时,12个孔分布在半径为50 mm的圆周上,中心也钻出了半径为40 mm的圆。这样可以大大减少零件的重量。机身是全身的中心,承载6 kg的载重量,旨在满足负载、强度和适当尺寸要求。以上设计在实现轻量化的同时也强调自身和组件的可靠性,易于维护。机身主板如图2所示。

图2 机身主板
3 基节的设计
基节部分作为机器人腿部的安装位置,应考虑安装舵机。这里使用两个片状部件形成基部。上基节片如图3所示。

图3 上基节片
基节的特征形状部分是腿部位置向前延伸,使腿部空间增大,减少腿部摩擦碰撞,长度为65 mm,前端宽25 mm,后端宽32 mm。分为上下两块,上基节片在主体前端设置4个安装孔,主体后端设置2个安装孔。当舵机转动时,由舵机的固定部分带动转向器的主体转动,构成六足防爆巡检机器人的跟关节。
关节舵机安装在下基节片上,下基节片同样在主体前端设置4个安装孔,主体后端设置2个安装孔,通过圆柱销与关节舵机板连接。下基节片如图4所示,下基节片和上基节片尺寸基本一样,只是下基节片的前端安装孔中间设置了一个通孔。

图4 下基节片
4 胫节片的设计
胫节又叫做中腿,它连接着膝关节和踝关节。膝关节和踝关节上的舵机输出轴和胫节固定。从小腿上端向下看,膝关节胫节片是通过旋转连接的关节执行器来发生运动的。胫节下端与踝关节以及足部连接,带动中足、下足[9-10]。
两个舵机的旋转轴和胫节片直接连接。从机器人机身向足部方向看下去,从腿的上端往下看,胫节片上端板连接到膝关节的舵机输出轴上,膝关节执行器带动胫节片的旋转。从底部到顶部,当脚的脚踝与脚踝转向器接触时,脚被固定,脚踝转向器的扭矩通过胫节片传递,将扭矩传递给六足防爆巡检机器人的身体运动。
其中一个胫节片需要安装两个舵机。由此引申出了传动胫节片的设计。传动胫节片的结构图,如图5所示。

图5 传动胫节片
胫节片长75 mm、宽22 mm、厚3 mm。胫节片两端预留11 mm的通孔以便舵机输出轴的安放,为固定舵机输出轴,在以预留通孔的圆心为圆心的圆周上分别预制4个螺纹孔。在胫节片的中心线的两侧分布两个通孔用以安装两根连接杆来连接两根胫节片。胫节片的结构图,如图6所示。

图6 胫节片结构图
5 小结
本研究对六足防爆巡检机器人的机身、基节及胫节片等机械结构进行了详细设计,并对相应结构参数进行了优化。仿真结果表明,该机器人能适应各种复杂地形,圆满完成了任务,为同类机器人结构设计提供参考。
猜你喜欢
电镀与精饰(2022年11期)2022-11-15
玩具世界(2022年2期)2022-06-15
现代电子技术(2021年3期)2021-02-02
黑龙江八一农垦大学学报(2020年2期)2020-05-06
自动化学报(2019年6期)2019-07-23
航天制造技术(2019年2期)2019-05-09
电子制作(2018年1期)2018-04-04
制造业自动化(2017年2期)2017-03-20
恋爱婚姻家庭(2015年27期)2015-12-19
恋爱婚姻家庭·养生版(2015年9期)2015-05-14