
基于modbus协议的AGV与电梯的通信研究
2023-01-11 09:14王国壮
安徽冶金科技职业学院学报 2022年4期
王国壮,邵 林
(安徽冶金科技职业学院 安徽马鞍山 243041)
1 AGV的历史及现状
AGV在国外的发展较早,诞生有60多年历史。20世纪80年代,AGV引导方式引入了无线制导技术,大大提高了AGV的效率,AGV发展成为生产物流设备的一大细分领域,成为企业自动化装备的重要组成部分。尤其在欧美等发达国家发展最为迅速,应用最为广泛,在亚洲也得到迅猛的发展和应用。
2 通讯方式
Modbus 协议是应用于电子控制器上的一种通用语言。通过此协议,控制器之间、控制器经由网络和其它设备之间可以通信,Modbus 协议定义了一个控制器能认识使用消息结构。
AGV与电梯通讯方式为全双工通讯,PLC与AGV调度系统通讯方式为Modbus TCP 通讯,其中电梯为服务端,AGV 调度为客户端。电梯发送给 AGV 调度系统的数据包包含了上一次 AGV 调度给电梯 发送的内容。控制模式分为手动模式与AGV 模式两种。手动模式下只接收按钮信号,AGV模式下只接收AGV小车信号。模式切换时电梯必须处于空闲状态且门已关好才可进行切换到AGV模式,AGV检测到模式为AGV模式且电梯无故障才呼叫电梯。电梯开门要自动保持开门状态,接收到关门信号才可以关门,且一楼增加声光报警灯用于提示。
3 设计思路
为了实现市开发区药品仓库两层楼面之间的物料运输,设计了一种基于西门子S7200SMART PLC控制的AGV物料运输系统。AGV与PLC之间采用Modbus 协议进行通信,其中AGV作为客户机,PLC作为服务器。AGV发出操作指令,PLC接受指令后控制电梯运行,并将运行结果反馈至AGV,以此往复循环。
4 动作流程
4.1 出库任务
(1)AGV放货:AGV给“模式切换”信号把电梯模式切换到AGV模式,读电梯当前模式反馈信号为AGV模式时,AGV给电梯“电梯去2楼”信号,当AGV读电梯到达2楼后,电梯自动开门并保持;
(2)当AGV读电梯状态“开门到位”信号后,AGV进入电梯轿厢放货;
(3)AGV放货完成并完全驶出电梯并到达安全位置后,AGV给关门信号,电梯开始关门,然后再给电梯“电梯去1楼”信号,电梯自行检测关门到位后再开始向目标楼层升/降;
(4)当AGV读电梯到达1楼后,电梯自动开门并保持;
(5)人工取货:AGV读电梯状态为“开门到位”后,AGV再撤销“模式切换”信号,并等待人工取货,当人工取完货后,人工按关门确认按钮,当AGV读到AGV可用模式信号,电梯才可执行下一个AGV任务。
4.2 入库任务
(1)人工放货时,人工按开门信号,电梯自动开门并保持,人工放货完成,VMS才可生成任务传给调度,人工按关门确认按钮,电梯关门;
(2)AGV收到“关门到位”信号后,AGV给“模式切换”信号把电梯模式切换到AGV模式;
(3)读电梯当前模式反馈信号为AGV模式后,AGV给电梯“电梯去2楼”信号,电梯到达2楼后,电梯自动开门并保持;
(4)当AGV读电梯状态“开门到位”后,AGV进入电梯轿厢取货;
(5)AGV取货完成并完全驶出电梯并到达安全位置后,AGV给关门信号,电梯开始关门,最后AGV再撤销“模式切换”信号,电梯进入人工模式。
5 PLC与AGV通信设置
5.1 TCP协议数据交换
TCP通信为面向连接的通信,需要双方都调用指令以建立连接及交换数据。S7-200 SMART与AGV之间通过ModbusTCP通信,在AGV建立客户,在S7-200 SMART 调用Open User Communication 库指令,TCP_CONNECT, DISCONNECT,TCP_SEND, TCP RECV。客户端主动建立连接作为主站,S7-200 SMART服务器作为从站被动建立连接,AGV与电梯通信流程图如图1所示。
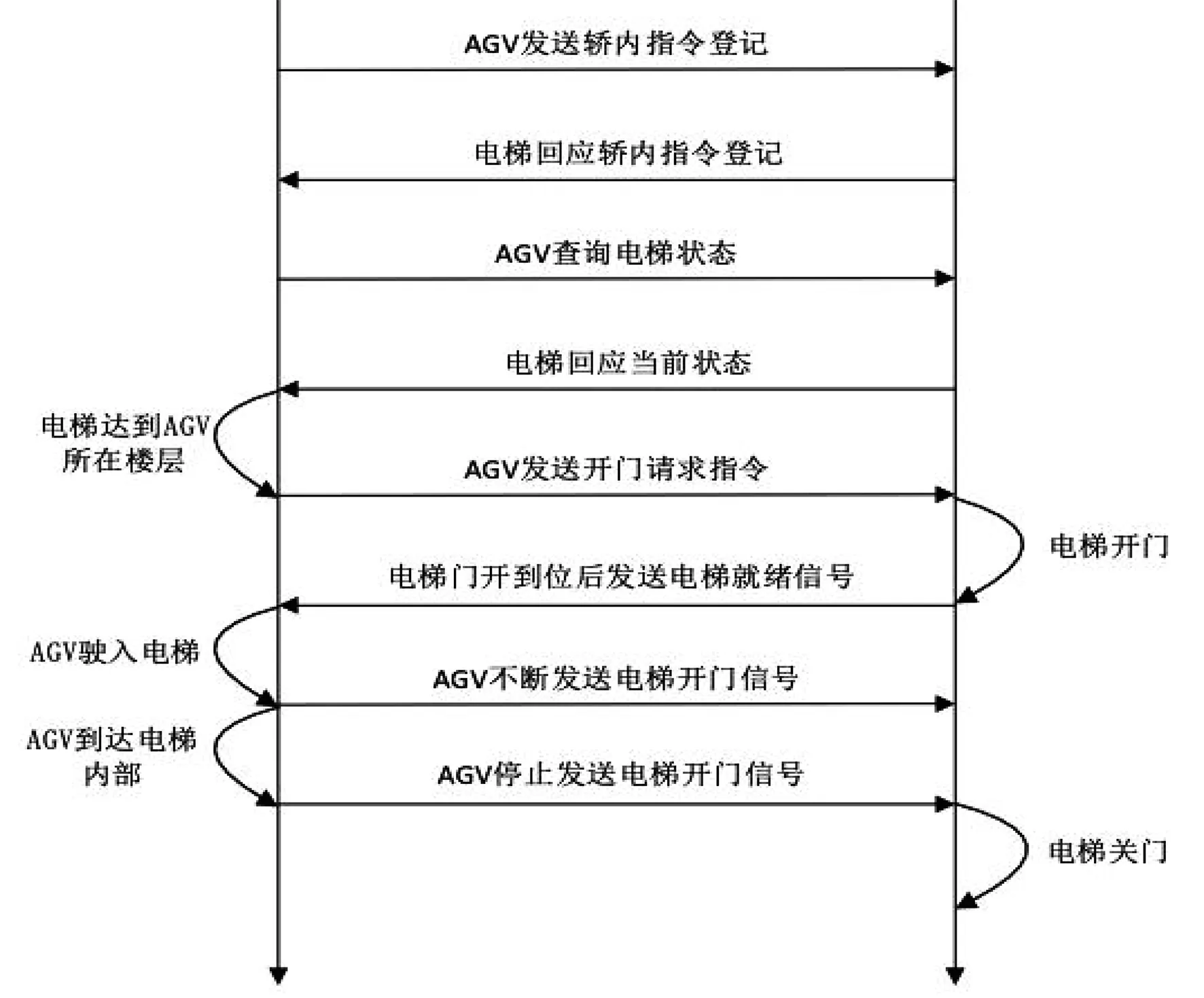
图1 AGV与电梯通信流程图
通信报文头:FF FF FF FF FF FF FF FF;
有效交换数据:00 01 00 01 00 00;
通信校验位:00 00;
通信报文尾:EE EE EE EE EE EE EE EE;
有效数据交换如表1所示。
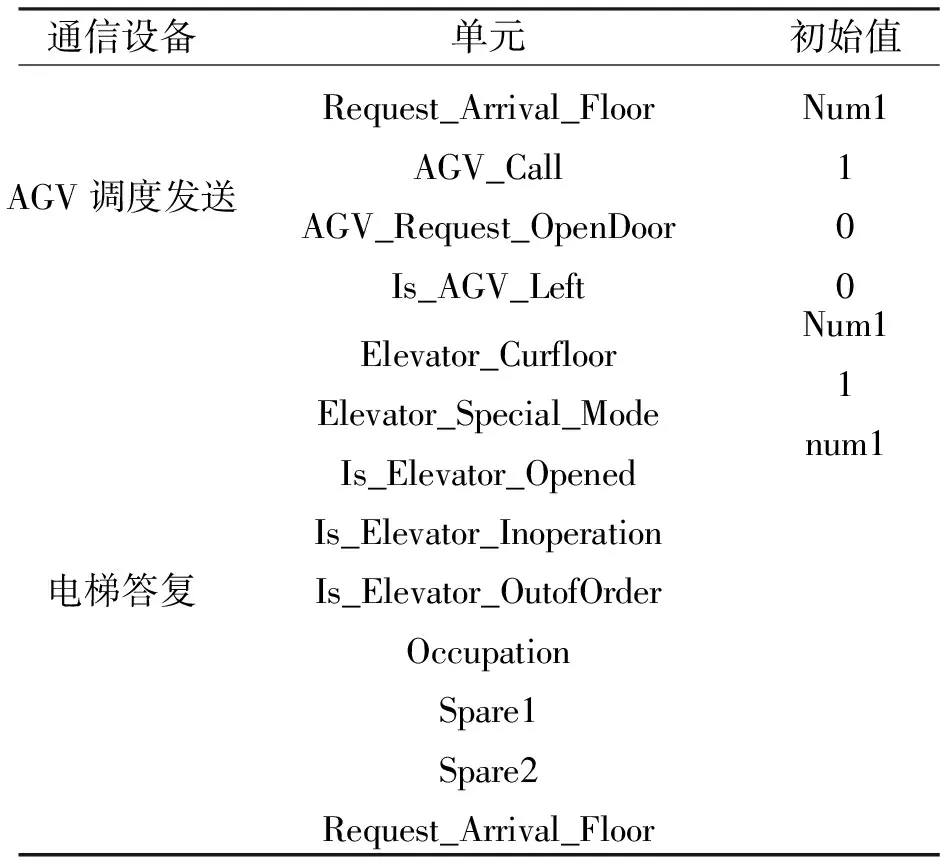
表1 有效数据交换表
5.2 PLC程序设计
LD M0.7
EU
MOVW MW7, VW58
AENO
MOVW MW9, VW60
AENO
MOVW MW11, VW62
AENO
MOVW MW13, VW64
AENO
MOVW MW15, VW66
AENO
BMB VB93, VB68, 4
AENO
S M0.6, 1
LD SM0.0
= L60.0
LD SM0.0
= L63.7
LDN SM0.0
= L63.6
LD L60.0
CALL TCP_CONNECT:SBR1, L63.7, L63.6, 1, 0, 0, 0, 0, 0, 2000
LD SM0.0
= L60.0
LD M0.6
EU
= L63.7
LD L60.0
CALL TCP_SEND:SBR2, L63.7, 1, +34, &VB50, M0.3, M0.4
6 结论
随着现代物流业和工业自动化技术的快速发展,AGV与电梯的交互应用变得越来越重要,无论是企业还是商场都需要两者之间的相互配合。工业网络与互联网的融合,也促使AGV应用市场大有可,AGV已成为企业物流配送系统的重要组成部分。为了实现配送系统自动化、智能化地完成任务,必须要实现AGV自动上下电梯,因此实现AGV与电梯系统之间的有效通信显得尤为重要。为了完成AGV与电梯间的高效通信,本文提出基于Modbus TCP协议的安全交互系统,通过设计以AGV作为客户机,PLC作为服务器的通信方式。文中充分发挥西门子S7200 SMART PLC自由口通信的优势,把PLC作为AGV与电梯通信的枢纽,通过系统编程实现AGV与电梯之间的有效通信。同时,利用PLC强大的逻辑功能,实现电梯的逻辑动作和安全监控,最大程度上保证AGV与电梯交互的安全性和可靠性,具有一定的参考价值。
猜你喜欢
茶叶通讯(2022年2期)2022-11-15
茶叶通讯(2022年3期)2022-11-11
机械研究与应用(2022年4期)2022-09-15
中国新闻周刊(2021年2期)2021-01-29
小溪流(故事作文)(2018年10期)2018-12-28
小学生学习指导(低年级)(2018年3期)2018-01-31
创作与评论(2017年11期)2017-06-30
小学生时代·综合版(2016年7期)2016-05-14
红蜻蜓·低年级(2015年11期)2016-02-02
小说月刊(2015年4期)2015-04-18
