
基于包应用标准的紫外极光成像仪通信控制系统的设计与实现*
2023-01-14 12:49刘晓红王咏梅王天放
空间科学学报 2022年6期
刘晓红 王咏梅 王天放
1(中国科学院国家空间科学中心 北京 100190)
2(中国科学院大学 北京 100049)
3(天基空间环境探测北京市重点实验室 北京 100190)
4(中国科学院空间环境态势感知技术重点实验室 北京 100190)
0 引言
极光是日地空间物理现象中一种可见的现象[1],是由来自太阳的高能带电离子流在地球磁场作用下与高层大气的分子原子碰撞产生的。极光辐射光谱覆盖红外到极紫外波段,反映高层大气分子、原子光谱,极光区的粒子沉降,以及引起高层大气主要成分垂直分布的变化。通过对极光的远紫外波段进行探测,可以获得地球中高层大气粒子及密度信息[2],研究地球磁场与太阳风的相互作用,更好地了解空间大气。
太阳风-磁层相互作用全景成像卫星(SMILE)工程是中国首次与欧空局进行深度合作的空间科学探测任务,紫外极光成像仪(UVI)是该卫星工程重要的有效载荷之一。其主要科学目标是实现对极光形态的连续成像探测,观测极光卵/极盖的位置、大小、强度分布等追踪极光形态随时间和空间变化的过程,获得沉降粒子流量及能量等信息。
电控箱通信与控制系统作为紫外极光成像仪的重要组成部分,负责与探测头部和载荷平台之间的指令通信以及数据接收、处理、下传的重要任务。本文分析了通信与控制系统的工作原理和各功能模块设计,为与国际对接,通信上使用了欧洲空间标准化组织(ECSS)的包应用标准[3,4](PUS)。为满足电子学的集成测试以及飞行需求,该标准定义了地面到太空的应用级接口[5]。测试结果表明,通信与控制系统能够正常运行,可靠实现各项功能,满足任务指标要求,PUS 的应用使得卫星数据的交互和处理更便捷有效,有助于实现中国航天器遥控遥测系统的标准化。目前中国对PUS 的应用缺乏从工程角度阐述软件的具体实现过程及验证。
1 系统组成与工作原理
紫外极光成像仪(UVI)由探测头部(UVI-C)和电控箱(UVI-E)组成,探测头部为基于ICMOS 的成像仪,电控箱通信与控制系统主要负责与探测头部和载荷平台(PLM)通信,其工作原理如图1 所示。系统工作时,电控箱通信与控制系统FPGA 通过RS422 串行总线接收来自载荷平台的指令和时间码信息,经解析处理,对属于探测头部的指令通过RS422 进行转发,对属于电控箱的指令直接执行,对时间码信息进行更新,同时电控箱接收来自探测头部的科学数据和工程参数,科学数据接收后先缓存至系统外设的SDRAM 中,工程参数接收后合并电控箱部分的工程参数进行打包,按照协议通过RS422 发送至载荷平台。
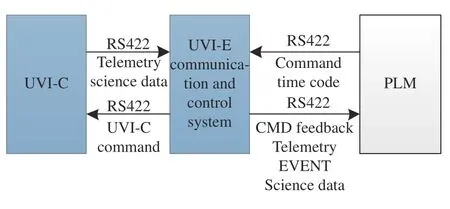
图1 电控箱通信与控制系统工作原理Fig.1 Diagram of communication and control system
2 PUS 业务选择与实现
紫外极光成像仪与载荷平台的接口设计采用PUS 标准,物理层选用异步RS422 协议,波特率为1 Mbit·s-1。应用层按照ECSS-E-70-41 A[3,4]定义的PUS 标准执行。PUS 标准描述了用于传输请求的遥控包格式和传输报告的遥测包格式与内容,这两个数据流完成载荷状态监测和控制。表1 为PUS 包结构,其中遥测和遥控的数据域头和包数据域可变,表2 为PUS 遥控包数据域头结构定义,表3 为遥测包数据域头结构定义。遥控包和遥测包均包含业务的服务类型和子服务类型。对于遥控数据包,包数据域内容为具体指令内容或者时间码,对于遥测数据包,包数据域内容为发送的具体科学数据、工程参数以及其他数据包内容。

表1 PUS 包结构Table 1 PUS packet structure

表2 PUS 遥控包的数据域头结构Table 2 Data field header structure in tele-command packet

表3 PUS 遥测包的数据域头结构Table 3 Data field header structure in telemetry packet
PUS 标准支持对业务的裁剪,紫外极光成像仪根据需求对PUS 业务进行选择,表4 列出了实际使用的业务类型。其中,遥控确认业务、时间管理业务、测试业务、探测头部指令业务以及电控箱指令业务用于系统对指令的处理,大数据上传业务用于对科学数据的处理,工参和诊断数据报告业务用于对遥控工程参数的处理。为增加系统设计的可靠性,提出故障诊断的方法[6],使用事件报告业务对系统故障进行处理。
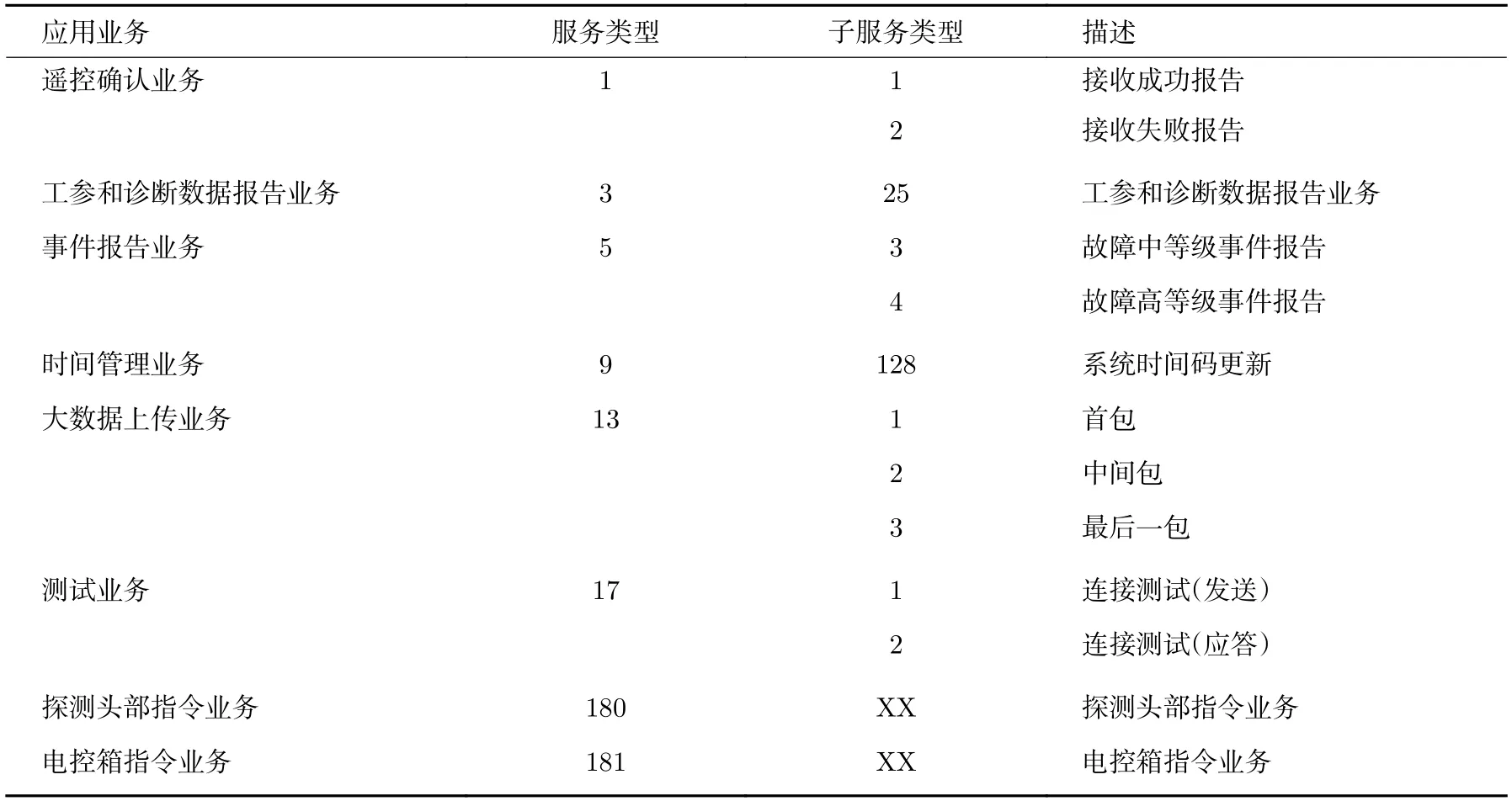
表4 选择的业务类型Table 4 Selected service for the project
3 电控箱通信与控制系统设计
电控箱通信与控制系统基于FPGA 实现,包括的功能模块主要有指令接收与处理、科学数据采集和处理、故障诊断与事件包生成、遥测工程参数包生成以及数据包仲裁发送,数据流如图2 所示。
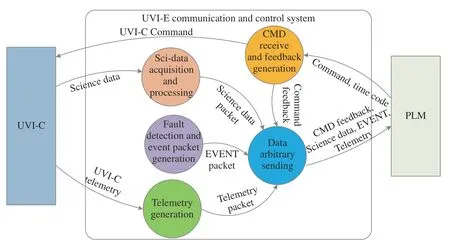
图2 电控箱通信与控制系统数据流Fig.2 Data flow of communication and control system
3.1 指令接收与处理
电控箱通信与控制系统负责接收来自载荷平台的指令,接收的指令按照PUS 业务进行区分,该模块应用到的PUS 业务包括遥控确认业务、时间管理业务、测试业务、探测头部指令业务和电控箱指令业务,根据接收到的指令业务类型,进行相应的应答或者操作。
当电控箱通信与控制系统FPGA 接收到来自载荷平台的指令后,对指令的PUS 包头(APID)、包类型、包长以及校验和进行判断,若都正确,按照PUS协议向载荷平台发送“指令接收成功报告”,如果错误,则需要按照协议发送“指令接收失败报告”。对于测试指令,需要发送“连接测试应答”到载荷平台。对于时间码信息,不发送反馈,只更新内部时间码。通过指令服务类型判断为属于探测头部的指令,需要在接收后100 ms 内将指令发送至探测头部;若判断为属于电控箱的指令,则立即执行该指令。指令接收和处理流程如图3 所示。
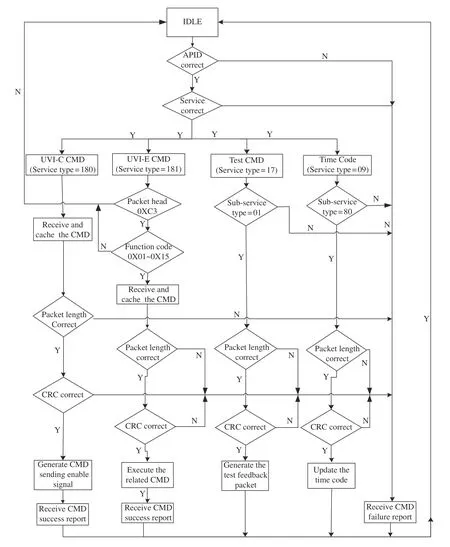
图3 基于PUS 的指令接收和处理流程Fig.3 Data flowchart of command receive and process based on PUS
3.2 科学数据采集与处理
科学数据来自探测头部,电控箱通信控制系统接收探测头部的科学数据,判断包头和包长正确无误后,更新包头中的工程参数数据,存储到SDRAM 中,等待仲裁模块判断发送端RS422 空闲时,按照PUS 大数据上传业务,分包发送到载荷平台。发送的每小包数据量为886 Byte(最后一包为不定值)。一包科学数据包括数据包头、图像数据和数据包尾,其中包头固定为242 Byte,包尾16 Byte,图像数据最大数据量为3 145 728 Byte。
3.3 故障诊断与处理
为保证系统的可靠性,电控箱通信与控制系统根据遥测参数的门限值对遥测参数进行实时监测,监测到异常跳变后通过PUS 事件报告业务向载荷平台下发异常报告,同时生成异常处理指令,确保异常情况的及时处理。PUS 事件报告业务分为中等级事件和高等级事件。对于中等级事件,载荷平台接收到该事件后需上报至地面系统;对于高等级事件,载荷平台直接切断电控箱电源。
3.4 遥测工参包生成
电控箱通信与控制系统接收探测头部的工程参数后,与电控箱自身采集的工程参数组包,发送到载荷平台。工程参数内容共232 Byte,包括134 Byte头部工程参数,98 Byte 电控箱工程参数。当探测头部未工作时,电控箱每隔10 s 自动更新电控箱工程参数内容进行发送。
3.5 数据仲裁发送
电控箱通信与控制系统通过RS422 与载荷平台进行通信,传输速率为1 Mbit·s-1。由于需要发送到载荷平台的数据包内容包括指令反馈、故障事件包、工程参数以及科学数据包,每种数据按照对应的PUS格式整理,生成数据请求信号,发送时需要按照指令反馈-事件信息-工程参数-科学数据包优先级顺序进行仲裁,依次判断数据请求信息发送相应数据。
4 测试结果与分析
探测头部模拟器可以按照探测头部的功能自动生成工程参数和科学数据原始数据,上位机软件可以模拟载荷平台接收数据,目前通过探测头部模拟器、上位机软件与电控箱通信与控制系统完成系统联试,对测试结果进行了分析。结果表明电控箱通信与控制系统工作稳定,完成了指令的接收和处理,科学数据接收、存储和组包格式正确,图像数据经过去包头包尾处理后与探测头部模拟器生成的结果一致。故障诊断与处理方法正确有效,工程参数组包格式正确,各数据包连续,无数据丢失情况,通信与控制系统各项测试结果均满足任务需求。图4 给出了探测头部模拟器生成的原始图像与上位机接收科学数据并对图像进行反演后的图像对比,图像大小为1024×1024×2 Byte,数据接收及传输误码率为0。
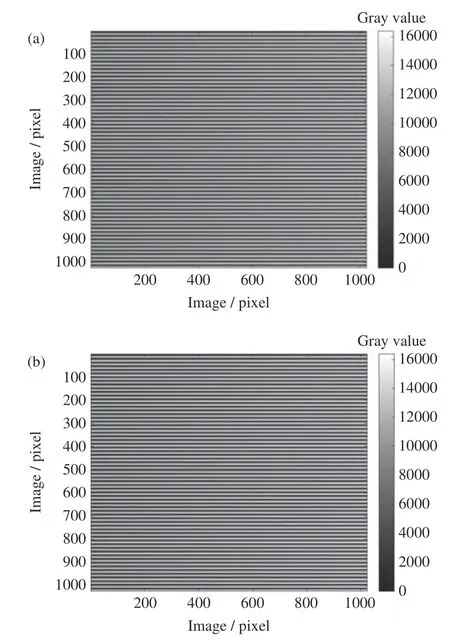
图4 原始数据图像(a)与模拟的载荷平台接收数据反演图像(b)的对比Fig.4 Comparison between the original image (a)and the inversion image (b) received from the simulated payload platform
5 结论
针对中国卫星遥控遥测系统格式不一致且缺乏灵活性的问题,根据SMILE 卫星紫外极光成像仪的任务需求,通过研究PUS 标准业务,设计研制了基于该标准的电控箱通信与控制系统,详细描述了PUS 标准在该系统各模块中的应用。经过与头部模拟器进行联合测试,结果显示该通信与控制系统测试结果满足任务需求。PUS 标准的应用提高了卫星通信系统的灵活性和通用性,研究结果可为卫星快速研制提供参考。
猜你喜欢
计算机与数字工程(2022年3期)2022-04-07
遥测遥控(2022年1期)2022-02-11
空间科学学报(2021年4期)2021-08-30
民用飞机设计与研究(2020年4期)2021-01-21
电子制作(2019年16期)2019-09-27
民用飞机设计与研究(2019年2期)2019-08-05
民用飞机设计与研究(2019年2期)2019-08-05
电子制作(2019年11期)2019-07-04
物联网技术(2018年8期)2018-12-06
百科探秘·航空航天(2017年12期)2018-01-31
