
基于无人机的天线测量系统研究
2023-01-29 08:55宋淼杉罗志明王正鹏
遥测遥控 2023年1期
宋淼杉,罗志明,王正鹏
(1 北京航空航天大学电子信息工程学院 北京 100191;2 北京中测国宇科技有限公司 北京 100191)
引言
现代天线测量一般在微波暗室中进行,在实际工况下,受温度、湿度变化、现场安装支架、附近天线等耦合因素影响,天线辐射方向图都有可能发生变化。为了评估天线在实际工作环境中的性能,现场天线测量技术受到越来越多的关注。现场测量天线特性的典型方法是在工作现场旋转待测天线并作为发射端,由远端的接收探头天线连接频谱仪接收,也可以将探头天线连接信号源发射信号,由待测天线接收信号。在对待测天线进行现场测量时,为了减少地面反射效应的影响,可以借助一些设备和技术将发射器或接收器放置在高出地面的位置。探头天线围绕待测天线旋转能够对基站天线等固定式天线进行测量,但这需要精确的相对位置关系,并保持较高的稳定性。尽管实施难度大,研究人员仍然提出了气球承载技术[1]和直升机载技术[2,3]来实现这种测量。近年来,迅猛发展的无人机(UAV)技术为现场天线测试带来了一个新的选择。
借助无人机已经能够对天线辐射系统进行现场测试评估,这种测量虽然不如在暗室环境内测量的精确,但可以将环境影响带入方向图测试中。2014 年后,有国外学者开始研究利用无人机进行天线测量的方法[4]。近几年来,国内外很多研究人员尝试利用小型无人机对大型天线进行测量,伴随着无人机硬件和天线测量后处理技术的不断发展,基于无人机的天线测量系统也取得了长足进步。
目前基于无人机的天线测量系统主要依靠无人机上的功率检测器或频谱分析仪连接探头天线获取待测信号幅度值,由数传系统将测试结果和无人机位置、姿态信息传输到地面站PC机,然后进行数据记录和处理;也可以在无人机上配备射频发射机作为信号源,将频谱分析仪放在地面站与被测天线相连,充当接收机,连接到频谱分析仪的PC机仍然用作数据记录器。在被测天线(AUT)周围的无人机飞行路径是在测试之前预先定义的。
1 基于无人机的远场测量方法
起初对基于无人机的天线测量系统研究主要是基于无人机的远场测量方法,远场测量方法是对辐射方向图的直接测量,无人机在天线的远场区域直接获取被测天线的辐射功率数据。在远场测量中,由于无人机的飞行路径需要满足远场条件,这种方法主要应用在对基站天线等中低增益天线的测量。
2014 年,意大利的Giuseppe Virone 等人提出了一种基于小型无人机的天线方向图检测系统,用来测量VHF/UHF 频段天线的方向图[4−6],系统中无人机的装配图和无人机飞行路径规划如图1 所示。该系统使用配备了一个连续波射频发射机的小型的六旋翼无人机作为远场测试源,在真实环境中表征被测天线。无人机的位置跟踪使用具有厘米级精度的机动全站仪,使用频谱分析仪检测被测天线的输出信号振幅,使用GPS 时钟同步接收机同步所有数据。通过数据处理,重建了被测天线沿着无人机飞行路径的接收功率方向图。
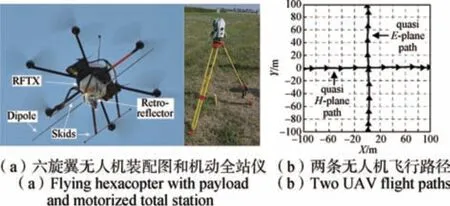
图1 一种基于小型无人机的天线方向图检测系统[4]Fig.1 Antenna pattern verification system based on a micro UAV
上述系统无人机扫描测试的飞行路径是两条互相垂直的直线轨迹,分别对应于被测天线的E面和H 面,如图1(b)所示。被测天线位于参考系统的中心,可以测量得到天线E 面和H 面的方向图。但随着被测试天线到无人机方向观察角度的增大,无人机飞离天线的距离也逐渐变大,导致空间路径损耗增加,该变化范围直接影响地面接收机的动态范围。因此,在上述系统的基础上,为了提高飞行效率和飞行精度,并确保足够且均匀的采样,文献[7]在平面和曲面上进行二维方向图的测量,提出了三种扫描策略:笛卡尔光栅、径向光栅和三维方位光栅,如图2所示。文献[8]也对无人机的飞行扫描策略进行了相关研究。由于机载GPS 导航控制器的精度有限,以及外部干扰的影响,实际飞行轨迹可能与计划的飞行轨迹相差几米,GPS 精度不足以计算具有所需精度水平的AUT 模式,因此文献[7]提出了添加一个差分全球导航卫星系统来测量飞行轨迹,该系统提供厘米级的精度。
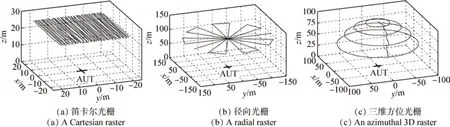
图2 三种扫描策略[7]Fig.2 Three scan strategies
文献[4]中提出的系统已经对两个低频天线进行了测量验证,在150 MHz 处测量了双锥天线,在408 MHz处测量了对数周期天线。文献[9]、[10]中提出的天线方向图测试系统也用于测量对数周期天线。文献[11]中提出了使用携带小型发射器的无人机校准用于太阳光谱分析的6 米碟形望远镜,即6 米抛物面反射面天线,图3 给出了此测量系统组件的总图。文献[12]介绍了使用无人机测量布莱恩天文台的5米碟形望远镜。以上这些测量都是基于无人机的远场测量方法,对于大型反射面天线来说,远场距离相对较远,测量时要注意确保位于远场区。近几年来,国内也开展了一些基于无人机的天线远场测量的研究和设计[13−18]。
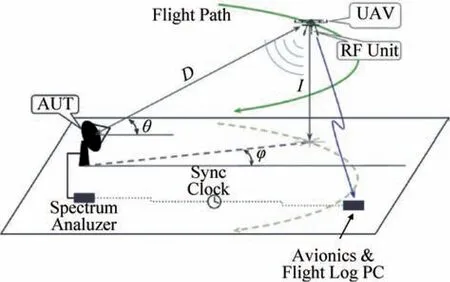
图3 测量系统组件的总图[11]Fig.3 General diagram with the components of the measurement system setup[11]
总结来说,无人机远场测量方法的整体思路就是让无人机搭载功率检测设备按照设定的路径飞行,在被测天线远场区采集辐射功率信息,即可以得到天线辐射方向图的信息。对于远场测量来说,采集点可以相隔较远,对无人机飞行的位置精度要求不用特别严格。但是远场测量需要满足远场条件,测试距离远,测试时间长。
2 基于无人机的近场测量方法
上一节介绍的基于无人机的天线测量系统对方向图的远场直接测量,无人机在天线的远场区域获取数据。对于在高频段工作的天线或电大尺寸天线来讲,远场区域可能在距离AUT 数百米之外。虽然在足够大的开放区域内仍然可以采用远场测量,但全模式测量的飞行路径较长,由于无人机的续航时间有限,可能需要多次飞行,并且距离太远影响扫描路径精度。因此,研究基于无人机的近场测量方法就尤为重要。与远场测量相比,要进行精确的近场天线测量,需要测量稳定且无干扰的射频振幅和相位数据,并需要知道无人机的精确3D位置及其方位,以满足近场-远场变换(NFFFT)的需要。
德国Aeroxess UG 公司开发“Hercules One”无人机,如图4 所示,并提出了基于Hercules One无人机的近场(NF)天线测量技术[19],该技术需要在无人机上安装机载探测天线,使用光纤电缆在机载探测天线和地面AUT 之间以足够的精度传输射频测量信号,测量过程中保证射频测量信号的幅度和相位误差都在可接受范围内。该系统还考虑了电源管理的问题,由地面电线供电,提供无限飞行时间。此外,为了确保近场测量点的密度足够均匀,系统使用激光跟踪仪进行激光定位,用于精确测量近场测量点的3D 位置[20]。文献[21]重点讨论了上述无人机天线近场测量系统在设计、开发和运营阶段的特殊挑战以及解决办法。

图4 “Hercules One”无人机模型图[19]和实物图[21]Fig.4 The model[19] and photo[21] of "Hercules One" UAV
文献[22]也提出了一种基于无人机的近场测量装置,该装置同样考虑了测量辐射场的幅度大小和相位,使用矢量网络分析仪(VNA)进行现场测量,使用激光跟踪器测量探测天线的位置,如图5所示,无人机将探测天线移动到测量位置,同时通过光纤链路将其连接到VNA,树莓派(RPi)用于读取和存储来自VNA 和激光跟踪器的数据,以及来自无人机的方向数据。该系统对双脊喇叭天线进行了现场测量。文献[23]对20 MHz 参考地平面天线进行了现场近场测量。文献[24]介绍的无人机近场天线测量系统,与以上介绍的无人机天线测量装置不同,该系统提出使用双通道宽带软件无线电(SDR)代替矢量网络分析仪,测量双极化探头天线端口处的信号。探头天线的位置和方向用基于虚拟现实(VR)应用开发的6-D 跟踪系统确定,避免了使用昂贵的激光测量设备。

图5 测量装置的示意图[22]Fig.5 Schematic drawing of the measurement setup
基于无人机的近场测量技术的关键是先进的NFFFT 算法,以上提到的系统均使用快速不规则天线场变换算法(FIAFTA)[25],这种算法基于多级快速多极子方法(MLFMM)相关的加速概念。这种新颖的计算电磁方法不仅限于近场(NF)到远场(FF)转换,还能够滤除非理想环境的干扰,如建筑物的回声或地面反射。与传统的NFFFT 转换相比,FIAFTA 最大的优点是能够以高效和准确的方式将不规则和任意采样的NF 测量数据转换为FF状态。FIAFTA 方法的准确性仅取决于电磁场分量大小和相位的准确测量,以及探头相对于AUT位置的确定。
以上介绍的近场天线测量系统均需要测量接收信号的幅度和相位,文献[26]提出了一种紧凑、低成本的无人机天线测量系统(UASAM),如图6所示。该近场测量系统使用低成本功率传感器获得的振幅测量值,通过无相位源重建方法(pSRM)恢复相位信息[27]。pSRM 是一种迭代相位恢复技术,允许恢复表征AUT 的等效电流分布。根据这些等效电流,应用近场到远场变换来计算AUT 辐射方向图,从NF 无相位测量中进行AUT诊断和表征的能力,由于使用了无相位源重建方法,可以处理任意几何形状的NF 网格。该系统首先在S 波段和C 波段对喇叭天线阵列进行了测量验证[26],之后又对圆极化天线阵列进行了测量和诊断分析[28],还对基站收发天线进行了测量分析[29],这些测量证明了使用小型低成本无人机天线测量系统对天线进行现场诊断和表征具有良好的可行性。UASAM 系统通过实时运动学(RTK)系统实现厘米级精度数据地理参考,是一个利用GNSS载波相位的差分全球导航卫星系统。系统还集成了激光高度表,以提高高度的测量精度。文献[30]和文献[31]介绍了基于UASAM 的改进系统,提出了一种基于无人机上双探头装置同时获取两个采集面上近场振幅的新方法,此系统的采集时间和测量不确定性大大减少。通过测量偏置反射面天线,将测量结果与暗室内的测量结果进行比较,验证了系统的性能。

图6 无人机天线测量系统(UASAM)和无人机装配图[26]Fig.6 Unmanned aerial system for antenna measurement (UASAM) and UAV with payload[26]
3 无人机外场测量方案
3.1 测量方案介绍
本文提出了一种无人机外场测量方案,无人机搭载信号采集设备与小型控制PC,根据设定的飞行路径以AUT 为中心绕飞,信号采集设备获取对应空间位置的经纬度坐标以及功率数据,机载控制PC利用数据链将数据回传至地面控制PC。整个测试系统由UAV 端、地面端、数据链三部分组成:UAV 端配备小型控制PC 机、便携式频谱仪、双极化探测天线和GPS模块,如图7所示;地面端包含地面控制PC 机、RTK 定位模块和全站仪;UAV 端与地面端通过数据链进行数据交互,地面站PC 机实时接收UAV 端的回传数据,并将测试结果实时显示。

图7 无人机装配图Fig.7 UAV with payload
此系统被应用在外场测量了S波段标准增益喇叭天线辐射方向图,图8给出了测量现场的布置情况,作为AUT 的标准增益喇叭天线被架设到20 米高度,以减少地面反射干扰,信号源输出信号,经过放大器放大后由AUT 发射信号,无人机端接收AUT 的辐射信号。图9 给出了测量过程中无人机的飞行路径,这个球面轨迹由一系列圆形轨迹构成,所有采样点都位于一个半径为20 米的球面上,与AUT 之间的距离保持恒定,这样可以保证每个采样点接收信号的路径损耗大小相同。单个圆形路径具有恒定的高度,这提供了较高的飞行精度和飞行效率。

图8 测量现场的布置Fig.8 Layout of the measurement site
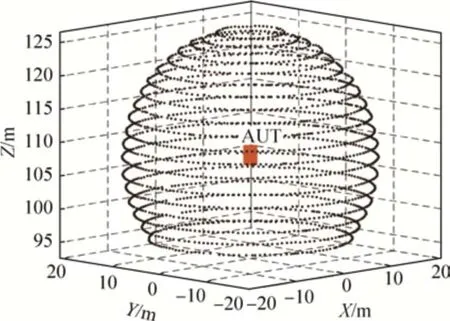
图9 无人机飞行轨迹Fig.9 The flight path of UAV
3.2 测量结果及误差分析
为了验证测量系统的可行性和准确性,我们在外场进行了多次测量,并将测量结果与仿真结果进行了对比,如图10 所示,多次测量结果与仿真结果基本吻合。图11 给出了五次测量结果相比于仿真结果的差值曲线,在±10°范围内测量误差小于1 dB,在±30°范围内测量误差小于1.5 dB。五次测量的均方根值(RMS)在±30°范围内的均值为0.4,最大值为0.8,多次测量结果相对稳定且测量误差在可接受的范围内,这说明我们提出的测量方案是可行的。
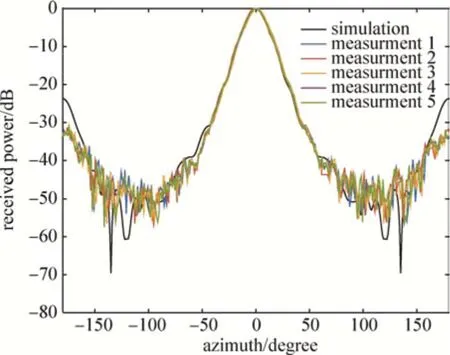
图10 测量结果与仿真结果对比Fig.10 Comparison of measurement results with simulation results

图11 误差分析Fig.11 Error analysis
测量误差主要分为无人机飞行轨迹误差、探头指向误差和探头方向图误差三个方面。无人机飞行轨迹误差来源于外界环境的干扰,如GPS 信号变弱、有风或风向突变,均会导致无人机实际飞行轨迹与理想飞行轨迹有偏差,进而导致测量误差产生,这种误差不可避免,但可通过数学计算轨迹误差,补偿方向图功率电平。无人机在执行绕飞任务时,无人机云台带动探头实时指向AUT,实时指向精度与云台电机驱动能力和负载探头的结构有关。如果云台电机驱动能力与其负载能力不匹配,会产生指向误差,可以通过更换驱动力更强的电机或加负重以配平云台力矩来解决这一问题;某些探头风阻太大,会限制云台转向性能,也会产生指向误差,解决方法是优化探头结构空气动力学设计,减小风阻。探头方向图误差是指探头挂载环境导致探头方向图产生畸变所带来的误差。减小探头误差的方法是,考虑探头挂载环境,做共型设计,使探头方向图符合测试需求。
4 结束语
基于无人机的天线测量系统可以分为远场测量方法和近场测量方法,远场测量需要无人机的飞行轨迹满足远场测量条件;近场测量方法可以直接测量接收信号的幅度和相位信息,也可以仅测量振幅,通过相位恢复技术恢复近场相位信息,最后根据近场振幅和相位信息,通过NFFFT 得到远场信息。
无人机的定位精度是影响测试精度的关键因素。现在应用于无人机测天线的主流定位系统是全站仪、激光跟踪仪和基于RTK 的GNSS 系统,还可以将两者结合使用,但是成本会变高。现在用的比较多的GNSS系统可以达到厘米级精度,激光跟踪仪和全站仪相比于GNSS 系统精度高一些,可以达到毫米级精度。但是激光跟踪仪和全站仪测量距离有限,视野有限,并且视线内不能遮挡,受天气影响较大。激光跟踪器系统通过精确跟踪安装在测量对象上的激光目标来执行空间3D 位置测量,是三者中精度最高的定位设备,价格也更高。随着激光高度表产品的优化和改进可能会克服视线遮挡问题和视野问题造成的测量限制。市场上的无人机的续航时间大约30 分钟,如果想要得到更精确的方向图,就需要更多的采样点,从而需要更长的测试时间,这就需要尽可能提高无人机的续航能力,同时也要考虑载荷问题。无人机承重有限,并且负载越重耗电也会越快,所以要尽可能减轻无人机上需要装配部件的重量。随着无人机技术和空间定位技术的快速发展,基于无人机的天线测量技术也会不断发展。
猜你喜欢
成都信息工程大学学报(2021年6期)2021-02-12
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
探索科学(学术版)(2019年5期)2019-07-13
液晶与显示(2019年5期)2019-06-11
测控技术(2018年9期)2018-11-25
中国测试(2018年10期)2018-11-17
现代装饰(2018年5期)2018-05-26
中国三峡(2017年2期)2017-06-09
制导与引信(2016年3期)2016-03-20
