一种基于北斗解调秒的锁相模型
2023-01-31 01:47罗毕锟罗毕锋
电子制作 2023年1期
罗毕锟,罗毕锋
(电子科技大学 自动化工程学院,四川成都,611731)
0 引言
高精度时间频率体系作为国家信息基础设施,是国家战略资源。世界主要发达国家都高度重视时频体系建设。时间频率关系到国家安全和关键经济领域的主权和安全,因此世界各国,特别是主要发达国家,政府投入巨资研究开发相关技术,并不断完善时间频率体系建设,以求保持领先地位。
授时体系是一个国家时频体系的基本技术支撑,为满足不同的需求,发达国家各自都建成或正在建设完善通过电话、网络、低频时码、长/短波电台和卫星等交叉互补的授时系统。先进的空—陆结合的授时体系已经成为其庞大工业、经济、军事等发展不可或缺的高科技支撑。其中,卫星授时是时间频率体系中最主要授时手段之一,其授时精度高、覆盖地域范围广、且使用方便。
而我国现有的时间频率设备大量的都是“即收即用”,无自主保持能力,或者采用“实时授时+设备内部晶振守时”,晶振存在频率准确度和老化率差、时间累计误差大的缺点,不具备长时间高精度的守时能力。
使用解调秒的晶振锁相模型是一种使用北斗卫星的解调秒的高稳定性对晶振进行调相,以达到和标准的解调秒同步的模型,可提供高准确度的10MHz频率信号输出。
1 理论模型
■ 1.1 模型整体框图
频率同步系统是使用锁相环实现的。锁相环是一种能够跟踪输入信号相位的闭环自动控制系统,广泛应用于信号处理、时钟同步、倍频、频率综合等领域。它根据输入信号和反馈信号的相位差来调整压控振荡器的输出频率,达到输入信号频率和输出信号频率相等,输入信号和输出信号保持恒定的相位差,从而达到锁定的目的。
其中,时间间隔测量负责比较本秒和参考秒的相位差;卡尔曼滤波器能够很好地控制环路相位校正的速度和精度;压控振荡器给出一个10M信号,一部份作为输出,另一部分通过分频产生本地PPS信号与参考秒进行相位比较。
当本秒与参考秒相位保持一个恒定的差值,输入信号频率和输出信号频率趋于相等,从而达到频率锁定的目的。

图1 频率同步原理框图
■ 1.2 相差跟踪模型
本模型利用北斗的解调秒信号具有长期稳定的特性作为参考标准,比对出与10MHz晶振分频秒的相位误差Δt(单位:s),采用Kalman滤波控制算法对Δt进行平滑滤波,利用准确度Δf/f=Δt/τ(τ是取样间隔,这里τ=1)计算出OCXO的准确度,最后通过微调OCXO的压控电压实现频率锁定。
北斗卫星的授时秒信号的特性曲线如图,可以看出卫星授时信号的长期特性是稳定的,可以用于OCXO的频率校准。但是卫星授时信号的短期抖动性极大,约有5E-8量级。因此需要对北斗卫星的解调秒进行滤波后使用。
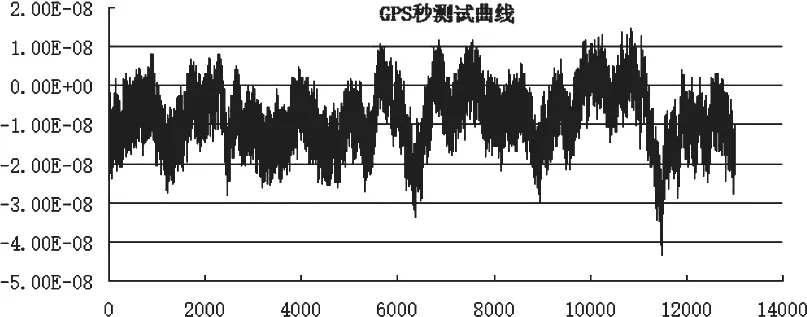
图2 卫星解调秒信号的特性曲线
1.2.1 Kalman 滤波器原理
要利用卫星授时信号对OCXO快速校准必须进行滤波处理减小短期抖动。在本模型中,采用卡尔曼滤波算法。
Kalman滤波器是一种基于最小均方误差准则的最优线性时域滤波,采用状态空间的方法描述系统,算法采用递推形式,无净差。滤波算法不需要过去的全部观测数据,仅仅根据前一次的估算值的最近一个观测数据来估计当前值。
Kalman滤波算法的系统状态描述方程:

式(1)中X为系统状态,A和B为状态转移矩阵,k为时间系数,U为系统的已知输入,W为过程噪声向量。

式(2)中Z是系统测试值,V是测量噪声,H是线性连接矩阵。
图3是Kalman滤波算法的基本步骤,P是系统状态,X是对应的协方差,R为测量噪声的协方差,Q为过程噪声的协方差。
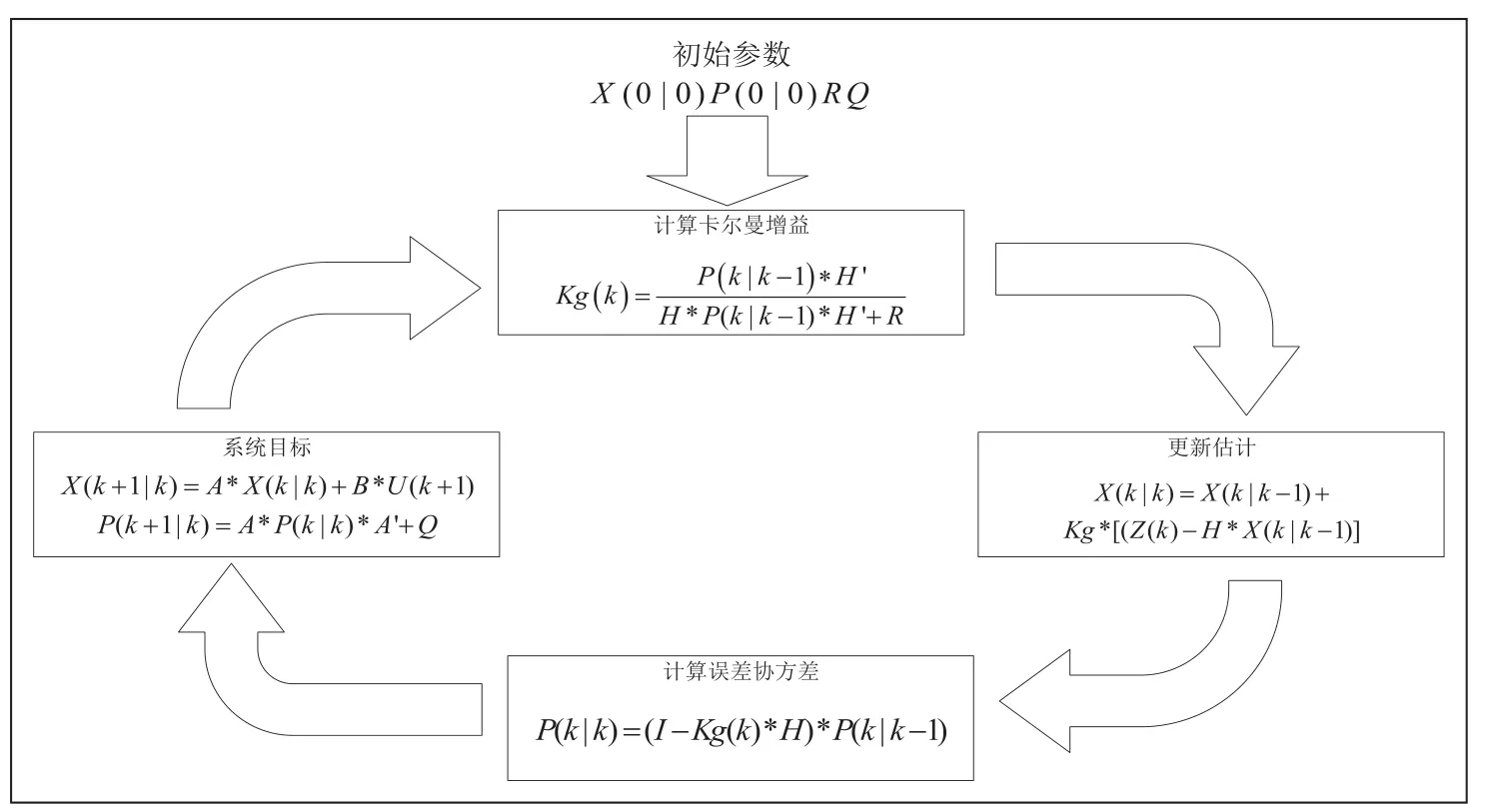
图3 Kalman滤波器算法工作图
1.2.2 Kalman 滤波器模型
本模型通过实时比对参考秒与60MHz信号的相位差,利用Kalman滤波算法输出频率控制量修正OCXO的频偏。
OCXO的相位输出模型为:

其中a是初始相位,b是频率偏差,c是频率漂移,∆ξ1(t)是晶振的相位噪声,∆ξ2(t)是测量噪声。
在此相位模型下有三个状态参数,分别是相位、频率以及频漂,我们在Kalman滤波器中包括这三个参数,则系统的状态方程为:

其中x1、x2及x3分别是相位、频率和频漂,输入的测量值是参考秒与OCXO之间的相位,故测量矩阵为:

状态方程可以表示为如下形式:

A是系统的状态转移矩阵,A
设定相位x1,频率x2及频漂x3的Kalman过程噪声为及分别是相位白噪声、频率白噪声和频率游走噪声的方差,此时测量噪声协方差对于采用1pps信号测量而言,测试时间τ=1。
系统过程噪声协方差矩阵此时可表示为:
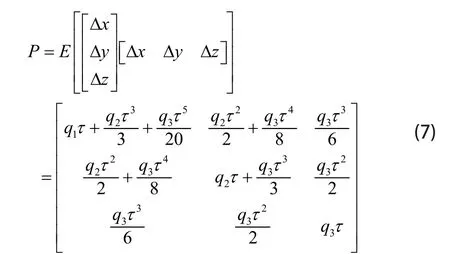
σ1、σ2及σ3的取值如下:
式中hα是表征各种噪声强弱的常数,α对应不同的噪声类型(α=2对应白调相噪声,α=0对应白调频噪声,α=-2对应随机游动调频噪声)。
■1.3 PID控制模型

图4 PID原理框图
常见的数字PID控制方法有位置式和增量式,位置式PID算法每次输出与整个过去状态有关,计算式中要用到过去偏差的累加值,容易产生较大的累积误差;而增量式PID只需计算增量,当存在计算误差或精度不足时,对控制量计算的影响较小。
本模型采用了增量型PID控制算法,该算法数学模型如下:

∆y(n)为n时刻输出电压的步进值,为比例增益,δ为比例带,为积分系数,T为控制时间,TI为积分时间,称为微分系数,TD为微分时间。
在本模型中,由于每次调节后OCXO都需要一定的时间使其输出频率稳定下来,即对它的控制具有较大的滞后性,并且由于对输出频率的调节精度和相位噪声指标要求较高,所以每次频率的拉动幅度不宜过大,并且拉动周期相应要长,即KP和KI不能过大,而KD可以相应的增大。
2 MATLAB仿真及实物验证
■2.1 Kalman滤波器模型MATLAB仿真
我们利用MATLAB对上面的Kalman滤波器模型进行仿真,结果如图5所示。

图5 Kalman滤波器模型仿真结果
图5中,上下较突出部分是原始数据,另一条是Kalman滤波器给出的预测值,可以明显的看出经过Kalman滤波器后,数据相位抖动明显减小,从仿真的结果看,前述模型能很好的满足解调秒信号对晶振锁相的需求。
■2.2 增量式PID控制模型MATLAB仿真
我们继续利用MATLAB对PID控制模型进行仿真,结果如图6所示。

图6 增量式PID控制模型仿真结果
我们可以清楚的从仿真图像上看出,通过该种增量式PID控制模型,系统对输出的信号有非常明显的收敛效果,可以清晰的发现输出信号与标准时间的相位差可以快速的拉近并保持。
■ 2.3 实物验证
我们将上述设计进行了实物生产与实际测试。在晶振锁相过程中我们对其频率准确度进行测量,锁定曲线如图7所示。

图7 锁定过程
晶振在进行充分预热后,在经过20min的频率锁相时间后,本秒与参考秒的同步精度控制在100ns以内,进入锁定状态,准确度优于2E-10量级,如图8所示。

图8 晶振锁相20min后的频率准确度
经过24小时锁相后的频率平均准确度可以达到5 67E-14,如图9所示。
3 结语
本文提出了一种利用Kalman滤波器对晶振输出信号相位与北斗解调秒相位差进行处理后,使用增量式PID控制,对晶振的压控端进行调节,从而实现对晶振的信号锁相,提高晶振输出信号的准确度的模型。该模型在MATLAB和实际实验中均能使晶振在锁相24小时后达到6E-14量级的频率准确度指标,可以满足无线基站、通信设备、时间基准、导航系统等无人值守环境下的晶振使用需求。
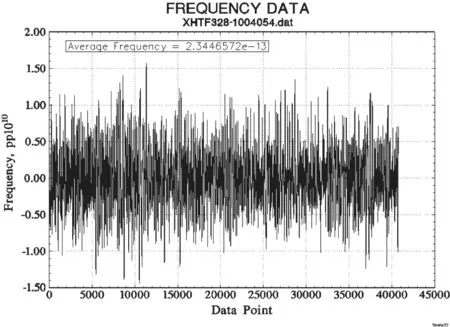
图9 晶振锁相24小时后的频率准确度
猜你喜欢
辽宁科技学院学报(2021年3期)2021-07-01
时间频率学报(2021年1期)2021-04-26
建筑科技(2018年6期)2018-08-30
通信电源技术(2018年5期)2018-08-23
电子技术与软件工程(2017年14期)2017-09-08
中国交通信息化(2016年5期)2016-06-06
电测与仪表(2016年6期)2016-04-11
电测与仪表(2016年18期)2016-04-11
空间控制技术与应用(2015年3期)2015-06-05
遥测遥控(2015年2期)2015-04-23