基于动态阻抗匹配的单传感器MPPT算法研究
2023-01-31 01:47蒋平伍青徐自强
电子制作 2023年1期
蒋平,伍青,徐自强
(1.成都客车股份有限公司,四川成都,611731; 2.电子科技大学,四川成都,611731)
0 引言
由能源使用而带来的环境污染问题日益严重,寻找新能源已经迫在眉睫。其中,太阳能以清洁,丰富获得人们的青睐。但是,太阳能发电容易受到光照、温度、负载等外界条件的影响,且转化效率较低[1]。所以提高光伏电池的输出功率,就可以在一定程度上优化光伏系统,增大经济效益[2]。
现在比较常用的算法有开路电压法和短路电流法[3],该算法实现简单,跟踪速度也很快。但是该算法只能在特定的外界条件下使用,一旦环境出现变化该算法就会出现误判,造成能源的浪费;扰动观察法[4]是通过调整输出电压然后比较输出功率来调整占空比的,控制方法相对简单,但是稳定性较差;电导增量法[5]是通过计算光伏电池输出功率对电压求导的值来调整系统的输出电压,容易发生误判。另外还有模糊控制[6]、变步长电导增量法[7]等新型的方法。这些方法在跟踪速度和精度上都有很大的改进,但是大部分需要将光伏电池的输出电压和电流作为反馈量,而且控制方法较为复杂,使得一些算法的实用性较低。
为了使系统和算法更加简单,跟踪速度和精度更加完美。本文从减少反馈量入手,提出了一种基于动态阻抗匹配的单传感器的简单MPPT算法,最后在MATLAB/Simulink仿真平台上验证了其可行性。
1 光伏电池等效模型
光伏电池是由半导体构成的,可以吸收太阳能然后转化为电能[8]。可以用一个电流源和一个二极管的并联[9]来等效它的数学模型。其数学模型如图1所示。

图1 光伏电池等效模型
光伏电池的输出方程为:
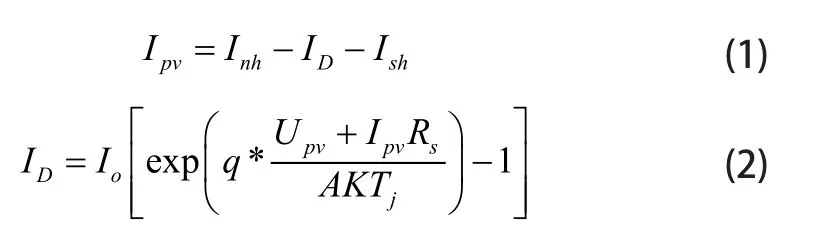
式中:Ipv是对外输出电流;Io是二极管D的反向饱和电流;q是电子的电荷;K是波尔兹曼常数;A是D的理想因子;Tj是光伏电池的结温;Upv是对外输出电压[10]。
对图1的模型在一定的光照条件下进行SIMULINK仿真,得到图2所示的光伏电池输出U-P曲线。

图2 U-P曲线
由图2可以看出光伏电池的输出功率有一个最大点。所以找到这个最大点便可以提高光伏系统的输出功率。
2 基于动态阻抗匹配的单传感器MPPT算法
■2.1 单传感器MPPT的算法原理
根据戴维南定理,用一个电压源E与一个内阻r的串联来等效光伏阵列,当且仅当等效输入负载R等于内阻r时[2],电路输出最大功率达到最大。由于内阻r是非线性的,将其定义为r=dUr/dIPV,Ur是内阻r上的电压。光伏电池的输出电压UPV=E−Ur,从而可以推出r= −dUPV/dIPV。
本文采用典型的BOOST电路来进行占空比调节,对于BOOST电路输入电压Upv与输出电压Uo之间的关 系 为UO=UPV/(1 −D)。D为 占 空 比, 假 设BOOST电路损耗为零,根据能量守恒可以推出等效输入负载R=UPV/IPV= ( 1 −D)2RL,即可以推出光伏电池的输出电压Upv如公式(3)。

将占空比D看成电流Ipv的函数,公式两边同时对电流Ipv求导并整理,可得如下公式:
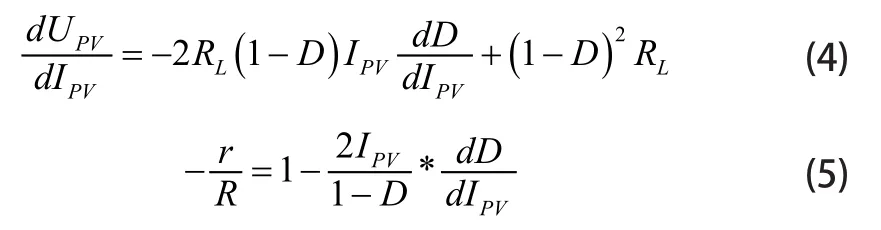
由图2可以看出光伏电池的输出功率有且只有一个最大点,所以公式(5)中一定存在一点使得内阻r与等效阻抗R相等,而该点就是最大功率点。所以可以由公式(5)得出在最大功率点时满足dD/dIPV= ( 1 −D) /IPV。
(1)当dD/dIPV< ( 1 −D) /IPV时,推出内阻r小于等效电阻R,这时就增加占空比减小等效电阻R。
(2)当dD/dIPV> ( 1 −D) /IPV时,推出内阻r大于等效电阻R,这时就减小占空比增加等效电阻R。
所以该算法通过实时采样光伏电流Ipv,然后通过不断调整BOOST电路的占空比来实现光伏电池的内阻r与等效电阻R相等,从而实现光伏电池的最大功率追踪。
■2.2 基于二分法的MPPT算法实现
采用二分法同时调节占空比和步长的大小,可以提高系统的追踪速度和稳定精度。整个算法的具体步骤如下:
(1)先初始化占空比d0和步长a0,以及对输出电流IPV进行采样。先判断环境是否发生突变,如果环境发生突变了就重新初始化占空比d0和步长a0,否则就进行步骤2的运算。
(2)判断dIPV是否为零,如果dIPV等于零则占空比dk+1不做变化,步长ak+1等于零;如果dIPV不等于零,则进行步骤3的运算。
(3)判断dD/dIPV与 (1 −D) /IPV是否相等,如果相等则占空比不做任何改变,如果不相等就进一步判断连续两次的步长是否同号。如果ak与ak-1异号,则说明步长已经跨过最大点功率所对应的步长,就取dk+1=(dk+dk-1)/2,为了减少波动步长也采用二分法即取ak+1=-ak/2。如果ak与ak-1同号就进行步骤4的运算。
(4)比 较dD/dIPV与与(1 −D) /IPV的 大 小, 如 果dD/dIPV< ( 1 −D) /IPV则 加大占空比,反之就减小占空比。
(5)重复以上步骤。
具体控制流程如图3所示。图3中d0为初始占空比,a0为初始占空比变化步长。

图3 新型MPPT流程图
3 仿真结果与分析
在MATLAB/Simulink仿真平台上,搭建基于BOOST电路的光伏系统仿真模型,如图4所示。
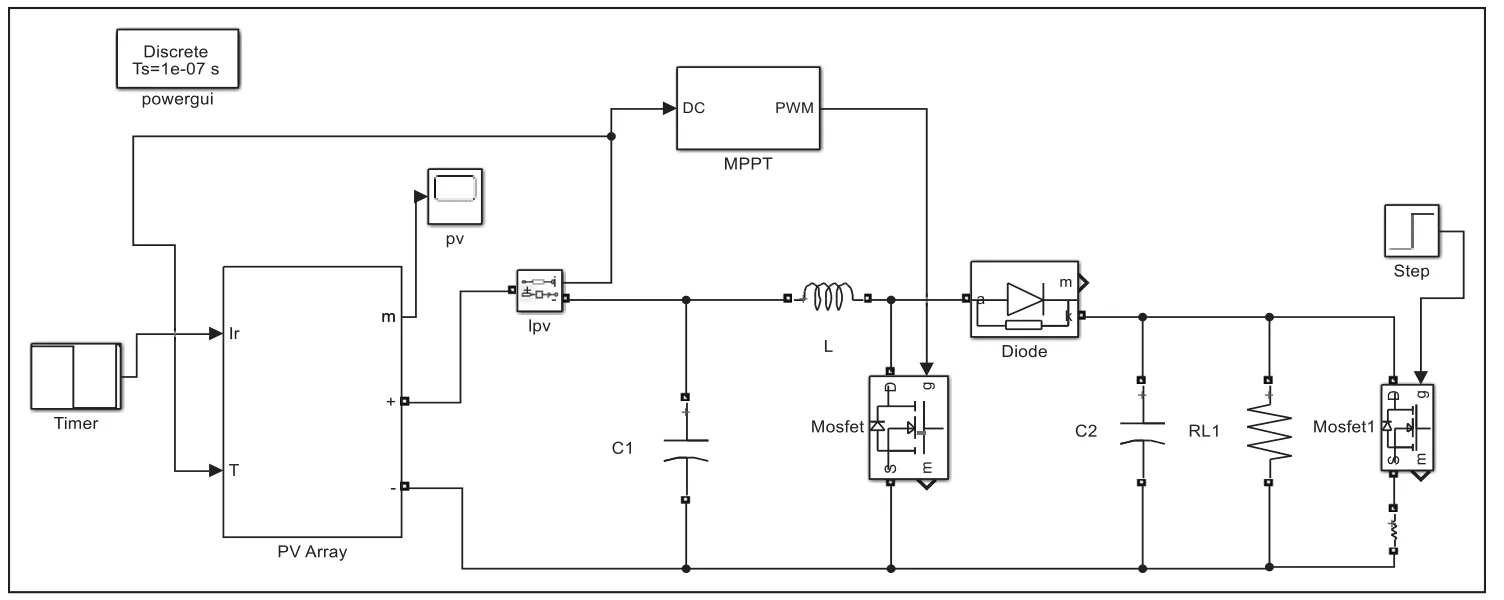
图4 光伏系统仿真模型
图4中设定仿真参数为:电路为Boost直流电路,电感值L为360μH,C1、C2均为1000μF;光伏电池的短路电流为7A,开路电压24V,UPmax为20 16V,IPmax为6 3A。设立仿真条件为:0s时太阳光强度由0W/m2突变为1000 W/m2;0 2s时太阳光照强度由1000 W/m2突变为700 W/m2;0 3s时太阳光照强度由700 W/m2突变为1000 W/m2;0 4s时负载由20Ω突变为6 67Ω。在该仿真条件下对比了定步长d=0 01的电导增量法、新的不对称变步长的电导增量法以及基于动态阻抗匹配的单传感器MPPT算法。
对不同的算法进行仿真,得到的光伏组件输出功率的仿真结果如图5~图7所示。

图5 d=0 01的定步长电导增量法
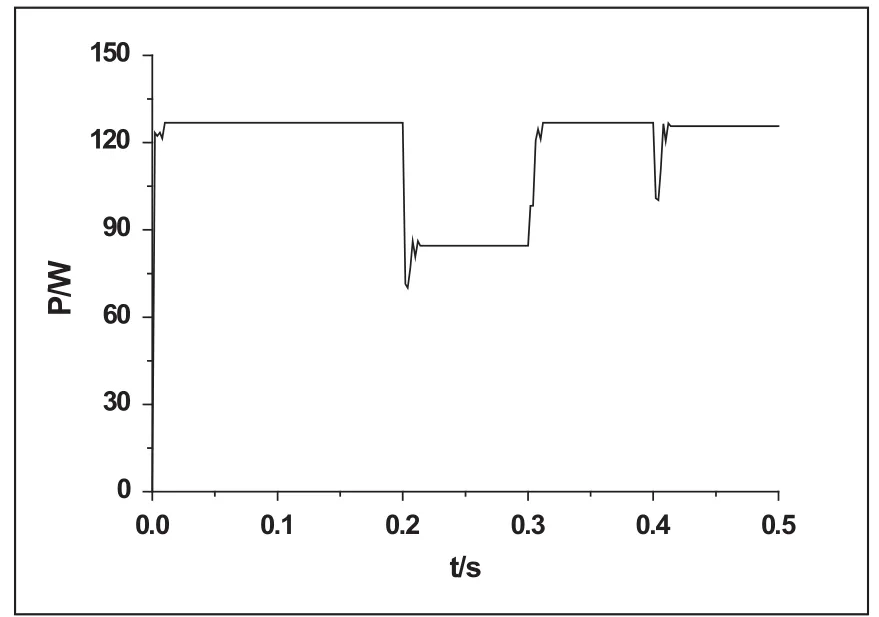
图7 基于动态阻抗匹配的单传感器MPPT算法
从图5和图7中可以看出,定步长电导增量法和新型MPPT算法在负载发生变化时都能重新追踪到最大功率点,但是后者在最大功率的波动明显小于前者;对比图6与图7,不对称变步长电导增量法与新型MPPT算法在最大功率点的波动较小,但是当负载发生变化时,不对称变步长电导增量法不能重新跟踪到最大功率点。

图6 不对称变步长电导增量法
为了更清楚的对比新型算法的优点,将具体的仿真结果数据制成表1。其中t代表仿真环境变化时跟踪到MPP点的时间;Pmax代表环境稳定时的最大功率。从表1的仿真数据可知,当光照强度或者负载发生变化时新型MPPT算法的追踪速度可以达到8ms远远快于另外两种算法。而且新型MPPT算法不论在哪种仿真环境下所追踪到的最大功率都比相同环境下的定步长电导增量法和不对称变步长电导增量法大,所以新型MPPT算法的效率更高。从流程图3还可以看出,新型MPPT算法的占空比和步长都利用二分法来不断进行调整。不仅控制方法简单,对不同光伏系统的适用性也较强。

表1 仿真结果数据
4 总结
本文提出了基于动态阻抗匹配的单传感器MPPT算法,与传统的定步长电导增量法和新型的不对称变步长电导增量法进行对比,该算法具有如下优势:
(1)基于动态阻抗匹配的单传感器MPPT算法只需要将输出电流作为反馈量,可以减少由电压反馈带来的检测误差,提高系统精度。尤其是在硬件方面可以减少电压传感器的使用,即节约硬件成本又减少硬件体积。
(2)基于动态阻抗匹配的单传感器MPPT算法采用二分法同时来改变占空比和步长,二分法来改变占空比可以提高系统的动态性能,快速的追踪到MPP。二分法用于步长的改变,理论上可以无限减少稳态误差,减少再MPP点的波动。算法简单,对不同光伏系统的适用性较强。
(3)基于动态阻抗匹配的单传感器MPPT算法在跟踪速度和在最大功率点的稳定性上都优于传统算法,尤其是在负载突变时也能较快并准确的跟踪到最大点。
猜你喜欢
计算技术与自动化(2022年2期)2022-07-04
中学生数理化(高中版.高考理化)(2021年3期)2021-05-21
空间电子技术(2020年2期)2020-06-04
云南教育·中学教师(2019年10期)2019-08-13
西安电子科技大学学报(2018年5期)2018-10-11
电子制作(2018年14期)2018-08-21
中学生数理化·七年级数学人教版(2018年3期)2018-05-30
科技创新导报(2016年8期)2016-10-21
电测与仪表(2016年20期)2016-04-11
西南医科大学学报(2016年4期)2016-01-03