一种秋刀鱼的导向装置的设计与参数优化
2023-02-03 08:51陈成明余世龙朱清澄花传祥上官春霞
制造业自动化 2023年1期
陈成明,余世龙,朱清澄,花传祥,,上官春霞
(1.上海海洋大学 工程学院,上海 201306;2.上海海洋大学 海洋科学学院,上海 201306)
0 引言
秋刀鱼是远洋渔业重要的捕捞对象之一,近五年其总捕获量在35万~60万吨[1]。但与国外相比,国内秋刀鱼的加工技术较落后,存在着基础研究薄弱,生产效率较低等问题[2]。前处理加工技术是鱼类加工技术的首要和关键环节,主要包括:导向、分级、去鳞去内脏等关键步骤[3]。其中分级、去鳞去内脏等技术发展迅速[4~7]。但在秋刀鱼进行分级、去鳞去内脏之前,必须对秋刀鱼进行导向处理,即将姿势各异的秋刀鱼按照一定的规律调整,然后逐条进入加工设备。国外的相关学者和企业研究较多的是与一些鱼类加工生产线相匹配的导向装置。Badder公司制造的481型自动加料机[8],结合鱼的背部与腹部在外力的挤压下变形差异的特征,在驱动压轮与压板的挤压下进行导向处理;Marel公司[9]设计了一种鱼体腹背导向分拣生产线,其中利用鱼体头部刚度较大这一特性,腹背导向机构和翻转机构共同作用实现鱼体腹背导向;Pegoraro等[10]设计了一种传感器与机械结构相结合的鱼体导向装置,利用传感器检测鱼体姿势,配合机械机构,实现鱼体导向功能;Knyszewki等[11]通过高低振动平台与有倾斜角度的渐缩通道的配合,将细棘长吻鱼鱼体进行导向处理。目前我国的分离导向装置发展相对较缓慢。鲁力等人[12]利用鱼的重心特点及顺鳞摩擦角之间的关系,设计了振动台对鱼进行姿势调整并进行排序;徐颂波等人[13]根据鱼头鱼尾之间的刚度不同,利用在同一压力下产生不同的弯曲形变,进而对鱼体进行导向;万鹏等人[14]以利用鱼体腹背受力挤压的特性以及鱼体近似为楔形的腹部横截面结构特点,提出了一种鱼体的导向方法;高星星等人[15,16]探讨了振动平台结构及振动工艺参数对鱼体定向的影响,为鱼体振动定向装置的研发提供理论依据。综上,国外研究的分离导向设备主要针对海水鱼,但由于每一种海水鱼的体型差异较大,目前国外研究没有适合于秋刀鱼的分离导向设备;国内研究的分离导向设备主要基于淡水鱼结构特征,例如鲫鱼的腹部横截面近似为楔形、鱼头鱼尾具有不同的刚度等,进而利用振动原理和有倾角的渐变滑道,对淡水鱼进行分离导向。但国内的设备在分离导向时过多依赖于重力和倾斜角度,极易堵塞。因此有必要设计一种适合秋刀鱼的导向方法与设备。
为了解决秋刀鱼导向困难的难题,本文以秋刀鱼为研究对象,基于双导向轮的力学特性下,根据秋刀鱼的物理结构特性,设计并试验了一种适合于秋刀鱼导向的装置。以鱼体损伤量和总时间作为评价指标,进行了单因素试验和3因素5水平的正交实验。最终确定装置的最优工作参数,并进行最优参数样机试验,最终确定最优工作参数。为秋刀鱼分离导向装置研发提供理论依据和技术参考。
1 装置整体结构与工作原理
1.1 装置整体结构
秋刀鱼导向装置主要是由分离机构、导向机构、限位组件、机架、电机、输送带等部件组成。分离机构主要包括分离漏斗、电磁振动器、滑筒;导向机构主要包括带轮电动机、皮带、皮带支架。装置整体结构如图1所示。

图1 秋刀鱼导向装置示意图
1.2 工作原理
工作时,该装置通过工人将一定数目的秋刀鱼倒入分离漏斗中,为了提高分离漏斗的效率,设计了双漏嘴型漏斗。在电磁振动器作用下,秋刀鱼从每个分离漏斗的底部逐条漏出,通过滑筒滑到输送带上,在限位组件的作用下,秋刀鱼垂直地输送到导向装置处,导向装置通过两个带轮电动机的带动两边的皮带进行差速转动,通过两皮带对秋刀鱼的摩擦力的不同,对秋刀鱼进行导向作用。底板与机架之间有橡胶垫,橡胶垫有吸收振动的功效。
2 关键部件设计
2.1 秋刀鱼的基本参数
秋刀鱼的结构特征是设计分离导向装置的重要参考之一。经统计分析,秋刀鱼体长范围是250±50mm,体宽范围是40±10mm,平均重量在100~300g,截面图呈椭圆形。
2.2 分离机构
分离机构是设计导向装置的首要环节。如图2所示,双漏嘴型漏斗的两个漏腔分界处的高度h必须大于或等于一条秋刀鱼的长度,以便尽量减少振动过程中,在左右腔中的秋刀鱼相互干扰,此处设计h为300mm;对于漏斗的倾斜角α,能保证秋刀鱼不堵塞即可,设置为75°;对于漏嘴的直径d,结合秋刀鱼的体宽40±10mm,设置漏嘴的d直径为40mm,此每个漏嘴的大小只能使一条秋刀鱼通过;导向装置的总高度,根据人因工程学的相关知识,在重体力工作时,男性的工作面的高度750~900mm,女性的工作面的高度700~850mm,考虑到男女性的综合条件,确定为830mm[17,18]。
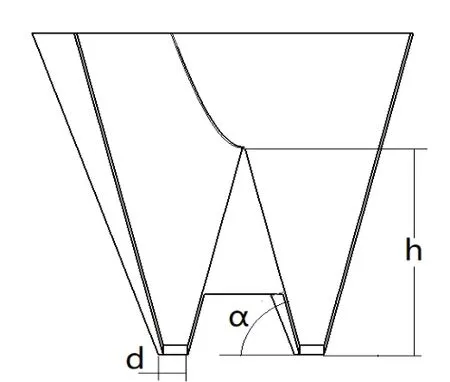
图2 双漏嘴型漏斗半剖图
2.3 导向机构
导向机构是导向装置的关键部件。如图3所示,带轮电动机5通过皮带轮6带动皮带4转动,皮带4与皮带支架3上的滚轮7接触,秋刀鱼通过接触皮带4,进行导向作用。导向机构要想工作在最佳状态,工作参数要恰当。该机构的工作参数包括:左右两个带轮电动机的转速、转速比、两导向轮之间的距离。通过三个因素的配合,能使导向效率最好。

图3 导向机构示意图
2.3.1 导向机构的原理
导向机构的原理是基于秋刀鱼的不同部位上的摩擦系数的不同,通过摩擦力对不同的秋刀鱼进行导向作用。导向机构中的皮带表面粗糙,起主要导向作用。产生摩擦的主要部位有皮带表面与秋刀鱼的头部表面接触处、皮带表面与秋刀鱼的鱼体中部表面接触处、皮带表面与秋刀鱼的鱼体尾部表面接触处、秋刀鱼头部表面与头部表面接触处、秋刀鱼头部表面与中部表面接触处。由于皮带表面粗糙、秋刀鱼的头部较坚硬、秋刀鱼的鱼体布满鱼鳞,较粗糙,所以各部分的摩擦系数关系有如下关系:

其中,
f1是皮带表面与秋刀鱼的鱼体中部表面摩擦系数;
f2是皮带表面与秋刀鱼的鱼体尾部表面摩擦系数;
f3是皮带表面与秋刀鱼鱼体头部表面摩擦系数;
f4是秋刀鱼头部表面与中部表面的摩擦系数;
f5是秋刀鱼头部表面与头部表面的摩擦系数。
由于分离机构是双漏斗型漏斗,出现在输送带上的两条秋刀鱼可能出现同一时刻进入导向装置。此导向机构可以使每个秋刀鱼逐一通过,且保证不能使两个秋刀鱼同时通过。由于两导向轮的转速不相等(这里假设w1>w2),所以分为三种情况:头部与头部接触情况,如图4(a)所示;头部与中部接触情况,如图4(b)所示;头部与尾部接触情况,如图4(c)所示。对于头部与中部接触情况,通过区分已经进入导向装置的秋刀鱼是否靠近高转速导向轮,分为两种情况:已经进入导向装置的秋刀鱼靠近低转速轮,如图4(b)所示;已经进入导向装置的秋刀鱼靠近高转速轮,如图5(b)所示。
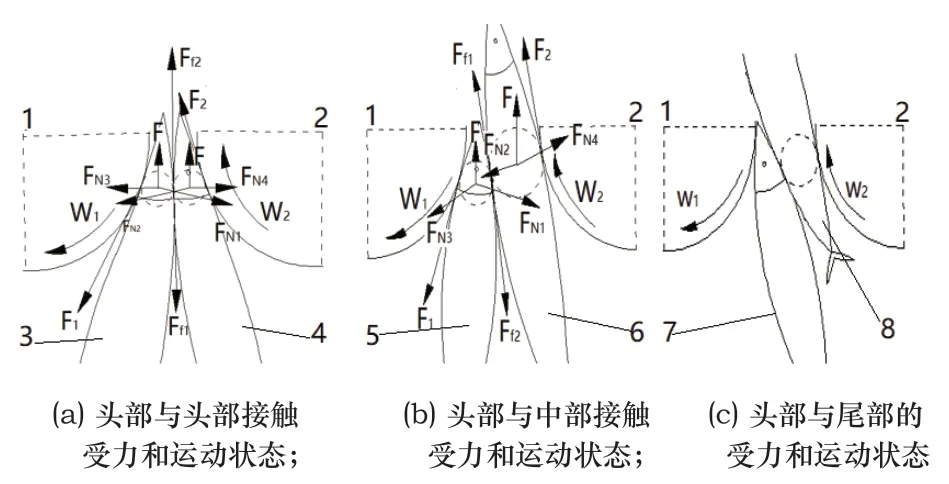
图4 与转速小的导向轮接触的秋刀鱼先导向图

图5 与转速大的导向轮接触的秋刀鱼先导向图
图4、图5中,1是转速大的导向轮,2是转速小的导向轮3、4、5、6、7、8、9、10是秋刀鱼,秋刀鱼与导向轮的接触点与秋刀鱼与秋刀鱼的接触点之间的线段作直径画圆,其圆心是转动时的大致质心位置。r3、r4、r5、r10为秋刀鱼的头部接触时圆的半径,r6、r9为秋刀鱼的中部接触时圆的半径,w1是导向轮转速,w2是导向轮转速,F1是导向轮1对秋刀鱼的摩擦力,F2是导向轮2对秋刀鱼的摩擦力,F是输送带对秋刀鱼的摩擦力,FN1是导向轮对秋刀鱼4的支持力,FN2是导向轮对秋刀鱼3的支持力,FN3是秋刀鱼3对秋刀鱼4的支持力,FN4是秋刀鱼4对秋刀鱼3的支持力,在图4(a)中,Ff2是秋刀鱼4对秋刀鱼3的摩擦力,Ff1是秋刀鱼3对秋刀鱼4的摩擦力,其他图以此类推。
本文假设导向机构工作状态理想,通过分析秋刀鱼在导向机构中的受力情况和运动状态来阐述导向过程[19]。
当头部与头部先接触时进行导入机构时,两端皮带分别于秋刀鱼的头部接触且一条秋刀鱼的头部与另一条秋刀鱼的头部接触,如图4(a)所示。秋刀鱼3、秋刀鱼4都有逆时钟转动的趋势。秋刀鱼3的转矩M3和秋刀鱼4的转矩M4分别为:

此时转矩M3、M4均大于零,所以秋刀鱼3、秋刀鱼4均逆时针转动。在两导向轮的带动下,与转速高的导向轮接触的秋刀鱼3先进行导向,接着秋刀鱼4进行导向。
当一条秋刀鱼的中部与头部进入导向机构时且已经进入导向机构的秋刀鱼靠近低转速轮。两端皮带分别于秋刀鱼的头部和中部接触且两条秋刀鱼的中部与头部接触,如图4(b)所示。秋刀鱼5、秋刀鱼6有逆时钟转动的趋势。秋刀鱼5的转矩M5和秋刀鱼6的转矩M6分别为:

由上公式得,M5、M6均大于零,秋刀鱼5、秋刀鱼6有逆时钟转动的趋势。综上述所,秋刀鱼6先进行导向,接着秋刀鱼5再进行导向。
当一条秋刀鱼的中部与头部进入导向机构时且已经进入导向机构的秋刀鱼靠近高转速轮。两端皮带分别于秋刀鱼的头部和中部接触且两条秋刀鱼的中部与头部接触,如图5(b)所示。秋刀鱼9、秋刀鱼10有顺时钟转动的趋势。秋刀鱼9的转矩M9和秋刀鱼10的转矩M10分别为:

由于f1>f3>f4,有F2>Ff2且有F1>Ff1,此时转矩M9、M10均大于零,秋刀鱼9、秋刀鱼10有顺时钟转动的趋势。在两导向轮的带动下,秋刀鱼9先进行导向,接着秋刀鱼10进行导向。
当一条秋刀鱼的尾部与头部进入导向装置时,如图4(c)所示。由于f1=f2,此种情况秋刀鱼7、秋刀鱼8所受力和转矩情况分别于图4(b)所示秋刀鱼5、秋刀鱼6相同。秋刀鱼7、秋刀鱼8均逆时针转动的趋势且秋刀鱼8前进的动力主要是输送带的摩擦力,导向装置不会发生堵塞。同理,图5(c)所示的情况也不会堵塞。
综上所述,当导向装置工作在理想状况下,无论是哪种情况,两条秋刀鱼都不会在导向装置的位置处发生堵塞。
通过分析发现,导向轮的速度对导向装置的影响最大。当转速较大时,导向轮对秋刀鱼的摩擦力F1越大,秋刀鱼在导向时出现打滑现象装置,若转速继续增加,秋刀鱼会被甩出装置;当速度过小时,导向时间过长,容易产生堵塞。两导向轮的转速比也对导向效果有影响,当转速比过大时,秋刀鱼与输送带接触不充分,秋刀鱼会出现摇摆现象;当速度比过小时,导向效果不明显,导向时间长。两导向轮之间的间距主要影响受力圆半径的大小,从而影响到转矩的力臂,然而当间距过大时,不能达到秋刀鱼逐一通过的效果。综上所述,确定导向机构的最佳参数,有利于达到最佳的导向效果。
2.3.2 基于预实验确定主要参数范围
影响导向机构的主要参数有:导向轮的转速、导向轮的转速比、导向轮间距,以总时间和鱼体损伤量为指标,进行预实验。根据预实验发现,当由于转速超过85 r⋅min-1,秋刀鱼出现打滑和失去稳定性现象,导向总时间增加,鱼体损伤量随着转速的增加而逐渐增加。当转速低于45r⋅min-1时,秋刀鱼不进行导向,产生堵塞现象,所以转速的范围能确定为45r⋅min-1~85r⋅min-1;当两导向轮之间的间距大于57mm时秋刀鱼不能达到逐一通过的效果,同时当间距小于45mm时,秋刀鱼易产生堵塞,即间距的范围为45mm~57mm;当转速比低于1.3时,导向效果不明显,当转速比大于2.5时,秋刀鱼易发生剧烈抖动,失去稳定性。即转速比的范围为1.3~2.5。
3 单因素试验
3.1 试验对象
随机选取100条秋刀鱼进行试验。其选中的秋刀鱼体长范围:250±50mm,体宽范围:40±10mm,重量范围在100g~300g。
3.2 试验方法
以导向轮转速、两导向轮转速比、导向轮间距等为自变量,以秋刀鱼单体输送效果(总时间、鱼体损伤量)为评价指标,控制变量法进行试验,试验方案如下:
1)将间距等分成45mm,48mm,51mm,54mm,57mm五组,转速设置为60r⋅min-1,转速比设置为1.8,进行试验,记录总时间和鱼体损伤量;
2)将转速比等分成1.3,1.6,1.9,2.2,2.5五组,间距设置为50mm,转速设置为60r⋅min-1,记录总时间和鱼体损伤量;
3)将转速等分成45r⋅min-1,55r⋅min-1,65r⋅min-1,75r⋅min-1,85r⋅min-1五组,间距设置为50mm,转速比设置为1.8,进行试验,记录总时间和鱼体损伤量。
分别进行三组试验,探究各因素对单体输送效果的影响。
3.3 实验结果
通过excel对数据进行统计,得到间距、转速比、转速对单体输送效果的影响趋势图。
如图6所示,不同间距对单体输送效果有影响。随着间距地增大,总时间逐渐减少,在间距为51mm处总时间达到最小值234s,此时鱼体损伤量为6条。随着间距继续增大,总时间值处于稳定状态,鱼体损伤量随着间距的增加,鱼体损伤量逐渐减少,最后趋向于稳定状态。

图6 间距对单体输送效果的关系图
如图7所示,不同转速比对单体输送效果有影响。随着转速比地增大,总时间逐渐减少,在转速比为1.9处,总时间达到最小值238s,此时鱼体损伤量为13条。随着转速比继续增大,秋刀鱼失去稳定性现象,总时间增加较快;鱼体损伤量随着转速比增加而增加。

图7 转速比对单体输送效果的关系图
如图8所示,不同转速对单体输送效果有影响。随着转速地增加,总时间逐渐减少,在65r⋅min-1达到最小值,此时的总时间为238s,鱼体损伤量为7条。转速继续增加后,导致秋刀鱼出现打滑和失去稳定性现象,总时间增加,鱼体损伤量增加。

图8 转速比对单体输送效果的关系图
4 正交试验
利用design expert8.1对实验数据二次通用旋转组合实验设计和进行显著性分析[22,23]。以不同转速,不同间距,不同转速比作为自变量,以单体输送效果作为评价指标,实际3因素5水平的正交实验。观察各自变量及交互作用对评价指标的影响,并确定最佳匹配参数,编码如表1所示。

表1 编码水平表
通过design expert的设计,共有产生17组试验,每组试验随机选取100条秋刀鱼,记录每组试验的单体输送效果,如表2所示,得到正交试验结果,如表3所示。
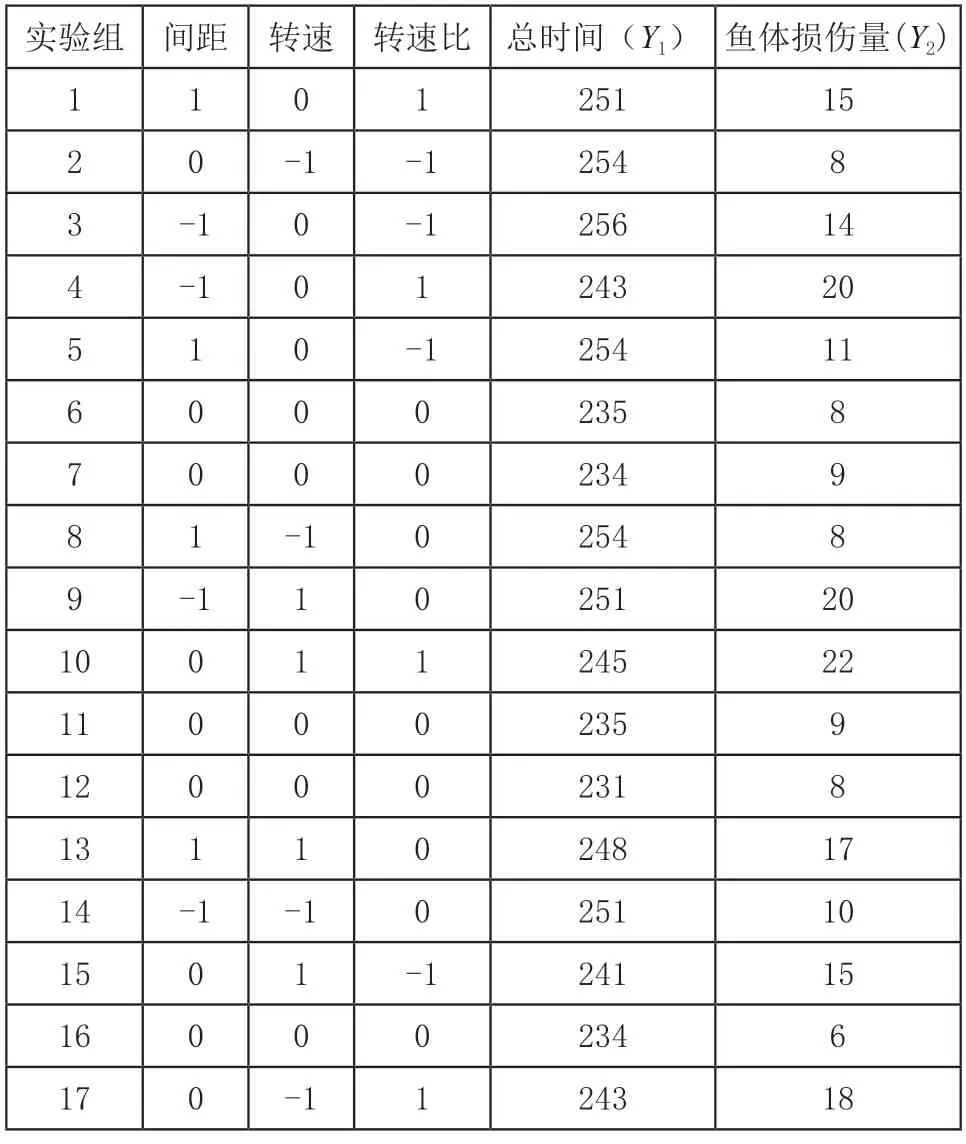
表2 正交试验设计与数据表
4.1 回归分析
通过对数据的响应面回归分析,最终可得到总时间和鱼体损伤量方差分析表(表3)并得到总时间Y1,鱼体损伤量Y2与间距A,转速比B,转速C的回归方程为:
其中Y1回归模型的P<0.01,有极显著性,失拟项F=0.2316>0.05,无显著性,模型决定因数R2=0.9750;其中Y2回归模型的P<0.01,有极显著性,失拟项F=0.1346>0.05,无显著性,模型决定因数R2=0.9497。综上所述,转速、转速比、间距对总时间和鱼体损伤量的影响都达到极显著水平(P<0.01),但失拟项不显著(F>0.05),表面一定范围内回归模型与实际情况拟合度较高。
由于皮带是橡胶材料,导向时与秋刀鱼接触对秋刀鱼的损伤程度较小,对后续秋刀鱼的加工不影响。即将总时间作为衡量导向装置的主要影响因素。根据正交实验结果(表3),影响秋刀鱼导向总时间的主次顺序是:C(转速)>B(转速比)>A(间距)。根据秋刀鱼导向总时间回归方程作出等高线如图9所示。
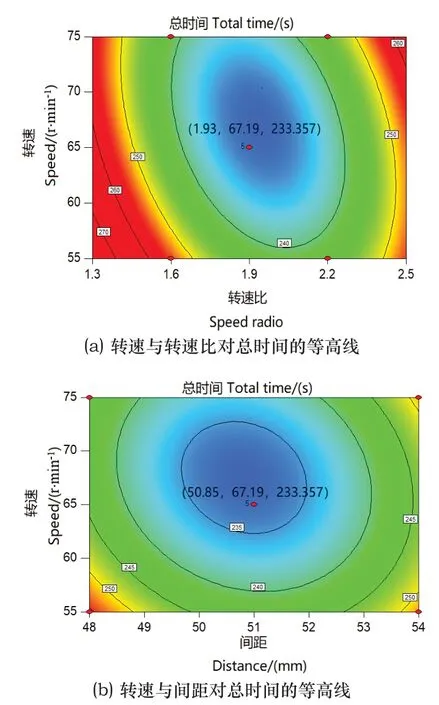
图9 各因素对总时间的等高线图

表3 正交试验结果表
4.2 确定参数最优参数和样机试验
通过对图9(a)、图9(b)所示的等高线的对比分析且本实验中最优解只有一个,确定的最佳参数为:间距为50.85mm,转速比为1.93,转速为67.19r⋅min-1,总排序时间为233.357s。即导向速度为每条2.33s。为了检验最佳参数的准确性,对其进行样机性能试验,依据最优参数调节工作参数。通过对100条秋刀鱼进行性能测验得出:总排序时间238s,即输送速度每条为2.38s。此时鱼体损伤个量为12条,损伤率为12%。试验结果基本与仿真结果相符。
5 结语
本研究设计一种秋刀鱼的导向装置,同时也对其导向装置进行了原理分析、参数优化及性能试验。分离机构主要由电磁振动器和双漏嘴型漏斗组成,可以使秋刀鱼逐条地输送到传送带上,在限位组件的作用下,秋刀鱼垂直地输送到导向机构处,基于差速原理的导向装置,通过摩擦力的不同,对秋刀鱼进行导向作用。为了得出导向机构的最优参数,在单因素试验的基础上,设计了三因素五水平的二次正交旋转组合试验.当间距为50.85mm,转速比为1.93,转速为67.19r⋅min-1,装置能达到最好效果。同时基于最佳参数,通过100条秋刀鱼进行性能试验,试验结果基本与仿真结果相符。
本研究对秋刀鱼的分离导向装置的结构参数进行了优化设计,但并未考虑到对秋刀鱼的投入量、导向轮的半径、秋刀鱼导向后的状态等因素的影响。所以需要继续研究其理论、完善实验,提高装置的适应性。
猜你喜欢
浙江大学学报(理学版)(2022年1期)2022-02-21
水电与抽水蓄能(2021年2期)2021-05-14
农业工程学报(2021年4期)2021-05-09
昆钢科技(2021年1期)2021-04-13
文萃报·周五版(2020年40期)2020-11-06
环球人物(2020年19期)2020-10-10
农业工程学报(2020年6期)2020-05-19
启迪与智慧·上旬刊(2019年5期)2019-09-10
作文·初中版(2019年8期)2019-09-09
食品与生活(2018年4期)2018-07-30