
转向制动联合的线控转向汽车防侧翻控制研究
2023-02-09 01:22邹梓杰严运兵
机械设计与制造 2023年1期
邹梓杰,严运兵
(武汉科技大学汽车与交通工程学院,湖北武汉 430065)
1 引言
侧翻事故会给人的生命财产带来极大危害,根据美国国家公路交通安全局(NHTSA)统计数据显示[1],汽车侧翻事故虽然只占总交通事故的8%,但它所导致的人员死亡率却高达31%。为了减少由侧翻引起的交通事故,各大汽车制造商纷纷推出了自己的防侧翻系统[2],如美驰威伯科合资公司开发的RSC系统,采埃孚公司的CDC技术、结合了多种车辆动态控制系统的EMA等,最大限度地确保车辆免受侧翻的危险。
通常情况下,在研究防侧翻控制策略时,往往只考虑了如何避免发生侧翻,而忽略了行驶路径的保持。例如,线控转向汽车在高速行驶时遇到前方有障碍物,需要打方向盘紧急避让,车身稳定性系统检测到有侧翻危险,立即通过主动转向控制器附加反向的前轮转角,此时,虽然防止了侧翻的发生却没能避开障碍物。
侧翻和路径保持问题也是研究的热点,文献[3]对车辆的稳定性与轨迹控制进行了研究。文献[4−5]对主动转向和差动制动的联合防侧翻控制策略进行了研究。文献[6]提出了一种基于临界值权重控制的大客车防侧翻控制及路径保持控制策略,提高了大客车防侧翻和轨道保持的能力,但没有深入研究不同的控制方法对防侧翻和车道保持能力的影响,缺乏一定的说服力。文献[7]希望通过加入差动制动控制来减小主动转向角度的输入,达到防侧翻的同时减小转向轮转角的改变。
这里基于线控转向系统[8](Steer−By−Wire,SBW),在主动转向和差动制动协同防侧翻控制的基础上,研究分析了主动转向角度和差动制动力矩大小对防侧翻和路径保持能力的影响,制定了两者协同控制策略,并确定两者作用权重,最大程度地保持原有行车路线。
2 侧翻模型
2.1 侧翻模型建立
汽车侧翻[4]指的是汽车在行驶过程中绕其纵轴线转动90°或者更大角度,导致车身与地面相接触的一种极其危险的侧向运动。建立汽车的侧翻模型有助于弄清汽车侧翻产生的机理,得到车辆侧翻预警因子的解析表达式,为汽车的防侧翻控制策略提供理论依据,汽车的侧翻模型,如图1所示。
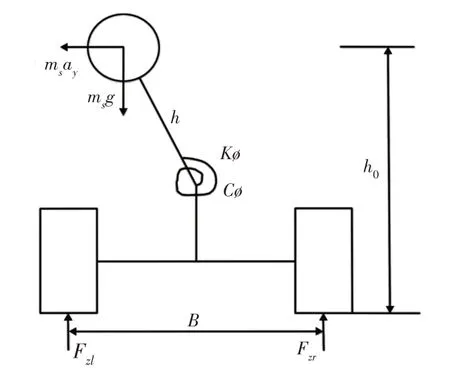
图1 侧翻参考模型Fig.1 Rollover Reference Model
以侧倾中心为原点取矩,忽略前后轴的轮距差异以及非簧载质量,且侧倾角很小,可得:
式中:ms—簧载质量;ay—侧向加速度;Fzl、Fzr—左右车轮垂向载荷;ϕ—侧倾角;h—质心到侧倾中心的距离;B—轮距;h0—质心到地面的距离;Kϕ—侧倾刚度;Cϕ—侧倾阻尼系数。
2.2 侧翻预警因子
为了对车辆进行主动控制防止侧翻发生,首先要确定衡量车辆即将发生侧翻的指标值。衡量汽车侧翻的指标有SSF(Static Stability Factor)、SM(Stability Margin)、RPM(Stability Margin)、LTR和TTR,由于实时性较好,常以汽车的横向载荷转移率(Lat‐eral−load Transfer Rate,LTR)这一动态指标作为汽车的侧翻预警因子[9]。横向载荷转移率定义为左右轮胎垂直载荷之差与整车总的垂直载荷之比,其表达式如下:

且:

式中:G—汽车总的垂直载荷。
整理式(1)~式(6)得,

当LTR=0时,汽车没有发生侧翻的风险;汽车侧倾时,左右轮胎的垂直载荷发生转移,LTR值在之间变化。当汽车的LTR值在±1之间变化时,汽车有向一侧发生侧翻的趋势;当|LTR|≥1时,内侧轮胎离地,发生侧翻,即对于不同车型和行驶条件,侧翻发生条件唯一确定。为了预防侧翻发生,取|LTR|=0.8作为侧翻的预警值[9]。
3 权值分配的联合防侧翻控制方法研究
3.1 车轮制动方案选择
差动制动是指对汽车某个轮胎或某几个轮胎上施加不同的制动力矩,从而产生一个附加横摆力矩,来抑制某一方向上的侧向加速度或横摆角速度过度的情况。对不同车轮施加制动力时对车辆产生的横摆力矩效果[3],如图2所示。可以看出对汽车后内轮制动时产生的横摆力矩效果最明显,其次为前外轮。当对前外轮制动时,产生的横摆力矩方向恰好与汽车转向方向相反,有增加不足转向的趋势,而且会减小汽车的侧向加速度,使转向趋于平稳。因此,当汽车过度转向时,如果采用对单独前外轮制动的方式,最能有效抑制侧翻的发生。

图2 车轮制动力与横摆力矩大小的关系Fig.2 Relationship between Wheel Braking Force and Yaw Moment
3.2 主动转向方案选择
根据前文分析,当汽车有发生侧翻的趋势时,针对传统汽车采用的方法[3]是,通过自带的ABS系统实现差动制动控制,产生附加横摆力矩,防止车身向一侧倾斜。而配备线控转向系统的汽车利用其前轮转角可灵活改变的特点,可以主动减小转向轮的转角,产生反向于转向方向的横摆力矩,来减小汽车的侧翻趋势。研究的重点在于,如何调节线控转向汽车主动转向和差动制动控制的比例,使其能够达到防侧翻的同时较好地保持预计的行车轨迹的目的。
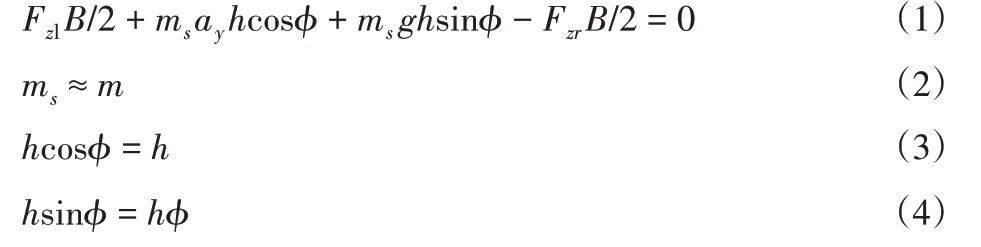
联合控制框图,如图3所示。
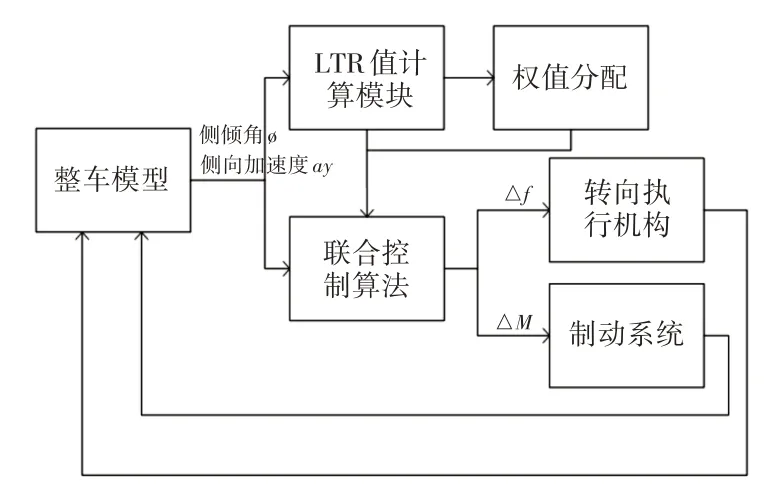
图3 联合防侧翻控制系统结构Fig.3 Schematic Diagram of Combined Anti−Rollover
根据整车模型得到的车身侧倾角、侧向加速度计算LTR值,如果LTR值超过了预警值,再根据LTR值与预警值的差值、侧向加速度的大小计算出制动力矩ΔM、附加转角Δf的大小。
差动制动作用的制动力矩ΔM由汽车的侧向加速度乘以比例因子k得到,主动转向的附加转角Δf由模糊PI控制器得到,模糊规则,如表1所示,偏差e表示LTR值与预警值的差,ec表示偏差的变化率。前轮的实际转角为驾驶员期望的转角与附加转角之和,其表达式为:δ=δf+Δf。

表1 模糊控制规则表Tab.1 Fuzzy Control Rules
3.3 影响权值的因素
从动力学的角度分析,对车轮分别施加不同横向控制和纵向控制会对车身的运行姿态造成不同的影响。分析主动转向附加转角的大小和差动制动力矩的大小单独作用时对车身稳定性的影响,有利于帮助确定联合控制时的权重值。
利用在Carsim/Simulink 中建立的线控转向整车模型,进行联合仿真实验,通过分析离线仿真结果,找到附加转角大小和制动力矩大小对车身横向载荷转移率以及横摆角速度的影响,最终可以确定协同控制作用时的加权系数。
(1)附加前轮转角大小的影响
仿真时在Carsim 软件中将初始车速设置为70km/h,目标前轮转角为20°,分别对前轮附加转角为−2°、−4°、−5°、−10°,得到的仿真结果,如图4、图5所示。

图4 LTR值与附加前轮转角大小的关系Fig.4 Relationship Between LTR and Front Wheel Angle
(2)制动力矩大小的影响
仿真时给前外轮施加一个恒定不变的制动力,观察制动力矩分别为1MPa、2MPa、3MPa、5MPa时LTR值的大小和横摆角速度变化的情况。仿真结果,如图6、图7所示。
从图4、图5可以看出,附加前轮转角的绝对值越大,横向载荷转移率越低,汽车的侧翻趋势越小;同时,随着附加转角绝对值的增加,汽车的实际转向角将大幅度改变,其道路保持能力会越来越差。
图5 横摆角速度与附加前轮转角大小的关系Fig.5 Relationship Between Yaw Rate and Front Wheel Angle
从图6、图7可以看到增加制动力的大小,横摆角速度也随之降低,横摆角速度降低会导致汽车的侧向力降低,从而侧向加速度降低,汽车的横向载荷转移率下降。
图6 横摆角速度与制动力矩大小的关系Fig.6 Relationship Between Yaw Rate and Braking Torque

图7 LTR值与制动力矩大小的关系Fig.7 Relationship Between LTR Value and Braking Torque
与差动制动相比,主动前轮转向防止侧翻效果更为明显,但汽车很快便会偏离预定的行驶路径;单一的差动制动对横摆角速度的影响不大,而横摆角速度的变化正相关于车辆沿曲线行驶时的半径[10],增大差动制动作用的比例有利于保证车身按驾驶员预计的路径行驶。
3.4 权值大小的确定
附加的前轮转角和差动制动力矩都会产生作用于车身的横摆力矩。则修正的总的横摆力矩为:

式中:ΣM—修正的横摆角速度;k1、k2—主动转向附加的转角和差动制动附加的制动力矩引起的横摆力矩的加权系数;M1、M2—由附加前轮转角和制动力矩引起的横摆力矩。
其中k1、k2的值满足如下关系式:

由前文分析可知,随着LTR差值的增大,主动转向的作用比例应该是缓慢增加的,而差动制动的作用比例应该是逐渐减小的,两条线在中间应该有一个交点。这是因为在侧翻风险较小时,不宜过多地改变前轮转角;在大侧翻风险时,宜采取能迅速减小汽车LTR值的控制方法,显然主动转向防止侧翻发生的效果更为显著。因此,拟确定的联合控制的权值与LTR偏差值的关系,如图8所示。
图8 权重系数分配Fig.8 Distribution of Weight Coefficient
4 硬件在环试验
基于MATLAB/Simulink、dSPACE/MicroAutoBox快速控制原型,结合方盘、性能测试设备等搭建硬件在环仿真平台,设计方案,如图9所示。

图9 快速控制原型方案图Fig.9 Rapid Control Prototype
试验中,利用MATLAB的RTI生成可移植的代码,将整车模型以及控制策略写入快速控制原型控制器进行在线试验。通过采集方向盘转角信号,得到期望的前轮转角,LTR值由模型获得并反馈至控制器,模糊控制器根据LTR 的偏差值以及权值系数k1、k2,得到分配后的附加前轮转角和差动制动力矩,并作用于执行机构。
试验过程中的LTR 值、横摆角速度、附加前轮转角均通过ControlDesk实时观测并记录。硬件在环测试系统,如图10所示。

图10 硬件在环测试系统Fig.10 Hardware In−the−Loop Test
试验时,以70km/h的初始速度进行角阶跃转向,线控转向系统角传动比i=15。在0.2s内将方向盘迅速向一侧打至75°,3s后继续将方向盘打至135°,转角输入,如图11所示。

图11 方向盘转角信号Fig.11 Steering Wheel Angle
横向载荷转移率LTR、横摆角速度wr和前轮附加转角曲线及相关平面图,如图12~图14 所示。从图12 中可以看出在1.5s和3.5s时,LTR值超过了侧翻阈值0.8,此时若不对汽车施加主动控制,则很有可能发生侧翻。汽车将要发生侧翻时,带权重值的协同控制策略能够使汽车迅速恢复到稳定状态,使横向载荷转移率降到0.8以下,而单独主动转向控制超调量几乎达到了25%,相较于其他三种控制方案,单独依靠差动制动不能使汽车很快地恢复到安全行驶状态,差动制动控制下的LTR 值进入稳态时间更长。而在汽车将要发生侧翻时,单独依靠差动制动不能使汽车很快地恢复到安全行驶状态。
图12 横向载荷转移率Fig.12 LTR
图13 行驶轨迹Fig.13 Driving Track
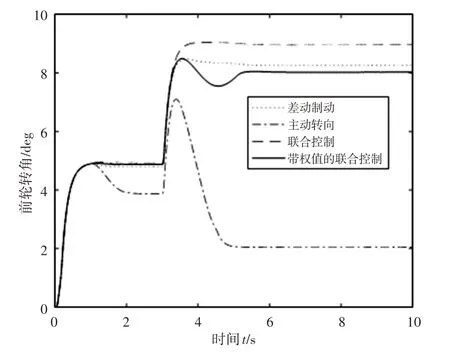
图14 实际前轮转角Fig.14 Actual Front Wheel Angle
比较四种控制方法的车辆行驶轨迹,由于差动制动控制没有直接改变前轮转角,因此对行驶路径的改变量最小,可以作为期望路径的参考。主动转向控制偏离原有轨迹最为明显。而两种联合控制对比,在带权值的控制下,汽车实际行驶轨迹更接近原本轨迹,这是因为,在前3s时,由于LTR值不大,两种控制中的主动转向控制因素基本相同,因而轨迹偏差不大;3s之后,LTR值到达顶峰,带权值的联合控制中,主动转向因子比例下降,差动制动因子上升,因而轨迹更优。
从图14中可看出,采用单独主动转向控制下的前轮转角改变量很大,达到6°左右;权值分配联合控制对前轮转角的改变小于不带权值的联合控制,仅为1°左右,对的汽车的实际行驶方向改变更小。由分析结果可知,采用权值分配的主动转向和差动制动协同控制策略,能够满足在防止侧翻发生的前提下,尽可能地不改变汽车的行驶路径与前轮转角。
5 结论
(1)以横向载荷转移率LTR作为侧倾判别的标准,具有普遍性,适用于各类汽车。
(2)可以通过仿真实验的方法得到不同的附加前轮转角以及制动力矩对车身姿态的影响,从而确定联合控制的权重值。
(3)利用dSPACE硬件在环实验,证明了典型工况下,权值分配的协同防侧翻控制策略具有优越性,既可以保证汽车在即将失稳的情况下不发生侧翻,又可以使汽车最大限度地按照原有路径行驶。
(4)联合控制策略中的权重取值采用了线性方法,有必要优化,这是本研究今后的工作方向
猜你喜欢
现代临床医学(2021年1期)2021-01-26
通化师范学院学报(2020年12期)2020-12-21
小学生学习指导·爆笑校园(2019年6期)2019-09-10
电子制作(2019年10期)2019-06-17
电子制作(2018年14期)2018-08-21
中成药(2017年6期)2017-06-13
电子制作(2017年10期)2017-04-18
电子制作(2017年23期)2017-02-02
红蜻蜓·低年级(2015年11期)2016-02-02
中国自行车·骑行风尚(2014年4期)2014-10-10
