
变速器齿轮非线性振动机理研究及稳定性分析
2023-02-09 01:22李成冬吕红明
机械设计与制造 2023年1期
李成冬,吕红明,杨 旭,刘 业
(盐城工学院汽车工程学院,江苏盐城 224051)
1 引言
传动噪声的原因是复杂的,齿轮噪声是主要的问题之一,其尖叫的主要原因是负载齿轮副的传动误差。国内变速器的早期发展主要是从可靠性出发,未将振动和噪声特性作为主要目标。随着传输啸叫的控制问题越来越突出,齿轮噪声成为变速器噪声的主要噪声源。
目前而言国外对变速器噪声控制技术较为成熟。文献[1−4]分析了一种先进的齿轮传动接触力和变形模型,给出了单级直齿圆柱齿轮传动在多个载荷水平下获得载荷传递误差的方法。文献[5−8]研究了齿轮副的非线性频率响应特性,并对其内外激励进行试验。文献[9−10]利用噪声数采设备对啸叫进行采集,提出了解决齿轮啸叫的主要方案,验证了齿轮修形对齿轮啸叫的影响。文献[11]通过噪音和振动的传感器,发动机和车辆相关部件测试和分析了各种传感器测试和频率分析技术。但是,由于前期研究者针对的研究重点不同,以及啸叫振动问题本身的复杂性,研究结论的一致性有待验证。
在前期研究基础上,针对变速器齿轮建立单自由度非线性摩擦振动力学模型,进行了系统稳定性分析;并通过数值计算方法分析齿轮摩擦振动参数对变速器系统的影响机理,考虑了齿侧间隙、阻尼比、激励频率等重要非线性因素在何种状态下最大程度降低齿轮传递动力时产生的噪声,找出最佳的啮合状态,减少啸叫噪声提高整车行驶舒适性。
2 变速器齿轮传动系统模型建立
变速器齿轮噪声产生过程导致不理想的齿轮啮合和齿轮传动误差,由于变形和误差、齿轮系统的振动、齿轮的动态噪声和部件自身的动态特性,动态啮合力的产生是由齿轮啮合的时变刚度引起的。研究时不考虑时变因素、传动误差碰撞前后的影响,以及系统输入扭矩和负载转矩的变化。利用变速器传递动力时,由于只有单对齿轮啮合所以将其作为单独部分拿出,仅考虑一对齿轮的啮合情况。建立了考虑间隙、阻尼和激励频率的单自由度正齿轮啮合间隙的非线性动力学模型。
2.1 间隙非线性动力学模型建立
在齿轮传动系统的研究中,将其化为单对齿轮的啮合来进行研究。采用质量集中法建立模型,将系统化为由质量块,弹簧和刚性圆盘组成。齿轮系统的固定中心是不变的,即传动轴的刚度足够大不会产生横向振动,忽略齿轮转动时与支撑轴承间产生的摩擦。考虑时弹簧刚度系数为常数,齿轮的啮合刚度由弹簧刚度系数表示。阻尼系数是基于两个齿轮啮合时的阻尼,齿轮被简化为刚性盘,由弹簧和阻尼连接。建立模型,如图1所示。

图1 单对齿轮动力学模型Fig.1 Single Gear Pair Dynamic Model
图中:rb1,rb2—主、从齿轮的基圆半径;I1,I2—两齿轮的转动惯量;θ1,θ2—两齿轮的扭转角位移;T1,T2—主动齿轮和从动齿轮上的扭矩;Cg—齿轮啮合的阻尼系数;K()τ—齿轮的啮合刚度;e(τ)—齿轮啮合的综合误差。
2.2 基于模型齿轮啮合间隙非线性动力学微分方程及方程简化
根据牛顿力学定律,可得系统的运动微分方程为:
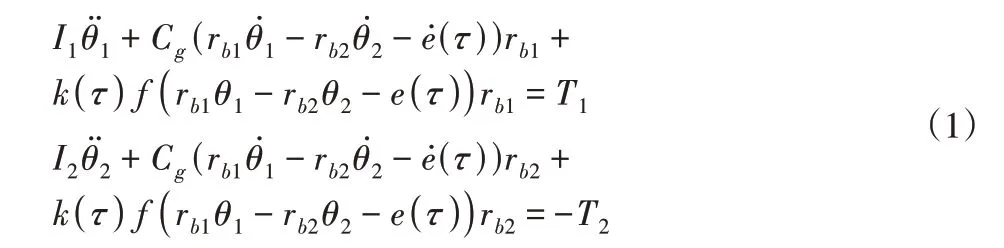
其中齿侧间隙是齿轮啮合力的非线性函数,设齿轮副侧隙为2b,则分段特性f(x)的间隙函数为:

设主、从齿轮在啮合线上的位移为x1,x2;那么x1=rb1θ1,x2=rb2θ2;对式(1)、式(2)分别除以rb1,rb2。
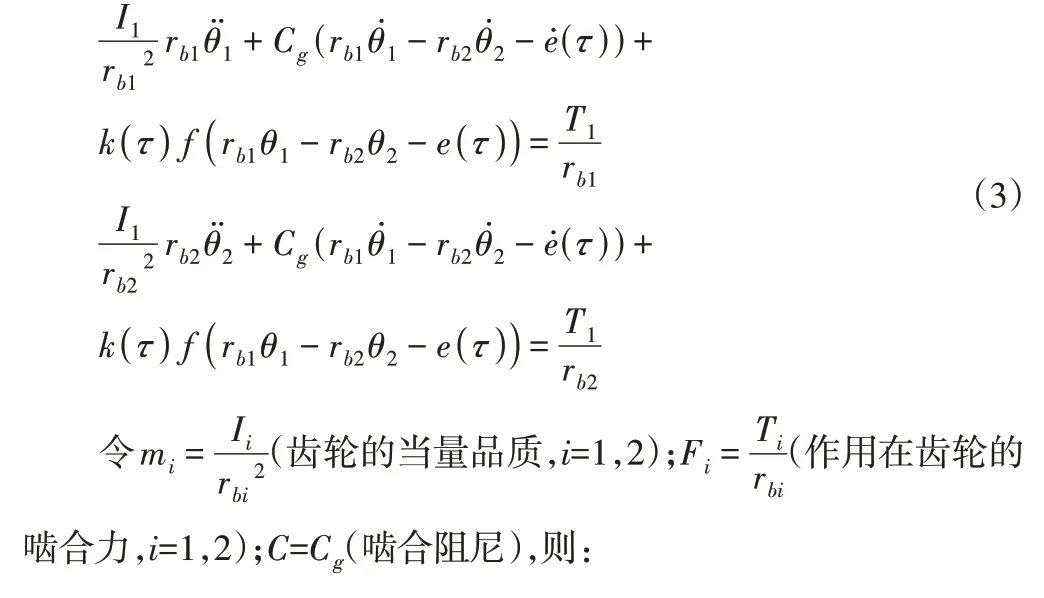

x1,x2运动是相关的,在不断变化的过程中需要获得齿轮间的动态响应。因此,消除了刚体位移简化了方程,将其转化为独立坐标。
传动误差是在齿轮传动中当主动齿轮转过一定角度时,从动齿轮理论转角由于齿轮副本身结构或者制造安装的因素等,而使其与实际转角不相等。实际转角和理论转角之差即传动误差。
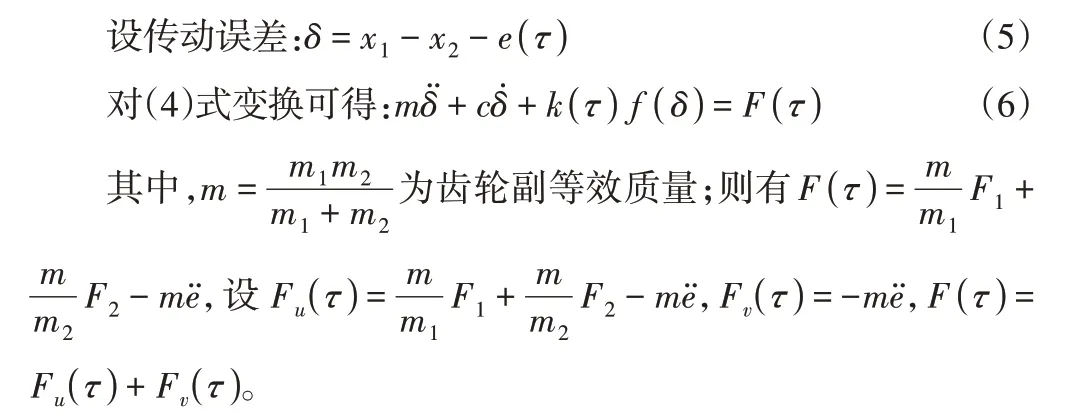
式中:Fu(τ)—外部激励(输入和输出力矩的波动引起对系统的激励);Fv(τ)—内部激励(产生原因是齿轮本身的制造和安装的误差引起对系统的激励)。
一般情况下,内部激励和外部激励都是时间的周期函数,这两个周期是不一定相同的,以傅立叶级数的形式表示:


3 基于MATLAB的齿轮传动动力学仿真
3.1 间隙变化时系统的响应
固定激励频率ω,阻尼比ζ和保持激励幅值比在一定比例条件下,尝试改变间隙b来观察系统非线性动力性。在规定条件下,设激励频率ω=1,阻尼比ζ=0.02,激励幅值取值Pm=0.1,Pa=0.2保持激励幅值比为0.5。
取间隙b的值为0,0.1,0.5 较大范围内观察产生混沌现象。选择系统初值为x(t0)=0,(t0)=0对系统进行计算。
系统响应的时域波形图、相图、Poincare图,如图2所示。
当处于理想情况下,即间隙b=0,取积分步长为1/100,如图2(a)所示。从时域波形图可以看出,在大于250个周期之后系统转趋于稳定,出现拟周期运动。由相图也可以看出,b=0时,振幅逐渐稳定到5.092附近,谱图具有明显的主频率。齿轮处于理想情况下啮合运行。当间隙b不为零,即非理想情况下。
由图2(b)可以看出在齿轮系统出现间隙时,原来基本稳定的周期运动消失。在b=0.1的情况下呈现了拟周期的情况,谱图的主频率依然明显。虽与间隙为0时情况相近,但系统的确出现了不稳定情况,齿轮产生啮合冲击问题。


图2 不同齿侧间隙b下的系统响应Fig.2 System Response under Various Gear Side Clearance
持续扩大间隙b时,如图2(c),间隙b=0.5时,前期系统处于混沌状态,啮合出现问题经过一定的时间系统又趋于相对稳定,出现两倍拟周期情况,谱图出现两个明显的频率。此时可以发现齿轮啮合没有出现齿背冲击(即Xmin<−b)。其后随着间隙的继续扩大,系统的非周期性和非线性程度越来越强。间隙在0.5时,混沌状态明显,频率也由原来的离散状态渐渐转向连续。齿轮啮合的冲击现象从双面冲击逐步向单面冲击和无冲击转变。在间隙达到一定值后,冲击状态变为单边冲击并随着间隙的增大而保持单边冲击或无冲击状态。之后无论间隙如何增大一直保持冲击状态。
3.2 阻尼比变化时系统的响应
研究阻尼比ζ对齿轮系统的影响时,用固定的间隙b=1,激励频率ω=1,依旧用固定的激励振幅比0.5,让Pm=0.1,Pa=0。齿轮的阻尼比变化一般在0.03到0.17之间,这里让阻尼比在(0~0.2)之间变化,观察系统响应的情况。

图3 激励频率ω=1,间隙b=1时系统随阻尼比变化的分叉图Fig.3 Bifurcation Diagram of the System with Damping Ratio when ω=1 and b=1
由上图可以看出阻尼比从0开始系统一直处于混沌状态,然后在阻尼比到一定极限值后,为两倍拟周期的状态,最后成为周期运动。如图4(b)时域响应没有周期性表现,相图呈现混沌状态,Poincare图上是许多分散的点。从阻尼比ζ=0开始系统呈现出混沌状态,齿轮的双面冲击状态严重,如图4(a)所示时域波形图没有出现任何周期性。当阻尼比增大的过程中,系统确实由混沌运动向周期运动变化。

图4 不同阻尼比时的系统响应Fig.4 System Response Under Various Damping Ratio
图4(b)在阻尼比为0.08时,相图和Poincare图看出在一定时间后出现拟周期现象。
谱图出两个突出的主频率,呈离散状。阻尼比继续增大的过程中达到一定的极限值,变为周期运动。如图4(c)所示,时域波形图在一定时间后呈现周期运动,Poincare图更加显出在稳定后的周期运动状态,之后的状态未出现齿背冲击,仅有齿面冲击。
3.3 激励频率变化时系统的响应
考虑了间隙和阻尼比的影响,固定间隙b=1,阻尼比ζ=0.02的状态下,改变激励频率ω来观察系统响应。
在什么情况产生混沌,在系统共振的频率范围内的情况有一定实际意义。
使激励频率在(0.6~2.0)之间变化。
从图5中可以看出系统在激励频率为(0.6~0.76)之间成三倍周期响应,如图6(a)所示。

图5 阻尼比ζ=0.02,间隙b=1时系统随阻尼比变化的分叉图Fig.5 System Changing with Damping Ratio of Bifurcation Diagram when ζ=0.02 and b=1
特定值激励频率为0.96 时,最终状态就是两倍周期运动,整体部分是越来越趋向稳定状态,在混沌状态中混入了几个周期解。
图6(b)和图6(c)中都呈现出稳定单周期运动。
图6(a)中时域响应图没有明显波动在400周期后呈现稳定状态,从Poincare图上看到集中在两个点上。
图6(b)从时域响应图中看出在一定时间后系统进入稳定状态,从Poincare图上取得600周期之后,图上只有一个点,系统稳定。
从图6(c)时域响应中可以看出在开始状态下振动幅度大,振动现象明显,经过一段时间后振幅明显减小变成稳定状态,Poincare图也能看出稳定后成周期运动,有一个明显的主频率。


图6 不同激励频率时系统响应Fig.6 System Response Under Various Excitation Frequency ω
4 结论
(1)齿轮传动系统的模型是单自由度,在齿轮传动中两齿轮之间不可避免的存在着间隙,影响不可忽视。间隙的不断增大,系统趋向混沌且没有任何周期性。
(2)随着阻尼的增加,系统趋于周期性地运动,从混沌状态转变为周期性的两倍周期的最终变化。
(3)激励频率的影响,是系统的状态有多段变化,其中穿插着周期解。
(4)随着间隙、阻尼比、激励频率的增大,啮合齿背冲击逐渐消失,呈现出齿面冲击。变速器齿轮的传动啸叫也随其而改变。非线性时混沌状态对初始值很敏感,不同的初始值得到的结果不尽相同。齿轮啮合的情况大部分从开始的双面冲击,在趋向稳定的过程中向着只有齿面冲击的状态发展,齿背冲击基本消失,由主动轮带动稳定传动减少齿背冲击。
猜你喜欢
物流技术与应用(2022年8期)2022-08-26
地震研究(2021年1期)2021-04-13
物流技术与应用(2020年4期)2020-05-06
军事运筹与系统工程(2019年4期)2019-09-11
振动与冲击(2019年4期)2019-02-22
中国自行车(2018年8期)2018-09-26
中国港湾建设(2017年11期)2017-12-19
制造技术与机床(2017年3期)2017-06-23
广州大学学报(自然科学版)(2016年2期)2017-01-15
系统工程与电子技术(2016年7期)2016-08-21
