
双曲轴驱动的八足趴卧式步行机器人设计分析
2023-02-09 01:22张久雷
机械设计与制造 2023年1期
张久雷,刘 静
(广东职业技术学院机电工程系,广东佛山 528041)
1 引言
大多数行走机器人的步行机构都是基于自然界的动物或昆虫仿生设计出来的[1−2],且控制系统复杂、价格昂贵、主要应用科研,难以教学应用或培训、科普教育应用;也难以在玩具、物流、搬运、娱乐等领域拓展应用。
这里设计研究的八足步行机器人是采用类似昆虫类爬行动物的外展趴卧式腿部结构;把爬行腿安装在机体侧面,可使机体在相对不大且重心相对偏低的情况下,可使爬行腿设计的较长,使其落脚点可以达到很大、很广的活动范围,能够更好地适应复杂的地形情况,且稳定性更好。
要求步行机器人具有良好的灵活性和地面适应性,就需要配备较多的驱动电机或传动系统,但可控自由度和控制难度将大幅增加。
因此,在满足运动条件下,驱动电机越少越好[3]。这里以2个电机分别独立驱动2条曲轴、进而分别带动与2条曲轴铰接的步行腿机构的技术,研发了一种八足趴卧式步行机器人。
该机器人每条步行腿机构均是由曲柄连杆机构组成的大腿、小腿及胯关节和膝关节;且每条步行腿均是由2 个曲柄控制,以实现其前后和上下摆动,能模拟昆虫类步行腿三维空间的爬行步态。
该机具有16个自由度,但只需2个电机即可实现控制整机的爬行运动要求,驱动电机少、价格低、组装简单;大幅度降低了制造装配中驱动电机的数量和原材料成本,利于批量制作和拓展应用;其曲轴结构设计、仿生步行腿设计和曲轴曲柄连杆驱动、传动系统的设计,均可为将来更好的完善八足及多足机器人开发应用提供参考依据。
2 步行腿机构设计原理
2.1 步行腿机构设计
八足机器人各爬行腿均采用关节式结构,均由曲柄、连杆、大腿、小腿及胯关节、膝关节组成。
每条爬行腿结构相同,且均有胯关节、膝关节2个自由度,整机具有16个自由度。
每条爬行腿均由2个曲柄控制,即每条爬行腿的胯关节和膝关节分别通过连杆与2个曲柄铰接,可实现模拟三维空间爬行步态,即一曲柄通过连杆驱动爬行腿做前后摆动动作,同时另一曲柄通过连杆驱动爬行腿进行上下伸缩的俯仰摆动运动。
其中胯关节自由度控制爬行腿的前后摆动,膝关节自由度控制爬行腿的上下俯仰摆动。单条步行腿机构原理,如图1所示。

图1 步行腿机构设计原理Fig.1 Walking Leg Mechanism Design Principle
2.2 步行机构运动学分析
把八足机器人任一步行腿的结构简化为由三条连杆和三个关节组成,这里以大腿与机体间的胯关节所在的点Ai1为原点建立基坐标系{A};同理,建立步行腿其他连杆的基坐标系,如图2所示。

图2 八足机器人步行腿连杆坐标系Fig.2 Walking Leg Coordinate System
八足机器人步行腿连杆坐标系有关参数,如表1所示。

表1 单条步行腿连杆参数表Tab.1 Parameter of Single Walking Leg Link
表1中,aj1是从zj1到zj沿着xj1测量的距离;αj1是从轴向矢量zj1到zj沿着连杆方向xj1旋转的角度,dj是从连杆方向xj1到xj沿轴向矢量zj测量的距离;θj是从xj1到xj沿zj旋转的角度[4−5]。
根据D−H齐次变换矩阵模型:

式中:i—各腿编号;可得出各连杆间的空间变化矩阵,分别为:
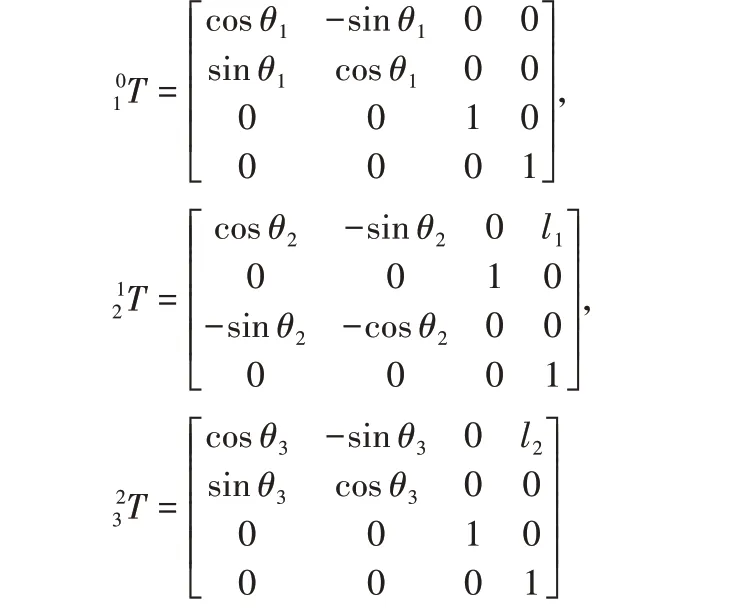
步行腿足关节的坐标系在基坐标系{A}中的变换矩阵:

根据以上立足点Ai在坐标系{A}中的位置矢量,可逆向求解出步行腿各关节的运动角度,如下:

3 整机方案与工作原理
3.1 总体设计方案
八足机器人采用交替四边形步态的爬行运动方式,即爬行时,机体一侧相间隔的2条步行腿与另一侧不同水平线位置的相间隔2条步行腿为一组组成四边形步态,一组4条腿同时摆动运动,与另一组4条腿组成的四边形交替支撑机体或伸缩抬腿摆动运动,从而实现机体预设的运动功能要求。
双曲轴驱动的八足趴卧式步行机器人的结构原理,如图3所示。

图3 双曲轴八足趴卧式步行机器人机构原理图Fig.3 Mechanism Schematic of Eight−Legged Crawling Robot
3.2 工作原理
机器人爬行机构由8个相同的爬行腿机构组成,对称设计安装在机体两侧;2条曲轴分别独立驱动两侧4个爬行腿机构;每条曲轴有8个曲柄,相邻2个曲柄方向相差90°的为一组共同控制1条爬行腿,可实现模拟三维空间爬行步态,即一曲柄通过连杆驱动爬行腿做前后摆动动作,同时另一曲柄通过连杆驱动爬行腿进行上下伸缩的俯仰摆动运动,模拟三维空间爬行步态运动。
机体一侧相间隔的2条步行腿与另一侧不同水平线位置的相间隔2 条步行腿为一组,步伐相同,两组步伐相反,即当一组前摆,另一组后摆;两组交替运动共同构成整机四边形爬行步态运动。
整机只需2个电机分别独立驱动2条曲轴,通过曲柄连杆机构进而分别带动与2条曲轴铰接的8条爬行腿的四边形步态协调运动,并通过两驱动电机的启停和正反转来控制机体启停、行走、调头等运动动作。
4 步态运动
4.1 步态运动原理
根据六脚昆虫三角形步态周期运动规律,即一组步行腿进行抬腿、前摆和下落并与地面接触的迈步过程,与另一组步行腿支撑机体并向后摆动的过程交替进行[6]。
设参数α为单条步行腿在一个步长周期内驱动阶段的时间与步长时间的比值,即:
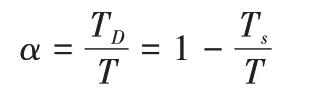
式中:TD—一个周期内驱动阶段的时间;TS—一个周期内迈步阶段的时间;T—一个周期所用的时间,且T=TD+TS。
波纹管的波纹结构有采用2个不同圆弧段和分别采用圆弧段、平直段2种方式。目前应用较多的是圆弧段与平直段相接的方式。文中即模拟圆弧与平直段相接的波纹管,并认为圆管内充满流动的流体,具体物理模型如图1所示。模型长度为180mm,直径为20mm。流体由左侧流入波纹管,由于流动为单相流动,不考虑重力对流动的影响。
设参数β为步行过程中支撑地面的步行腿个数,则β=n*α;
式中:n—机体步行腿的个数;
将α定义为占地系数。则机体的平均速度:

式中:L—步距。
以上公式可以看出:在步距L和迈步阶段时间TS都不变的情况下,α值越小,机体速度越快;
对于单条步行腿来说,α值越大,此条步行腿支撑地面的时间越长,即机体承受载荷的时间也越长。
当机体步行腿的个数n不变时,β值就越大,即单位时间内支撑地面的步行腿个数就越多,机体越稳定,机体承受载荷的也越大[7]。
4.2 八足机器人坐标及步行腿分组
八足机器人坐标定义及步行腿分组,如图4所示。对八足步行机器人步行腿进行编号为1~8。
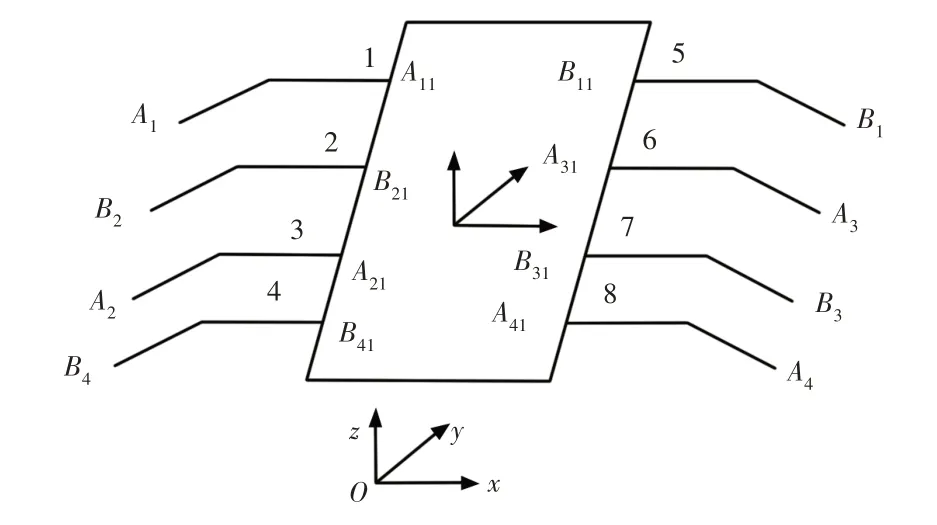
图4 八足机器人坐标定义及步行腿分组示意图Fig.4 Robot Coordinate Definition &Walking Leg Grouping
定义地面坐标系∑O,xOy与机身平行,Z轴与机身垂直;机身坐标系∑C,坐标原点与机体质心重合[8];Ai、Bi为步行腿末端立足点,Ai1、Bi1为步行腿与机体连接的胯关节点(i=1、2、3)。
八足步行机器人步行腿机械运动简图,如图5所示。
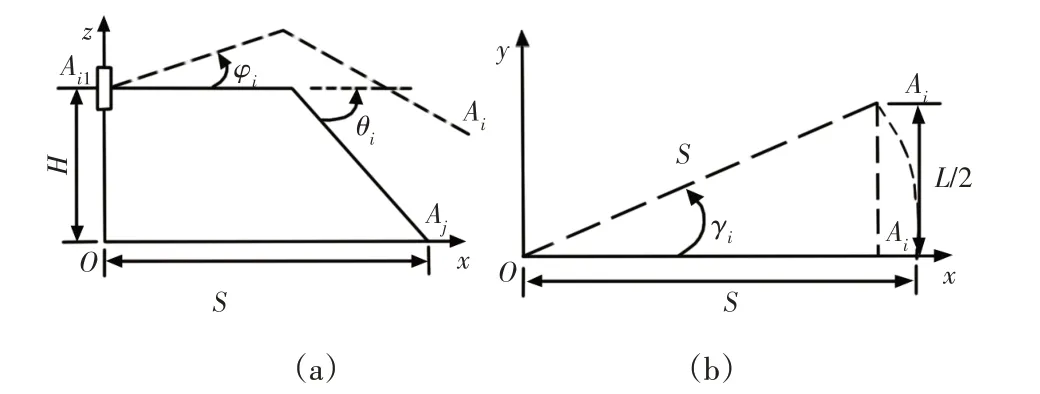
图5 八足步行机器人步行腿机械运动简图Fig.5 Walking Leg Mechanical Motion Diagram
设步行腿X轴投影长为S,Z轴投影高度为H,大小腿之间的夹角为θi;步行腿沿着Z轴旋转的角度为ϕi,步行腿沿着Y轴旋转的角度为γi。
由图3(a)可得八足步行机器人步行腿向上旋转ϕi角度时,步行腿末端立足点Ai在Z轴高度方向上提高了h距离,为:

由图3(b)可得八足步行机器人步行腿向前Y方向旋转γi角度时,步行腿末端立足点Ai在Y方向上前进了半个步距L/2,即:步距长L=2S*sinγi[8]。
4.3 步态运动方式
八足趴卧式机器人步态运动方式,如图6所示。
机器人可根据曲轴的初始安装状态使1、3、6、8号步行腿一组与2、4、5、7 号步行腿为一组组成机体的四边形步态,如图6(a)、图6(b)所示。也可使机器人按1、3、5、7号步行腿一组与2、4、6、8一组组成另外一种四边形步态[9−10],如图6(c)、图6(d)所示。
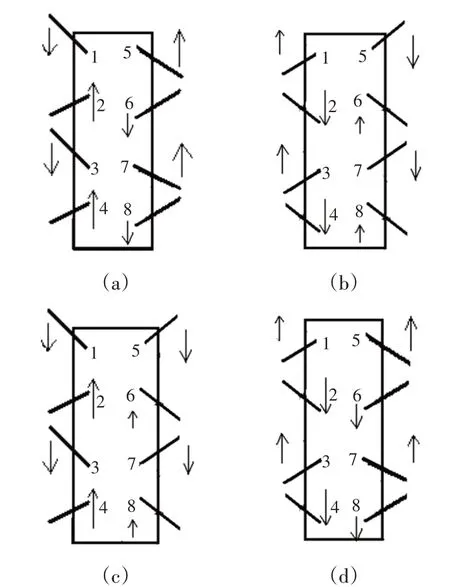
图6 步态运动方式Fig.6 Gait Movement
假设运动中的机器人到达图6(a)中1、3、6、8号步行腿完成向前的最大摆动极限状态,且进入支撑机体状态,使机器重心在1、3、6、8号步行腿组成的投影四边形内,确保机器运行平稳。
1、3、6、8号步行腿一边支撑着机体,一边向后摆动,使机体向前运动。与此同时,2、4、5、7号步行腿开始腾空离开地面,先向上伸展再向下收缩关节腿;在步行腿上下伸缩俯仰摆动的同时,步行腿也进行向前摆动动作。
当2、4、5、7号步行腿腾空完成最大的向前摆动动作后,进入如图6(b)的状态,即2、4、5、7号步行腿一边支撑着机体,一边向后摆动,使机体向前运动。
与此同时,1、3、6、8号步行腿开始进行腾空,上下伸缩俯仰和向前摆动,两组步行腿交替进行即可实现四边形步态运动。同理,图6(c)、图6(d)为另一种四边形步态运动方式。
5 其他机构与控制系统
5.1 传动系统
传动系统是用10mm*10mm 的铝合金方管材料制成一个400mm*153mm*62 mm的长方体为机架,由2个电机通过齿轮传动分别独立驱动2条曲轴,再由曲柄连杆机构带动步行腿运动。传动机构由机架、1个电源、2个电机、2条曲轴(内含16个曲柄)、4个齿轮、16条连杆组成。传动系统原理,如图7所示。

图7 传动系统原理图Fig.7 Driving System Principle
电机驱动力通过齿轮系、曲柄连杆机构系统传动给步行腿,从而驱动步行腿进行前后、上下摆动,其中与大腿铰接的曲柄带动大腿前后摆动、与小腿铰接的曲柄带动小腿进行上下俯仰摆动。
5.2 控制电路
机器人的整个控制电路由1个6V直流电源、1个组合开关S、2个负载金属减速直流电机组成。其中,组合开关S内含电源开关S1、控制电机M1、M2的开关S2和S3。
当电源S1接通后,若开关S2、S3同接电机M1、M2正转或反转,则机体直线运爬行动;若开关S2或S3中的任一个接通、另一个断路,则可使机器人以停止摆动侧的步行腿为支点进行左转或右转;若开关S2接电机M1正转、开关S3接电机M2反转或M1反转、M2正转,则机体原地调头。

图8 控制电路原理图Fig.8 Control Circuit Principle
6 样机制作及行走试验分析
6.1 样机制作
这里研制的双曲轴驱动的八足趴卧式步行机器人样机,如图9所示。
机体框架、8条爬行腿是采用(10×10)mm的铝合金方管材料设计制作,2条曲轴是用直径为4mm的铝棒设计制作,连杆选用直径为1mm金属线。
机体框架长400mm、宽153mm、高62 mm,每条爬行腿的最大伸长可达180mm,收缩时的长度为100mm,爬行腿伸缩幅度可达80mm。
选用额定电压为12V、输出扭矩为(1.5~5)kgcm、输出转速为70r/min,重约172g的直流电机。整机选用电压为6V、1.2Ah的直流小型蓄电池驱动两个电机,虽然转速度较慢,但仍可驱动整机爬行空运转运动。电机通过金属齿轮传动系统,起到减速增大扭矩的作用并驱动曲轴旋转运动,进而带动曲柄连杆机构运动,由此带动步行腿的前后摆动和上下伸缩、俯仰摆动,以达到机器人预期步态运动的目的。
6.2 样机可行性试验及结果
将样机进行空运转和着地负载运动可行性试验,行走试验表现用相机拍摄详,如图10所示。

图10 行走试验摄影剪接图Fig.10 Photographic Splicing of Walking Test
样机着地负载可行性试验结果不理想,进行着地行走试验时发现,整机无法运动,包括步行腿摆动、曲轴和电机的转动,都没有按照预设的运作。
经过分析,样机连杆选用铜线为制作原材料,质地较软,易变形,不能承受整机负载重量;电机驱动力较小,不能与整机重量负载不匹配,也有样机制作误差的原因使机器人在着地后不能正常运作。
因此,将在后续的完善设计开发中着力解决这些问题。
但行走空运转可行性试验时,样机可以实现四边形步态运动,可以进行四边形步态的前行、后退、拐弯等动作;空运转试验结果表明这里研发的双曲轴驱动的八足趴卧式步行机器人机械原理和运动学模型正确、设计方案可行,可以实现整机爬行运动要求。
该机驱动电机少、价格低、组装简单;大幅度降低了制造装配中驱动电机的数量和原材料成本,利于批量制作和拓展应用;其机械原理、曲轴结构设计、仿生步行腿设计和曲轴曲柄连杆驱动、传动系统的设计方案等,均可为将来更好的完善八足及多足机器人开发应用提供参考依据。
猜你喜欢
现代仪器与医疗(2022年4期)2022-10-08
装备制造技术(2019年12期)2019-12-25
设备管理与维修(2019年22期)2019-12-19
制造技术与机床(2019年4期)2019-04-04
电子制作(2018年18期)2018-11-14
自动化学报(2018年6期)2018-07-23
制造技术与机床(2017年5期)2018-01-19
中南大学学报(自然科学版)(2016年2期)2017-01-19
铁道通信信号(2016年10期)2016-06-01
中华骨与关节外科杂志(2016年3期)2016-05-17
