
针对多障碍陆战场路径规划的改进A*算法研究
2023-02-09 01:23张明路沈祺宗高春艳李满宏
机械设计与制造 2023年1期
张明路,沈祺宗,高春艳,李满宏
(河北工业大学机械工程学院,天津 300130)
1 前言
在多障碍陆战场环境中,路径规划[1]即为在存在障碍物的前提下,利用栅格法等方法构造地图,根据搜索算法(A*[2],D*[3],遗传算法[4],蚁群算法[5]等)生成从初始节点到目标节点的最优路径。其中A*算法作为静态启发式算法,更适合处理复杂障碍,并且它在解决静态全局规划问题时还具有参数少、效率高等优点。
文献[6]提出利用微分改进A*算法,有效降低了转折次数,但是涉及了大量计算;文献[7]一种改进的D*LIte算法—Field D*,对栅格进行线性插值使路径点不局限于栅格点中心,搜索方向也不再受限于π4整数倍;文献[8]则将该线性插值法应用于A*中,但是需要对栅格地图进行定义修改。因此提出一种将A*算法与元胞自动机[9]相结合的路径规划算法,改进估价函数使当前点可以直连扩展Moore的第二层邻域任意点,然后在依据通行性判定规则,继续修改估价函数,添加多组限制条件,进行第二通行次可行性邻域判定,从而对路径的可行性提供优化。
该混合方法不但减少了路径长度与转向角度,同时能在复杂环境中满足障碍物回避[10]。
经仿真验证,路径满足陆战场行军灵活性的要求,具有可行性与有效性。
2 A*算法改进
2.1 传统A*算法
传统A*算法属于全局路径规划,利用从初始状态和当前状态到目标状态估计所需的费用等信息,在选择下一个节点时对当前结点距离终点的距离作出估计。
设计估价函数是A*算法的核心,本实验估价函数参考欧几里得距离估价法,假设起点S的坐标(Hx,Hy),终点G的坐标(Mx,My),中间点N的坐标(Nx,Ny),则欧几里得距离表示为:

A*算法在搜索中设置两个表。Open表收录了已知生成而待遍历的邻域点,Close表中收录了已被遍历的邻域点。
若检查到在Open表中留存重复节点,则依照欧几里得估计函数计算并对照重整Open表中的搜索节点,并录入close表中。最后将保留下来的节点排列出来即为规划所得路径。传统A*算法流程,如图1所示。

图1 传统A*算法流程图Fig.1 Traditional A* Algorithm Flowchart
2.2 改进估价函数
传统A*算法虽然遍历效率高,但是首先由于搜索模式为直线搜索,使得传统A*算法中的最小转角为45°,当存在目标点与某一路径点间的相对角度小于45°时,路径会出现锯齿式的折叠。为了解决这一问题,设计将搜索邻域内的偏转角度继续缩小,因此参考元胞自动机理论,对A*算法的搜索领域进行改进,首先引入扩展Moore型邻域,如图2所示。其次,由于设置扩展Moore型邻域存在两层邻域点,即内层8个与外层16个,为了使路径能够直接连接最外层邻域,需要改进估价函数使其依旧能够遵循最小代价排序原则,如图3所示。

图2 常见3种元胞邻域结构Fig.2 Common 3 Cell Neighborhood Structures

图3 改进前后搜索方式对比Fig.3 Comparison of Search Methods Before and After Improvement
因此需要改进A*的估价函数,已知路径点的选择原则为选择邻域中f(x)最小值点,在图3中,需要使当前点A搜索B,C(或C,D)两点时,B(或D)点的f(x)小于C点的f(x)。则设存在一条直线k(x,y)经过目标点,分别改变目标点的x,y值,使目标点存在水平或垂直方向上的平移。设计该曲线拟合公式为:
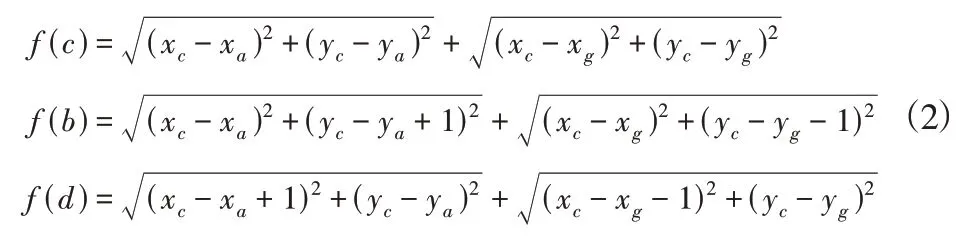
式中:xg,yg—位置目标点的坐标,A点为起始点。分别计算B(或D)点与C点的估价值f(B)与f(C)进行对比,根据获取多次曲线拟合图,如图4所示。

图4 系列1(AC)与系列2(AD)曲线拟合Fig.4 Series 1(AC)and Series 2(AD)Curve Fitting
计算f(C)与f(B)曲线值差,如图5所示。
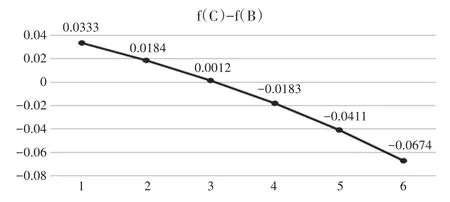
图5 系列1(AC)与系列2(AB)曲线差值Fig.5 Series 1(AC)and Series 2(AB)Curve Difference
由曲线拟合分析可知当遍历点为B或D点时,均存在一个固定值t,该值为B点或D点的x,y坐标与目标点坐标的差x1,y1的比值,即t=x1/y1,该值随B点或D点的选择而变。
由此,采用逼近原则,多次对B/D点选择不同的x1,y1值,计算其f值与t值,则多次计算获得的数值逼近,如表1所示。
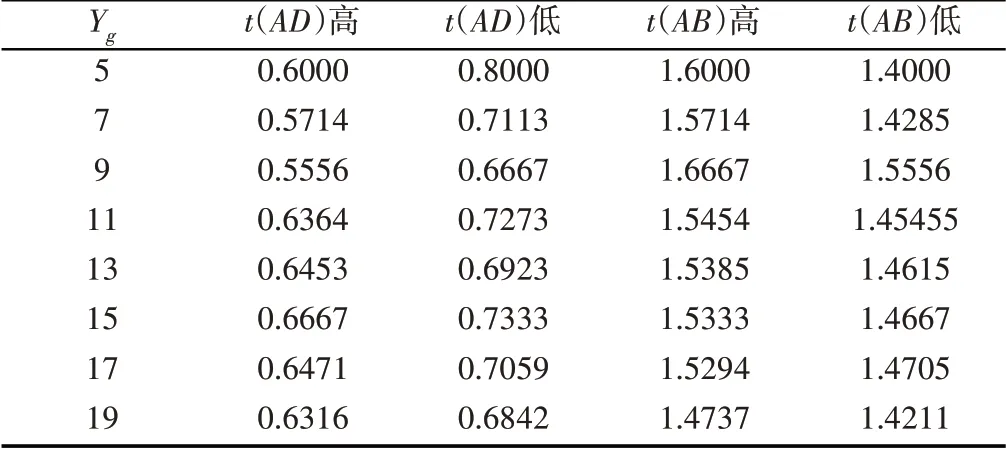
表1 数值逼近Tab.1 Numerical Approximation
计算可得t(AD)约为0.6667,t(AB)约为1.4721。下一步则需要将该t值融入到改进估价函数中。A*算法为启发式算法,具有方向性,其遍历方向一定指向目标点。由图3可知,BFGJ四点均相较于CKLM点发生了x轴方向位移,DEHI相较CKLM发生了y轴方向位移。因此均可适用于t(AB)和t(AD)。
根据曲线拟合结果,f(B)或F(D)与F(C)的值大小对比根据t值的变化而变化。因此在A*算法中添加流程,即每遍历邻域内的各点时,计算该点的t值并于t(AB)或t(AD)进行比较,同时考虑到内层可能存在障碍物,如图3 当C,O,N中存在一点为障碍物时,A点无法直接连接到B或D点。因此设置m(x),计算遍历点与A点直线经过的障碍数,设置n(x),计算遍历点与A点的直线距离。
至此归纳改进后的A*算法估价函数如下:

经过此步改进后,A*算法的搜索邻域将呈现为扩展Moore型,并且当邻域内无障碍时,外层节点的f(x)将小于内层节点,即满足A*规则且实现路径跨层连接。
2.3 添加通过性选择功判定
在复杂陆战场中,部队车辆需要随时临时调整,当通过狭隘路段时,可能出现被狭隘路口阻拦无法通行及掉头的问题。传统的A*算法只负责计算路径,为追求最短路径而可能规划出实际无法通行的路径,而没有考虑通过性问题。本实验考虑在路径搜索过程中添加筛选功能。由图2可见,扩展Moore型邻域具有24个遍历邻域,本实验假设部队车辆能够通过加上本车宽度换算到栅格地图上一共3个像素宽的路口,因此需要该拓展节点放入closel‐ist之前附近8个邻域必须为无障碍,即相邻8个栅格的值都为0。
因此将通行性判定简化为转换为大小为Moore型的车队能够行驶出扩展Moore型的最外层16个元胞的问题。在此归纳代表车队的9个元胞组成的Moore型数学集合为:

式中:Z—整数集合。归纳扩展Moore型外部16元胞数学集合为:

根据问题列出集合1能够从集合2的包围中正常行驶出的路线,即部分cj需要满足元胞值为0,分析可行路径得出cj需要满足如下条件:

归纳上述集合1集合2与通行条件,构造map函数,须同时满足集合1中c1=0与式(6),如式(7)所示。

式中:∑fMoore—以车辆为中心的Moore型邻域;f∑proMoore—扩展Moore 型外部16 个元胞。当式(7)满足式(4)与式(6)时,map(x,y)=0,判定当前区域可以通过。根据数学条件,建立通行模型,如图6所示。

图6 路口通行逻辑模型Fig.6 Intersection Traffic Logic Model
至此,获取符合通过性分析的邻域点,将此点存入closelist,继续循环流程直到完成路径规划。
修改过后的A*算法整体流程图,如图7所示。

图7 添加通过性分析后后的A*流程图Fig.7 A* Flow Chart After Passing Analysis
3 Matlab仿真实验
为验证A*算法改进后的效果,本实验根据战场环境模拟形成栅格地图,利用Matlab2018进行路径规划仿真。
3.1 扩展搜索邻域验证
改进后的A*算法能够实现跨网格的偏转,相较于改进前减少了路径长度与偏转距离,如图8所示。
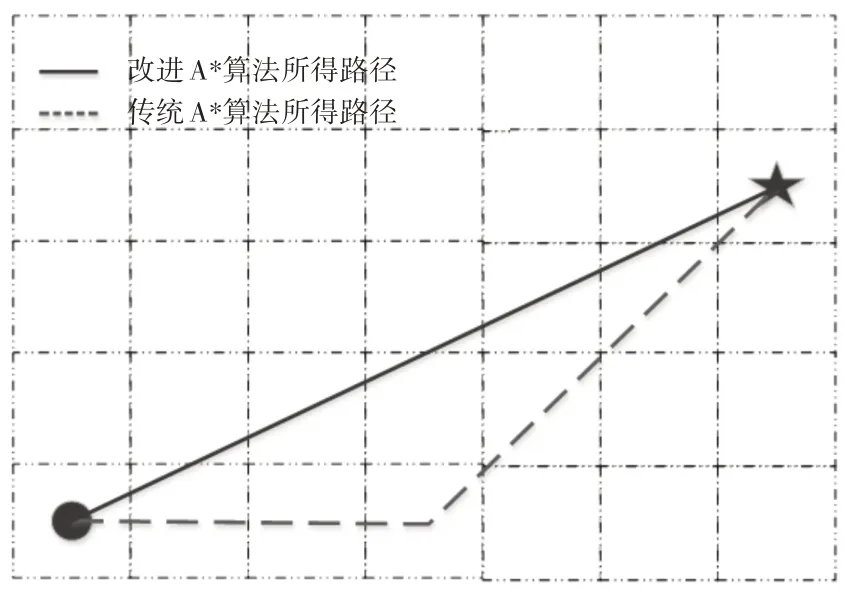
图8 改进前后路径对比Fig.8 Path Comparison Before and After Improvement
应用于100*100地图上,改进前后A*算法路径规划效果,如图9、图10所示。
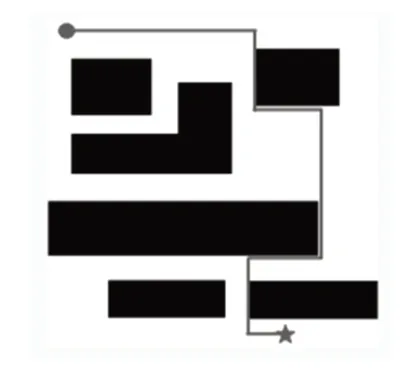
图9 改进前Fig.9 Before Improvement
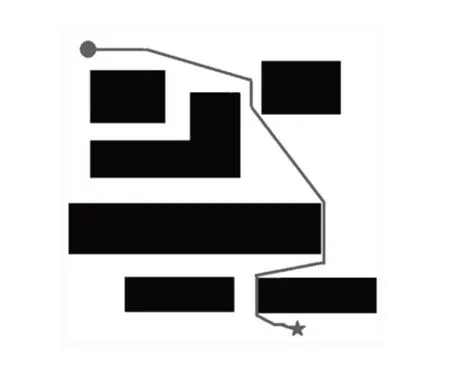
图10 改进后Fig.10 After Improvement
根据上述路径对比,获得数据分析结果,如表2所示。

表2 传统A*与改进后A*对比Tab.2 Comparison of Traditional A* and Improved A*
通过对比,经过对搜索邻域进行改进后,路径平滑度提升,同时路径长度缩短了13.16%,累计偏折角度减少26.8%。
可见改进搜索邻域后确实对算法实现优化。
3.2 通过选择性验证
为验证改进通过性选择分析前后效果,均在地图右下角设置一道狭隘路口,如图11、图12所示。

图11 传统A*算法Fig.11 Traditional A* Algorithm

图12 改进A*算法Fig.12 Improved A* Algorithm
可见相对于改进前,改进后的A*可以绕过狭隘路段重新规划路线,表明改进具有可行性。
4 结论
这里提出的改进A*算法搜索邻域、改进估价函数与添加通行条件判定函数,可将搜索邻域个数从单层的8个变为双层的24个,最小转交减小为18.3°,能够有效解决传统A*算法存在的路径非最短及转折角度过大的问题,增加的通过性逻辑判定函数能够有效绕过直径小于3 的狭隘路段,提高行驶的安全性与应变能力,相较于传统A*算法,更加适应实际道路环境。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
经营者(2022年9期)2022-11-14
房地产导刊(2022年5期)2022-06-01
气象学报(2021年2期)2021-05-13
现代计算机(2020年31期)2020-12-28
数学大世界(2020年2期)2020-03-07
艺术品鉴(2019年6期)2019-09-02
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
价值工程(2017年31期)2018-01-17
