
动力参数下乒乓发球机器人振动控制研究
2023-02-09 01:23张帆,周伟
机械设计与制造 2023年1期
张 帆,周 伟
(中国石油大学(华东)体育教学部,山东青岛 266580)
1 引言
乒乓球运动在我国是国球,是一种较为普及的运动,多数人民喜欢乒乓球运动,但是由于水平不同,难以找到合适的对手[1]。
一些专业队和国家队为了训练运动员都会购置乒乓发球机器人,乒乓发球机器人可以模拟专业运动员发出速度、旋转和落点都不同的球,并根据运动员的水平在运动过程中对发球策略进行调整,可以达到训练运动员的目的[2]。
但乒乓发球机器人在运行过程中容易产生振动,影响发球效果,因此,需要对乒乓发球机器人进行振动控制,提高训练效果。
文献[3]结合时域分析方法和傅里叶频谱分析方法对机器人的模态参数进行估计,根据估计结果设计控制器,通过控制器分析振动幅值对机器人运动产生的影响,在此基础上实现机器人的振动控制,该方法没有分析机器人的运动过程,控制后机器人还存在振动现象,存在控制效果差的问题。
文献[4]用非线性最优控制问题代替机器人振动控制问题,构建机器人关节模型,通过扩张状态观测器对其进行线性化处理,根据处理结果设计机器人最优控制率,完成控制,该方法在振动控制过程中对关节角的控制精度较低,存在控制效果较差的问题。文献[5]分析外部干扰、有效荷载变化和间隙等不确定因素对机器人运动产生的影响,在此基础上建立鲁棒控制器,利用该控制器完成机器人的振动控制,该方法控制机器人所用的时间较长,存在控制效率低的问题。文献[6]提出一种新型倾斜螺旋桨式乒乓球机器人运动的设计,通过创新的四旋翼结合了倾斜螺旋桨和状态依赖的迭代线性二次控制,达到控制效果,但是该方法由于追求多方面发展,导致发球过程的抗干扰能力较差。
针对上述乒乓发球机器人存在的问题,这里提出基于动力学分析的乒乓发球机器人振动控制方法,与上述学者考虑的角度不同,本文从动力学出发,构建机器人动力学模型,得到相关动力参数之间的关系,根据动力参数的关系构建振动控制系统,达到控制振动的最佳效果,以此解决乒乓发球机器人在运动过程中产生的振动现象,提高系统控制效果。
2 乒乓发球机器人动力学分析
将机器人的运动行为进行量化处理,以便从动力学的角度分析机器人的振动现象。构建O−XY坐标系,在坐标系内分析机器人的动力学参数的关系。通过机器人的工作原理和实际经验得出振动现象和乒乓发球机器人主动臂与从动臂角加速度、角速度和角度有关,因此,分析其具体的关系,这里建立乒乓发球机器人动力学模型,如图1所示。

图1 机器人动力学模型Fig.1 Robot Dynamics Model

不考虑轴向变形,乒乓发球机器人从动臂在运动过程中只存在弯曲变形,乒乓发球机器人动力学分析与振动控制方法通过假设模态法对弯曲变形进行模拟,用r描述从动臂中存在的任意一点在惯性坐标系O−XY中对应的位置坐标,其表达式如下:

式中:Ω—坐标变换矩阵;w—局部坐标系C−xy下该点对应的弹性变形,可通过下式计算得到:

式中:N—是振型数量;t—时间;qi(t)—第i个振型在运动过程中对应的模态坐标;ψi(x)—第i个振型函数;乒乓发球机器人的从动臂在运动过程中可以简化为简支梁,此时存在ψi(x)=sin(iπ/l2)。用描述该点的速度,可通过求导式(1)获得:

针对端点A、B用I1、I2描述乒乓发球机器人两个主动臂的转动惯量,用T1、T2描述主动臂对应的动能,可通过下式计算得到:
设U1代表的是乒乓发球机器人从动臂在运动过程中产生的弹性势能,其表达式如下:



在λ的基础上建立微分方程组:
通过上述分析,构建乒乓发球机器人的广义坐标约束方程:

在上述约束方程的基础上获得乒乓发球机器人主动臂与从动臂角加速度、角速度和角度之间存在的关系:
至此分析得到乒乓发球机器人的动力参数的关系,后文根据关系方程组,可以设计振动控制系统,进而控制振动效果。
3 振动控制
上述内容已经分析出乒乓发球机器人的动力学关系,如果直接对动力学参数进行控制、调节,机器人的振动现象的控制效果不佳,因此,为进一步提高控制效果,降低干扰,根据分析结果构建系统的状态空间:

式中:A(t)—乒乓发球机器人系统矩阵;x(t)—状态向量;B(t)—乒乓发球机器人的控制矩阵;u(t)—乒乓发球机器人的控制向量;y(t)—乒乓发球机器人的输出向量;C(t)—输出矩阵。
设置二次型性能指标函数J,可通过下式计算得到:
式中:[t0,tf]—时间间隔;e(t)—误差量;Q(t)—半正定对称的时变矩阵;R(t)—正定对称的时变矩阵。
乒乓发球机器人振动控制问题可以描述为:在受到外界干扰情况下导致乒乓发球机器人偏离平衡状态时,为了使机器人系统状态x(t)恢复到平衡状态,需要引入控制向量,最小化性能指标函数。
当性能指标函数在终端时间tf限制存在极小值的最优控制u*(t)时,此时满足上述要求的必要条件可通过下式进行描述:

式中:P(t)—对称非负定矩阵,此时最优性能指标转变为下式:

上式中的P(t)通常情况下符合Riccati矩阵微分方程[9−10]:

上述方程的终端边界条件可以表示为P(tf)=F,通过求解下述微分方程,获得最优曲线x*(t):

乒乓发球机器人的状态空间可通过下式进行描述:

式中:u(t)—输入量,即机器人系统的控制电压;y—乒乓发球机器人的振动位移,即系统的输出量。
乒乓发球机器人的平衡状态通常情况下是稳定的[11],因此可忽略终端积分项,测试性能指标函数为:

乒乓发球机器人的振动控制属于最优控制问题,因此将控制电压作为最优输入量,最小化二次性能指标函数:

式中:G—状态反馈增益矩阵;P—满足Riccati方程的常数矩阵。此时获得的乒乓发球机器最优曲线x(t)如下:

利用最优曲线构建最优控制器,完成乒乓发球机器人的振动控制,最优控制器结构,如图2所示。

图2 控制器结构Fig.2 Controller Structure
4 实验与结果
为了验证这里方法的有效性和先进性,进行测试实验。实验研究对象乒乓发球机器人,如图3所示。
该测试采用仿真模拟的方式,利用Simulink工具完成测试对象的振动位移等,其属于MATLAB 软件平台。实验指标设定动态性能测试的方法。首先确定乒乓发球机器人的振动响应(设定条件为转速为90rad/s,转角为90°),如图4所示。
图4为未使用任何方法的振动效果图,以此为分析对比的基础,进行振动实验,通过振动产生的位移大小,对实验进行评定,将通过这里方法进行控制的振动位移与文献[3]方法和文献[4]方法的振动位移进行对比分析,并且将振动位移之间差异作为实验结果输出,以此完成实验实施过程。为确保这里方法具备更高的稳定性,在本次实验中增加机器人运动时,电压波动的对比分析,分析不同控制方法的稳定性能。采用这里方法、文献[3]方法和文献[4]方法对上述振动进行控制,振动控制结果,如图5所示。
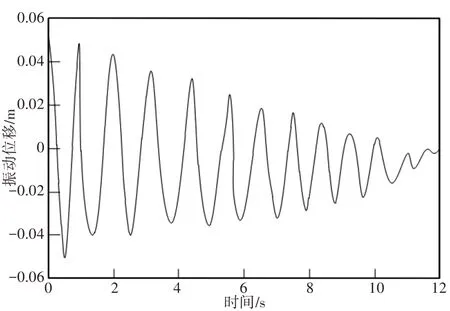
图4 乒乓发球机器人振动响应Fig.4 Vibration Response of Ping−Pong Serving Robo
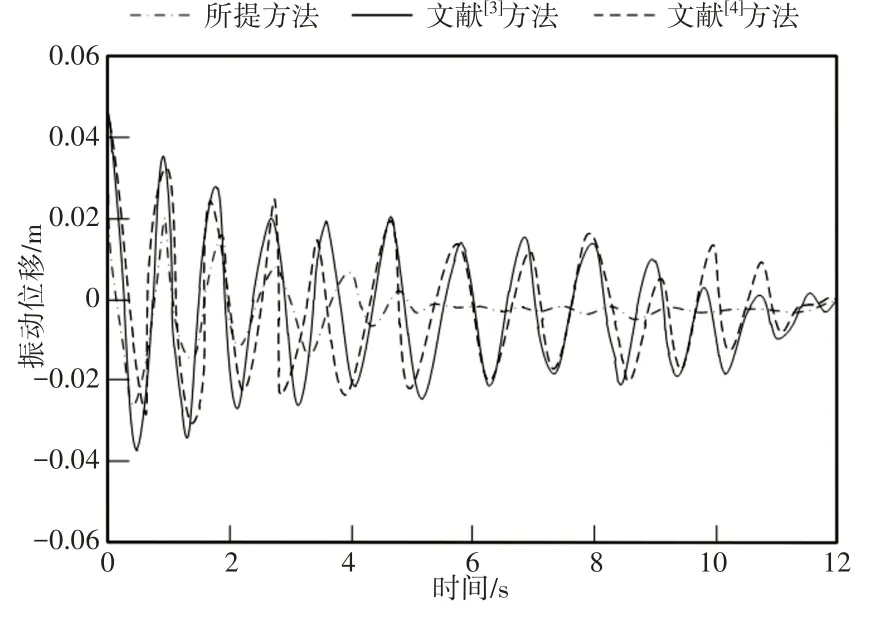
图5 振动控制结果Fig.5 Vibration Control Results
分析图5可知,采用文献[3]方法和文献[4]方法对机器人进行振动控制后,振动位移有所减小,但振动幅度还是较大,采用本文方法对机器人进行振动控制后,振动幅度明显变小,且在6s后振动基本为0。通过上述分析可知,这里方法可有效地实现乒乓机发球机器人的振动控制,因为这里方法对乒乓发球机器人的动力学进行了分析,在此基础上,设计控制器实现乒乓发球机器人的振动控制,提高了方法的控制效果。
采用所提方法、文献[3]方法和文献[4]方法对乒乓发球机器人进行振动控制,乒乓发球机器人的振动情况,如图6所示。三种方法的电压控制结果,如图7所示。
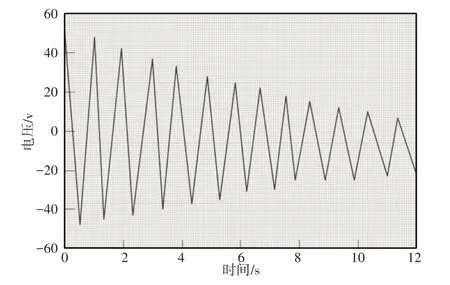
图6 电压波动情况Fig.6 Voltage Fluctuations
分析图7 可知,采用所提方法对乒乓发球机器人进行控制时,在4s时就能使电压保持平稳,不再发生变化,采用文献[3]方法和文献[4]方法对乒乓发球机器人进行控制时,将电压保持平稳的时间点分别为8s和7s,对上述方法的测试结果进行对比发现,所提方法可在短时间内实现乒乓发球机器人的控制,验证了所提方法具有较高的控制效率。
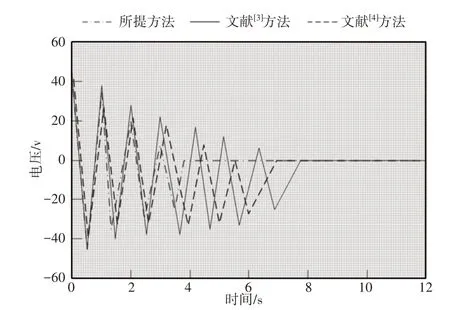
图7 电压控制结果Fig.7 Voltage Control Results
采用上述方法对乒乓发球机器人的关节角进行控制,对比不同方法的控制结果与期望结果,根据对比结果验证方法的控制性能,关节角控制结果,如图8所示。
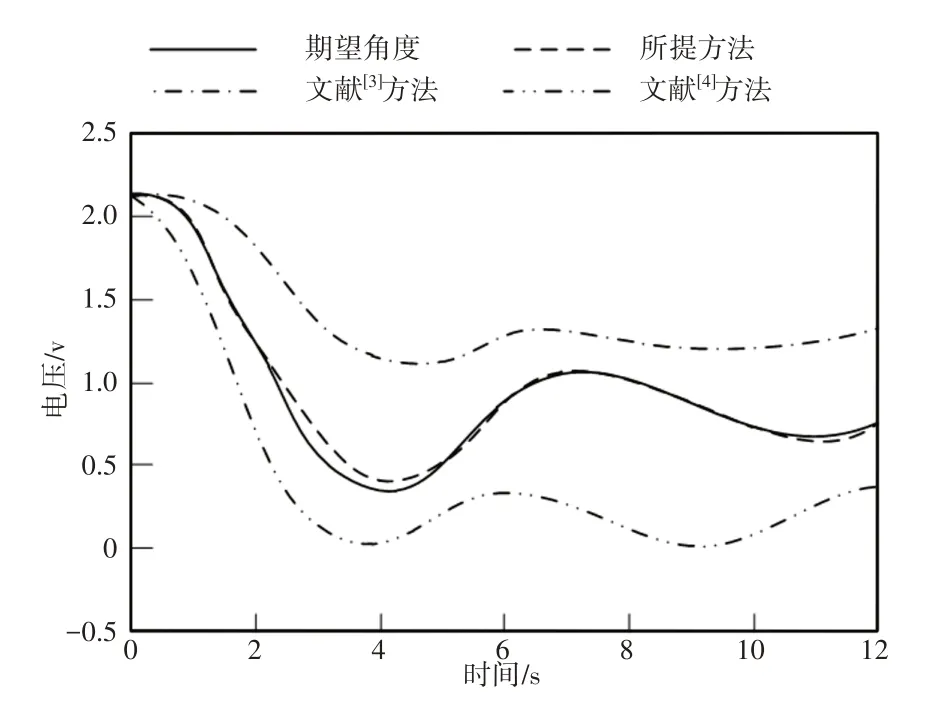
图8 关节角控制结果Fig.8 Joint Angle Control Results
由图8可知,采用所提方法对乒乓发球机器人的关节角进行控制时,获得的控制轨迹与期望轨迹基本相符,采用文献[3]方法对乒乓发球机器人的关节角进行控制时,获得的控制结果与期望轨迹相比偏大,采用文献[4]方法对乒乓发球机器人的关节角进行控制时,获得的控制结果与期望轨迹相比偏小,综上所属所提方法具有良好的控制性能。
5 结束语
乒乓发球机器人属于智能系统,包含视觉伺服、智能控制、机械系统、传感器技术和嵌入式控制等技术,乒乓球运动在我国非常普及,在生活服务方面和实践教学方面乒乓发球机器人可以产生良好的社会效应,乒乓发球机器人的振动情况直接影响着运动员的训练效果。目前乒乓发球机器人振动控制方法存在控制效果差和控制效率低的问题,提出乒乓发球机器人动力学分析与振动控制方法,首先分析了乒乓发球机器人的运动学理论,在此基础上对其振动进行控制,解决了传统方法中存在的问题,可提高训练效果。
猜你喜欢
大电机技术(2022年5期)2022-11-17
空气动力学学报(2022年4期)2022-08-23
黑龙江大学自然科学学报(2022年1期)2022-03-29
运动精品(2021年6期)2021-10-25
文体用品与科技(2021年2期)2021-02-04
天天爱科学(2020年6期)2020-09-10
疯狂英语·新读写(2020年3期)2020-06-06
船海工程(2015年4期)2016-01-05
浙江大学学报(工学版)(2015年2期)2015-05-30
火炸药学报(2014年1期)2014-03-20
