基于控制参数估计的再入滑翔目标智能轨迹预测算法
2023-02-11 13:07李明杰周池军雷虎民骆长鑫
系统工程与电子技术 2023年1期
李明杰, 周池军, 雷虎民, 邵 雷, 骆长鑫
(空军工程大学防空反导学院, 陕西 西安 710051)
0 引 言
再入滑翔目标是当前世界各国临近空间领域研究的重点。该类目标可在临近空间内进行远距离再入滑翔,具有飞行速度快、作战空域广、突防能力强等特点[1],现有防御系统对其尚不具备拦截能力。因此,发展针对该类目标的拦截技术具有重要的战略意义[2]。轨迹预测作为拦截技术的重要支撑,可以为基于预测命中点的拦截弹提供发射决策和中制导终端约束[3],是目前亟待突破的关键技术。
当前针对再入滑翔目标的轨迹预测方法还十分有限,按照其预测机理,主要分为机动模式辨识、攻击意图推断和控制参数估计3种类型。
在基于机动模式辨识的轨迹预测方面,Ferreira[4]及Chen等[5]对平衡滑翔的长周期运动进行了分析,并将跳跃滑翔利用刘维尔变换及广义多尺度理论方法拟合为震荡曲线,给出了跳跃次数的公式;Vinh等[6-7]分析了高超声速目标常攻角条件下的跳跃滑翔和平衡滑翔的二阶近似解,但解的方式较为复杂;Lu[8]将升力体飞行器的准平衡滑翔状态看作正则摄动问题,将准平衡滑翔纵向轨迹分解为平衡滑翔与高阶项的组合,并分析了真实解与低阶解的误差。韩春耀等[9]针对再入滑翔目标的平衡滑翔机动模式,分析了平衡滑翔模式的轨迹解析方程,通过对关键参数的求解实现了对平衡滑翔轨迹的预测;程云鹏等[10]通过分析目标机动模式,生成相应的训练集,训练支持向量机分类器并结合扩展卡尔曼滤波算法实现了目标的轨迹预测。以上方法仅针对部分模式具有较好的轨迹预测效果,而利用训练集或网络的训练方法缺乏一定的模型基础,可能会降低目标的预测精度。
攻击意图对于提高预测精度具有重要作用,在飞机的轨迹预测方面得到了广泛应用[11-12]。针对再入滑翔目标,张凯等[13]从构建预测模型、修正预测误差、辨识制导规律和推断目标意图4个方面讨论了再入滑翔目标轨迹预测的关键技术,提出了结合状态信息和攻击意图的轨迹预测思路。在此基础上[14],在假定目标必对要地进行攻击的前提下,基于贝叶斯理论推导目标机动模式,根据蒙特卡罗采样实现了轨迹预测;Hu等[15]利用自回归模型实现了机动规律辨识,同时利用目标意图结合贝叶斯理论推导了状态迭代公式,并可根据效果选择预测方式。以上方法结合意图信息对预测模型进行修正,有效地实现了轨迹预测,但由于使用了采样方法进行迭代预测,往往预测用时较长,难以满足轨迹快速预测的要求。
以上两类方法需要获取目标的机动模式或攻击意图等先验信息,在先验信息不准确的条件下预测效果欠佳。在此条件下,可以基于控制参数估计进行轨迹预测。翟岱亮等[16]基于目标气动受力模型,通过仿真分析得到了一组变化规律较为简单的控制参数,对于HTV-2模型具有较好的预测效果;李世杰等[17]针对文献[16]中参数规律不易预测的问题,提出了新的控制参数,通过仿真验证了预测的优化效果;韩春耀等[18]建立了再入滑翔目的简化动力学模型,在此基础上得到控制参数的解析形式,实现了轨迹预测。以上方法均对模型进行了有效分析,通过估计控制参数的变化规律,结合模型积分外推实现了轨迹预测,但预测方法缺乏与数据的关联,只通过简单的控制参数拟合,预测精度有限。
而随着深度学习技术的日益发展,利用深度网络进行复杂函数拟合具有十分良好的效果。特别地,循环神经网络网络及长短期记忆(long and short term memory, LSTM)网络[19],在时序特征提取与规律学习上具有很好的效果[20]。基于深度神经网络的轨迹预测方法也被广泛地应用于行人、飞机轨迹预测领域[21-22]。目前,也已有部分学者将时序网络应用于再入滑翔目标的轨迹预测领域。蔡远利等[23]设计了基于LSTM网络的弹道分类与预测器,实现了纯数据驱动非弹道目标的轨迹预测;Xie等[24]设计了一种基于双通道双向门循环单元(gate recurrent unit, GRU)网络,生成了预测数据集,实现了对高速目标的轨迹预测。以上方法的预测效果较好,但与模型的结合程度不高,且数据集缺乏滤波处理。
本文对再入目标运动模型及运动约束进行分析,提出了针对不同模式的快速轨迹生成方法,构建了轨迹数据集,并将控制参数与深度时序网络结合,建立了智能轨迹预测架构,通过修正末点位置和滤波参数,预测控制参数变化,结合模型积分外推,实现了轨迹预测。仿真结果表明,本文所设计的算法能够达到较高的预测精度,优于当前其他主流算法。
1 模型及参数分析
1.1 再入滑翔飞行器数学模型
在忽略地球自转影响的前提下,再入滑翔目标运动模型可表示为
(1)

(2)
1.2 控制参数模型
由于再入滑翔目标具有非合作性,防御方无法准确获知目标的模型参数。因此,无法事先将得知的相关参数合并,得到新的控制参数。在此基础上对控制参数进行估计,是轨迹预测的有效手段。

(3)
(4)
为便于分析,在论文后续部分将式(3)对应的运动模型表示为fξ,式(4)对应的运动模型表示为fK。
1.3 常见机动模式及控制方程
通常条件下,再入滑翔目标存在多种机动模式,主要包括平衡滑翔、跳跃滑翔、摆动机动和转弯机动等典型机动模式,各机动模式的定义及控制方程可参考文献[25-26]。
2 机动模式轨迹生成方法
为了给后续的智能轨迹预测算法提供有效轨迹数据,本节提出了快速轨迹生成方法,生成了大量机动模式轨迹,构建了轨迹数据集。
2.1 攻角剖面模型
由于再入滑翔目标初始速度较高,所以其在初始阶段往往使用大攻角飞行,从而减小目标热流密度以满足约束。而目标为了达到最大射程,往往需要采用最大升阻比进行滑翔。基于此,本文采用航天飞机常使用的攻角模型[27],用于纵向跳跃滑翔的轨迹生成:
(5)
式中:αK表示最大升阻比对应的攻角值;v1,v2分别为目标用最大升阻比飞行时超出约束与未超出约束的速度极值点。
2.2 机动轨迹生成流程
各模式机动轨迹的生成流程如图1所示。在轨迹生成过程中,首先根据不同机动模式选取相应的控制方程,然后给定初始状态和控制量初值,根据控制方程及攻角走廊[20]计算相应时刻的控制量,通过积分获得轨迹。
2.3 轨迹生成效果
本文以高性能机动再入飞行器(high performance maneuvering reentry vehicle, HPMARV)[28]为研究对象,在给定初始与终止状态的条件下,变更初始参数,生成多种机动轨迹,如图2和图3所示。其中,图2为摆动跳跃轨迹,图3为转弯平衡轨迹,其对应参数如表1所示。图2和图3中a,b,c表示不同初始参数条件下的生成轨迹。从图2与图3可以看出,轨迹均可实现预设的横纵向机动,且满足相应的攻角走廊约束。单条轨迹的生成时间约为2~3 s,可满足大量训练轨迹的生成要求。
图1 轨迹数据快速生成流程Fig.1 Rapid generation process of trajectory data

图2 摆动跳跃机动轨迹及攻角变化Fig.2 Weaving skip maneuvering trajectories and variation of attack angle
图3 转弯平衡机动轨迹及攻角变化Fig.3 Turning equilibrium maneuvering trajectories and variation of attack angle

表1 仿真参数设置
2.4 控制参数变化规律分析
为实现对再入滑翔目标的准确预测,需要分析其控制参数的变化规律。转弯跳跃机动模式下多条轨迹的控制参数变化规律如图4和图5所示。当目标机动较为复杂时,由于控制参数与运动状态具有复杂的非线性关系,所以无法通过简单函数拟合各控制参数的变化规律,实现准确的轨迹预测;另一方面,在同一机动模式下,不同轨迹的控制参数的变化规律具有一定相似性,所以可以利用时序网络,通过学习控制参数的时序特点进行轨迹预测。
3 基于控制参数的智能轨迹预测算法
3.1 LSTM网络
LSTM网络是为了解决长期的时序问题而专门设计的,不同于普通的循环神经网络结构,其只有一个简单的tanh函数,一个LSTM网络结构单元包含3个门结构:遗忘门、输入门和输出门,以实现信息的保护控制,其结构如图6所示。

图4 转弯跳跃模式下KD,β,KL的变化规律Fig.4 Variation law of KD,β,KL in turning skip mode
图5 转弯跳跃模式下ξv,ξt,ξc 参数的变化规律Fig.5 Variation law of ξv,ξt,ξc in turning skip mode
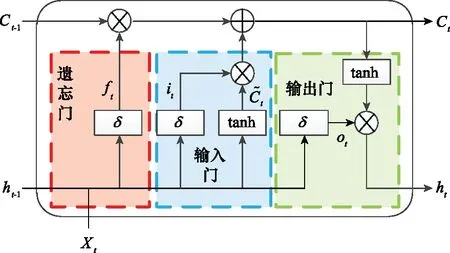
图6 LSTM网络结构Fig.6 Structure of LSTM network

3.2 预测框架
本文设计的智能轨迹预测框架如图7所示,包括末点修正网络、参数修正网络及预测网络三部分。

图7 基于控制参数的智能轨迹预测算法结构Fig.7 Structure of intelligent trajectory prediction algorithm based on control parameters
(1) 末点修正网络φl(·)
利用积分预测轨迹时,积分初始状态对预测精度有很大的影响。将原始数据及观测数据代入末点修正网络,用于精确修正观测末点位置。网络使用大小为[6,128,2]的LSTM网络及[128,6]的全连接网络进行训练。即将观测到的归一化6维状态序列So(ts:tl)代入到具有2层128中间节点的LSTM网络学习其时序关系,之后代入全连接网络进行降维,用于得到修正末点状态Sl。
(2) 参数修正网络φm(·)
(3) 参数预测网络φp(·)

3.3 预测流程
(1) 数据归一化
首先对轨迹进行跟踪,获取相应的跟踪数据。在跟踪数据的基础上,利用滤波算法对数据进行处理得到滤波数据。为了加快网络收敛速度,本文将观测数据及滤波数据进行归一化处理,即利用所有轨迹的原始数据获取各类数据的上、下限值Xmax,Xmin,将数据归一化处理
(6)
通过此操作,将数据转化为[0,1]之间,方便网络进行训练。
(2) 末点位置修正
(7)
(3) 参数修正与预测
Kp=φp(φm(Kf(ts),…,Kf(tl)))=
(8)
ξp=φp(φm(ξf(ts),…,ξf(tl)))=
(9)
式中:Kp与ξp分别表示两种控制参数的预测结果;t1表示预测初始时刻;tn表示预测终止时刻。
(4) 积分外推预测
根据运动模型fK及fξ,使用四阶龙格库塔法积分获取预测轨迹Spk及Spξ:
SpK=fK(KP,Sml)=[HpK(t1:tn),φpK(t1:tn),
(10)
Spξ=fξ(ξP,Sml)=[Hpξ(t1:tn),φpξ(t1:tn),
(11)
3.4 损失函数计算
上述网络均使用均方根误差(root-mean-square error, RMSE)计算网络损失,网络结构总损失为
l=lfm+lm+lp
(12)
式中:lfm表示末点修正网络损失;lm表示修正网络损失;lp表示预测网络损失,形式如下:
(13)
式中:Smli表示批次中第i个修正末点位置;Soli表示批次中第i个观点末点位置;N表示批次数目;Kmi表示批次中第i个修正控制参数序列;Kfi表示批次中第i个滤波控制参数序列;Kpi表示批次中第i个修正控制参数序列;Kdi表示批次中第i个生成控制参数序列。
4 仿真验证
4.1 样本设置及参数设置
(1) 仿真条件
本文仿真分析采用Matlab+Python的软件环境,网络搭建使用Pytorch框架,硬件配置为Inter i7处理器和Geforce 2080ti显卡。
(2) 数据集设置
本文使用第2节的轨迹生成方法,生成数量为20 000条的轨迹数据集。对轨迹进行滤波处理[29],雷达位置为(0.4 rad,0 rad,100 m)。假设雷达的观测误差符合[(30 m)2,(0.1°)2,(0.1°)2]的高斯分布,将所有轨迹的400~600 s数据生成观测数据集及滤波数据集,以其400~750 s的原始数据作为相应网络的标签,用于训练和测试末点修正网络、参数修正网络及参数预测网络。
(3) 训练条件
各网络以100条轨迹为1个批次,共训练1 000个回合。优化器使用自适应矩估计(adaptive moment estimation, ADAM)优化器,训练学习率在前10个回合为0.001,之后调整为0.000 1。
(4) 误差定义
本文选取预测的平均误差(average error of spatial distance, AESD)、最终误差(final error of spatial distance, FESD)以及最大误差(maximal error of spatial distance, MESD)作为误差指标,计算公式如下:
AESD=
(14)
FESD=
(15)
MESD=
(16)
4.2 实验结果展示及对比
后续将基于控制参数ξv,ξt,ξc及KD,β,KL的智能轨迹预测算法分别称为LSTM-VTC与LSTM-DBL算法。
(1) 末点修正效果
使用控制参数进行积分外推,虽然可以有效减少预测状态量并简化预测模型,但其对积分状态的起点精度要求很高,如果滤波结束后末点位置与真实位置差距较大,尤其是角度差距较大(例如平衡滑翔和纵向小机动滑翔轨迹,θ接近于0),会使倾角符号发生改变,从而导致轨迹预测产生很大的误差。在研究过程中,使用末点修正网络对滤波结果的末点状态进行修正,其积分效果对比如图8所示。
从图8可以看出,当末点位置不进行修正时,由于角度误差较大,导致轨迹积分发生了较大的偏差。尤其是在高度方向上,由于初始倾角的偏差导致了方向的错误,再加上目标速度很大,导致轨迹产生很大的误差。经过末点修正,尽管初始点位置仍有误差,但是因为减少了角度误差,使得预测得到的轨迹保持了正确的趋势,误差整体较小。
(2) 参数修正效果
由于滤波参数与原始参数存在一定的误差且存在波动,为了提高轨迹预测的最终效果,对其进行进一步修正是十分必要的。以转弯跳跃机动条件下的轨迹预测为例,滤波结果、修正结果与原始数据的对比效果如图9和图10所示。
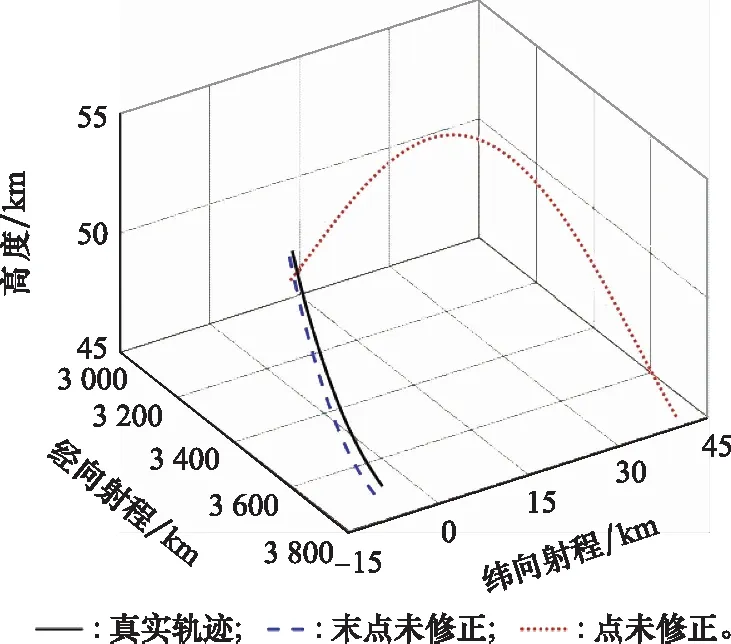
图8 末点修正网络结果Fig.8 Result of last point modification network

图9 KD,β,KL参数滤波及修正结果Fig.9 Filtering and modification result of parameters KD,β,KL
图10 ξv,ξt,ξc参数滤波及修正结果Fig.10 Filtering and modification result of parameters ξv,ξt,ξc
图9和图10分别代表控制参数为KD,β,KL与ξv,ξt,ξc的参数修正与相应预测效果。从图中可以看出,尽管进行了滤波处理,但是由于预测时时间步长较大,两组控制参数都存在较大波动,距离原始控制参数有较大偏差。为了提高目标预测精度,引入了对滤波控制参数进行修正的参数修正网络,网络处理后控制参数更加准确,说明训练后的网络可以在大量数据中通过学习拟合出目标滤波参数与生成参数的映射关系;另一方面,因为滤波数据本身存在抖动,所以修正参数在前期仍然存在一定的波动现象。
有无滤波参数网络各模式下的预测效果如图11和表2所示。图11依次表示摆动跳跃、摆动平衡、转弯跳跃及转弯平衡机动的预测指标变化。AESD,FESD,MESD表示具有修正网络的预测误差值,AESDf,FESDf,MESDf表示没有修正网络的预测误差值。从图11可以看出,针对两组控制参数,使用滤波网络后其整体预测结果都有很大提升。部分条件下,由于积分初始位置不准确,可能存在滤波参数在短时域条件下预测精度更高的情况。对比表2结果,两组控制参数算法针对平衡机动的预测效果均好于跳跃机动,这是因为平衡机动的参数变化更加平滑;摆动机动的预测效果好于转弯机动,这是因为摆动机动的横向运动范围相较于跳跃机动更小,更易预测;对比两组控制参数的预测效果,KD,β,KL的预测效果要比ξv,ξt,ξc更精确。结合文献[16]分析,说明该控制参数更能体现目标的横纵向轨迹预测效果。
图11 有无滤波参数修正网络结果对比图Fig.11 Comparison result with or without filtering parameters modification network

表2 有无修正网络150 s预测误差
(3) 预测误差分析
根据两种参数的预测方法效果绘制相应的预测误差管道,如图12和图13所示。从图12和图13可以看出,各机动模式下,随着预测时间增加,误差管道逐渐变宽。尤其在转弯跳跃机动模式下,其管道的横纵向扩张相较于其他机动模式都更加迅速。这主要有两个方面的原因:一是复杂机动下控制参数变化规律更加非线性化,网络辨识参数的误差更大;二是由于复杂机动下预测轨迹的初始积分位置不准确,导致误差的累积效应更加剧烈,预测误差范围逐渐增大。
(4) 气动误差影响分析
再入滑翔目标在临近空间滑翔时,由于大气误差和随机风的影响,大气密度可能存在摄动。而通常条件下,当再入滑翔目标高度大于50 km时,大气密度几乎不变;当高度等于30 km时,大约存在不超过3%的偏差[30]。以此,本文在目标轨迹生成时给大气密度增加3σ置信区域为3%的随机误差。在4种机动模式下,目标的预测效果如图14及图15所示。
图12 LSTM-DBL误差管道Fig.12 Error pipe of LSTM-DBL
图13 LSTM-VTC误差管道Fig.13 Error pipe of LSTM-VTC
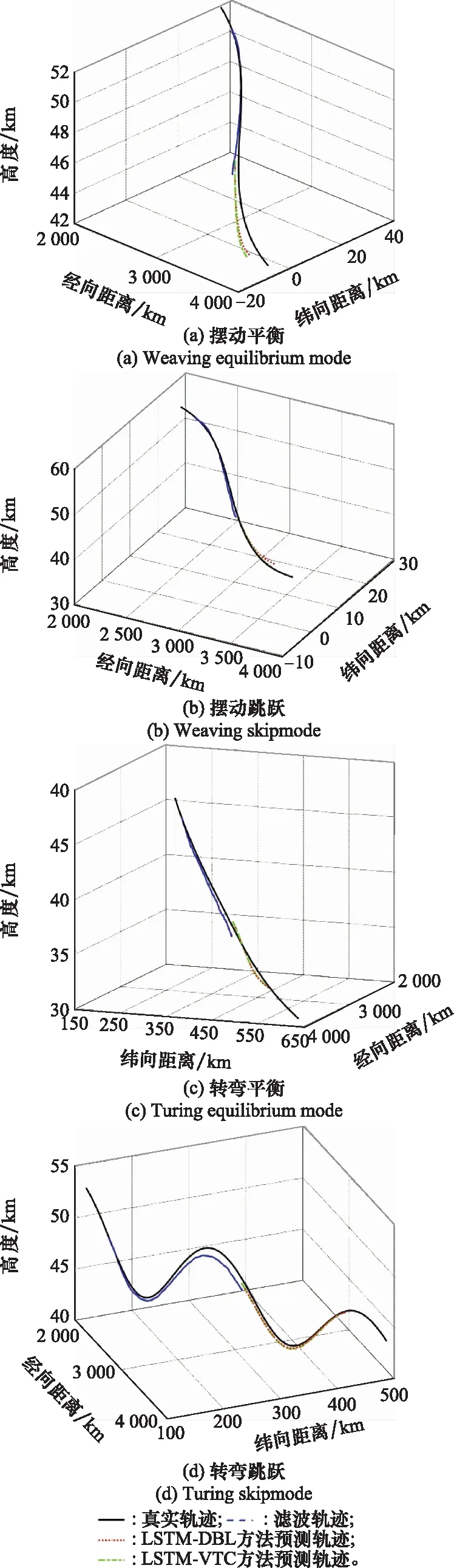
图14 大气密度误差下各机动模式预测轨迹Fig.14 Predicted trajectories in different maneuvering modes with atmospheric density error
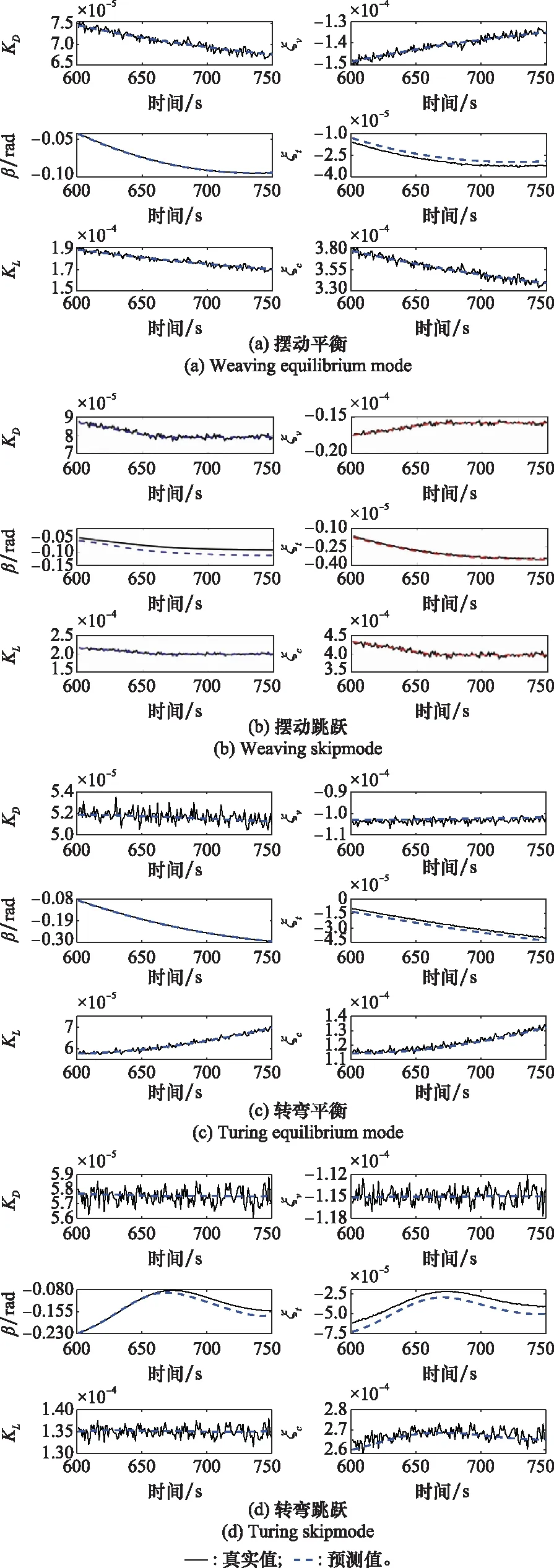
图15 大气密度误差下控制参数预测效果Fig.15 Prediction results of control parameters with atmospheric density error
从图15可以看出,尽管大气误差及随机风扰动会给目标的控制参数带来扰动,但是本文提出的两种方法均可以估计扰动下的控制参数的变化规律,并对轨迹进行有效预测。另一方面,对平衡滑翔轨迹进行预测时,由于大气扰动导致目标初始位置预测产生误差,会使目标在纵向不再完全符合平衡滑翔条件,使得预测轨迹在纵向产生一定的跳跃,从而在一定程度上影响预测精度。
(5) 与主流方法对比效果
将本文方法与文献[17]中KD,β,KL参数函数拟合方法、文献[16]ξv,ξt,ξc中参数函数拟合方法及单纯的LSTM网络预测轨迹进行对比,各类轨迹的预测效果如图16所示。
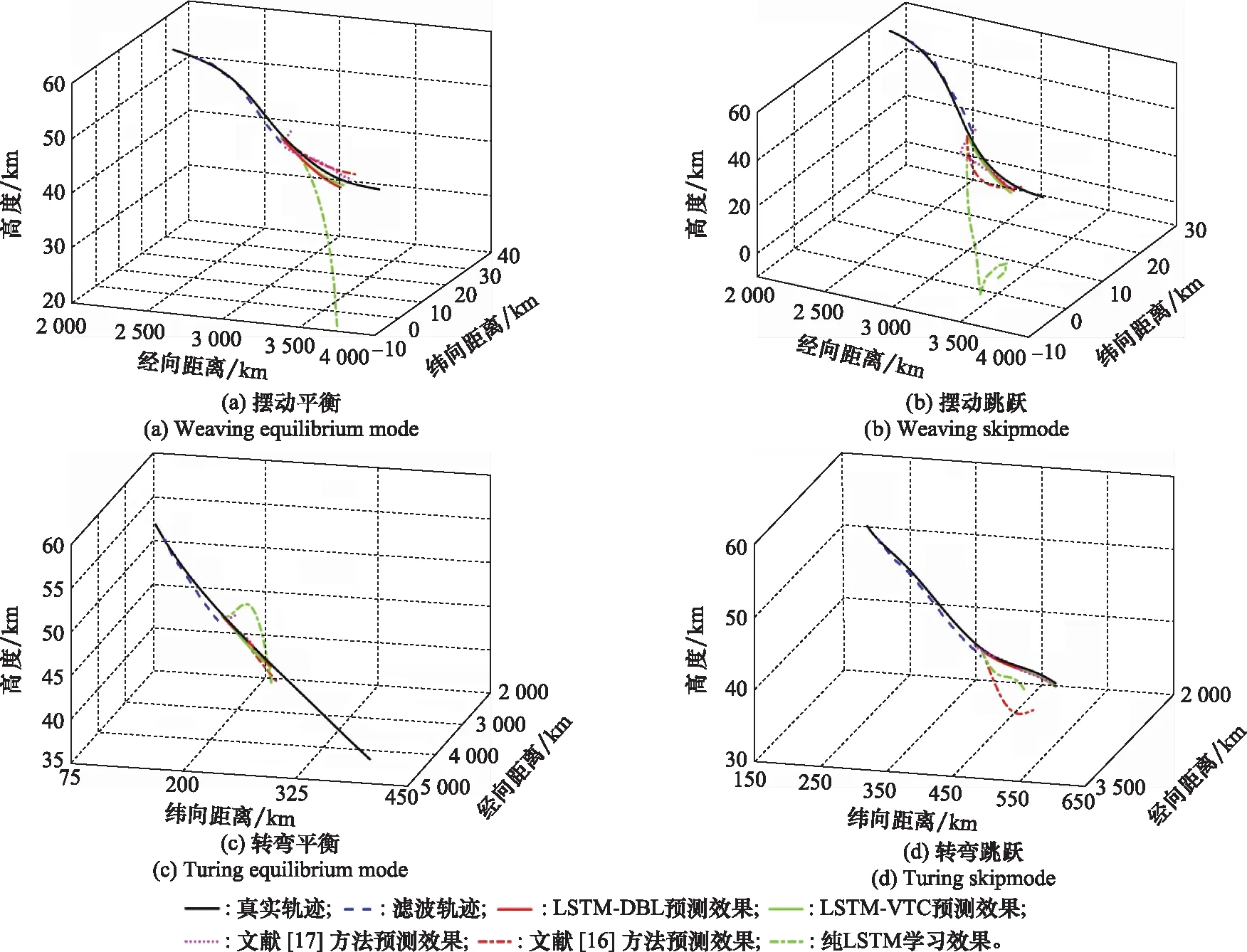
图16 各机动模式下轨迹预测效果Fig.16 Trajectoris prediction results with different maneuvering modes
从图16可以看出,本文提出的LSTM-DBL及LSTM-VTC方法与纯LSTM网络相比,误差更小、预测精度更高。这是因为纯LSTM网络方法,没有对目标模型进行分析,每个时刻的预测状态量之间仅通过网络建立了时序关系,缺乏与运动模型的耦合;而通过对比发现文献[16]和文献[17]方法的预测偏差较大,表明预测时段的控制参数变化并不遵从简单的函数规律,直接对滤波参数进行拟合,对模型机动变化产生了误判,从而导致预测结果不准确。
各预测算法的精度及速度对比结果如表3所示。由表3可知,本文提出的LSTM-DBL算法在多种机动模式下的预测精度均为最高,各模式下的AESD不超过1.4 km,最大距离误差不超过2.5 km。通过分析网络用时,纯LSTM网络相较于LSTM-DBL方法速度更快。

表3 不同预测方法对比结果

续表3
5 结 论
本文针对各机动模式下控制参数变化规律的复杂性,提出了基于控制参数的再入滑翔目标智能轨迹预测算法。首先利用攻角走廊设计了快速轨迹生成方法,构建了轨迹数据集;借助LSTM时序网络,设计了精确末点位置的末点修正网络,修正了滤波参数的参数修正网络及预测参数变化的预测网络,共同构成智能轨迹预测框架,结合目标控制参数运动模型积分外推实现了轨迹预测。仿真结果表明,在单次预测用时不超过0.015 6 s的条件下,各模式轨迹预测的平均误差不超过1.4 km,最大误差不超过2.5 km;在大气偏差条件下,通过仿真分析,验证了该方法针对各类机动均具有一定的鲁棒性。
猜你喜欢
军民两用技术与产品(2021年7期)2021-10-13
北京航空航天大学学报(2020年3期)2021-01-14
装备制造技术(2020年3期)2020-12-25
当代陕西(2019年12期)2019-07-12
汉语世界(The World of Chinese)(2019年1期)2019-03-18
科学与财富(2017年15期)2017-06-03
科技创新与应用(2017年1期)2017-05-11
科技与创新(2017年3期)2017-03-17
百科探秘·航空航天(2015年10期)2015-11-07
城市建设理论研究(2014年11期)2014-04-21