
基于三轴运动模组的具有避障和等待位的运动控制方法
2023-02-24 05:20贺长林徐其航
机电工程技术 2023年1期
贺长林,殷 杰,徐其航
(1.中电鹏程智能装备有限公司,南京 210008;2.邵东智能制造技术研究院有限公司,湖南邵阳 422213;3.揭阳职业技术学院 机电工程系,广东揭阳 522051)
0 引言
随着工厂人力成本的增加,生产自动化成为了一个不可逆的趋势。在自动化装配生产线上,取料、避障、放料等是非常常见的应用场景。在实现具有取料、放料,以及避障等动作的运动控制中,如果对成本没有要求的,一般采用机器人来实现[1-3]。采用机器人的解决方案,方案简单,操作方便,只需要按照固定的轨迹点进行示教,机器人内部会自动生成相应的运动轨迹,而且机器人具有自动平滑运动轨迹功能,所以机器人在避障点附近可以平滑地经过避障点,通过采用平滑功能,可以大大提升效率;但是由于机器人对安装的空间要求比较大,所以才有机器人方案,设备的体积会变大,另一方面,由于机器人在箱取料位或者放料位运动时,没有改变目标位置的功能,机器人只能按照既定的轨迹,固定的速度曲线来运动,所以需要在取料等待位或者放料等待位做减速运动并停止,然后才能去取料或者放料,这样不利于提升效率。如果对成本比较敏感,一般会采用三轴的机械手来实现,采用三轴机械手,由于在取料位和放料位分别有等待位,在这两个点有停顿,会有相应的加减速,从而影响效率[4-6];由于存在避障点,所以三轴机械手不能做到三轴联动,导致采用三轴机械手的效率更慢[7-9]。采用本文技术方案,可以让三轴机械手高效地实现取料和放料的动作,能实现像机器人的运动轨迹平滑功能,和机器人的解决方案相比,该技术方案成本更低,对安装位置要求更低,实现方法更简单,设计的柔性更高。
1 三轴运动模组机械结构
三轴机械手如图1所示,图示的结构中包含了XYZ三个坐标轴,还有一个障碍物,一个取料位,既是轨迹点去取料位把标签吸附到轨迹点上,一个放料位,既是轨迹点把从取料位吸附的标签按照设定的轨迹运动到放料位,然后贴到放料位上。

图1 三轴机械手结构
取料时,需要达到一定的条件,料已经在取料点时,轨迹点才能去取料;同理,放料时,需要达到一定的条件,轨迹点才能允许去放料点,所以需要有一个取料等待位和放料等待位。同时由于有障碍物存在,还需要有一个避障点。由于取料点和放料点有一定的位置精度要求,所以去取料点和放料点的位置时,运动轨迹必须是直线;同时更好地取料和放料,离开取料点和放料点时,运动轨迹必须也要是直线。
本文设计的技术方案,不限于只有两个等待位或者一个避障点,对于多个等待位和多个避障点都适用。为了方便描述本文的技术方案,采用两个等待位和一个避障点的情况进行说明。
2 运动控制分析
2.1 三轴模组从取料位到放料位轨迹分析
如图2和图3所示,为轨迹点从取料位到放料位的轨迹,由于从取料点出发时,必须要走直线,所以从取料点开始运动后,只有X轴动作,Y轴和Z轴停止,当X轴运动到某一个能避开障碍物的地方,Y轴和Z轴开始动作,这种运动方式比等X轴到位后,Y轴和Z轴再开始运动,效率更高,运动时间更短;由于Y轴和Z轴开始动作是根据X轴运动到某一个固定的点来确定的,所以从取料点到放料等待点的轨迹是固定的,就能保证轨迹点不会碰到障碍物。当X轴到达最远距离后,Y轴和Z轴再运行一段时间后也会停止,当Y轴和Z轴到达放料等待位后,X轴再开始向放料等待位运动,X轴的运动过程分两种情况,在X轴往放料等待位运动过程中,如果在X轴开始减速前,放料的条件能够达到,允许放料后,利用伺服电机的目标位置更改并且立即生效的功能,在经过放料等待位时不需要减速,直接到达放料位置;第二种情况,当X轴开始减速后,放料的条件才达到,这种情况下,X轴在放料等待位减速到0后,且放料条件达到后,X轴再开始运动到放料位置。
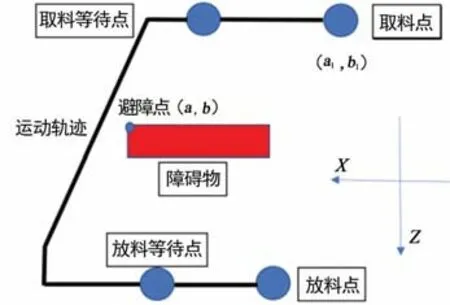
图2 从取料点到放料点运动轨迹(a基于X-Z坐标)
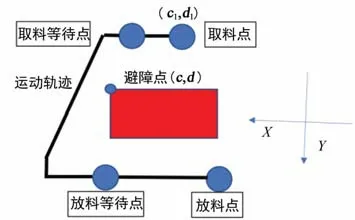
图3 从取料点到放料点运动轨迹(b基于X-Y坐标)
2.2 去放料位Y-Z轴启动点分析
为了能准确确定Y轴和Z轴开始运动时,X轴的坐标值,从两个坐标系内分别计算出这个X轴坐标的最小值,然后从这两个最小值中选一个比较大的值,即是需要计算的值。首先需要找到避障点,即是运动轨迹只需要避开这个点,就能达到避障的目的,在X-Z坐标系内,找到障碍物中X轴的最大数值,同时也找到Z轴坐标最大的数据,这两个数值组成的坐标点就是避障点。
如图所示,障碍物的左上角即是要找的避障点,根据这个可以计算出在X-Z坐标系内的Y轴和Z轴开始动作X轴的坐标X1,X1≥a-v2×(T1+2×(b1-b))/2v1,其中v2为X轴最高速度,T1为Z轴加速时间,v1为Z轴最高速度,而且假定X轴和Z轴的加速时间比运动时间要短很多;同理也可以计算出基于X-Y轴坐标系内Y轴和Z轴开始动作X轴的坐标X2,X2≥c-v2×(T1+2×(d1-d))/2v1,其中v2为X轴最高速度,T1为Z轴加速时间,v1为Z轴最高速度。如果X1>X2,X1就是需要的X轴坐标值;如果X1<X2,X2就是需要的X坐标值。
2.3 从取料位到放料位速度分析
从取料点到放料点,Y轴和Z轴都只是从取料等待位到放料等待位,只有两个位置点,而且从放料点开始运动之后的一段时间内,以及轨迹点从放料等待位到放料运动过程中,这两个节点,Y轴和Z轴都必须是静止的,所以不论放料条件是否及时成立,Y轴和Z轴的速度曲线都是一样的,所以不讨论Y轴和Z轴的速度曲线,只讨论X轴速度曲线。由图4可以看到,当放料条件没有及时满足时,X轴会多一次加减速过程,这时速度曲线和传统的三轴模组控制方案的速度曲线是一致的,当放料条件及时满足时,X轴会减少一次加减速过程,这样就可以提升运动效率。
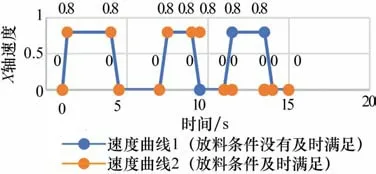
图4 X轴从取料点到放料点速度曲线
当放料条件能及时达到,轨迹点能平滑地从取料位运动到放料位,大大提升运动效率,减少运动节拍时间,同时还能减少运动机构加减速次数,减少运动机构由于加减速带来的磨损;且不会和障碍物干涉。
当放料条件没有能及时达到,轨迹点会在放料等待位进行等待,不会直接去放料等待位,利用伺服电机的目标位置连续更改且立即生效的功能[10-11],可以实现两种情况都能达到使用要求。
2.4 三轴模组从放料位回取料位轨迹分析
如图5和图6所示,轨迹点从放料点返回取料点,由于从放料点出发时,必须要走直线,所以从放料点开始运动后,只有X轴动作,Y轴和Z轴停止,当X轴运动到某一个能避开障碍物的地方,Y轴和Z轴开始动作,这种运动方式,比等X轴到位后,Y轴和Z轴再开始运动,这样的效率更高,运动时间更短;由于Y轴和Z轴开始动作是根据X轴运动到某一个固定的点来确定的,所以从放料点到取料等待点的轨迹是固定的,就能保证轨迹点不会碰到障碍物。当X轴到达最远距离后,Y轴和Z轴再运动一段时间后也会停止,当Y轴和Z轴到达取料等待位后,X轴再开始向取料等待位运动,X轴的运动过程分两种情况,当X轴运动到取料等待位过程中,如果在X轴开始减速前,取料的条件能够达到,允许取料后,利用伺服电机的目标位置更改并且立即生效的功能,在经过取料等待位时不需要减速,直接到达取料位置;第二种情况,当X轴开始减速后,取料的条件才达到,这种情况下,X轴在取料等待位减速到0后,且取料条件达到后,X轴再开始运动到取料位置。
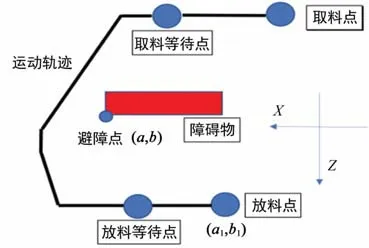
图5 从放料点到取料点运动轨迹(a基于X-Z坐标)

图6 从放料点到取料点运动轨迹(b基于X-Y坐标)
回取料位Y-Z轴启动点分析如下。
由于回取料位的轨迹和去放料位轨迹是一个类似的运动控制,根据2.2节分析原理,可以得到在X-Z坐标系内的Y轴和Z轴开始动作X轴的坐标X1,X1≥a-v2×(T1+2×(b-b1))/2v1,其中v2为X轴最高速度,T1为Z轴加速时间,v1为Z轴最高速度,而且假定X轴和Z轴的加速时间比运动时间要短很多;同理也可以计算出基于X-Y轴坐标系内Y轴和Z轴开始动作X轴的坐标X2,X2≥c-v2×(T1+2×(d-d1))/2v1,其中v2为X轴最高速度,T1为Z轴加速时间,v1为Z轴最高速度。X1和X2中比较大的那个值即为Z和Y轴开始启动X轴的坐标。
2.5 三轴模组从放料位回取料位速度分析
从放料点回到取料点的速度分析,与从取料点到放料点的情况类似,类似的分析并结合图7可以得到,当取料条件及时满足时,X轴会减少一次加减速过程,这样就可以提升运动效率。

图7 X轴从取料点到放料点速度曲线
当取料条件能及时达到,轨迹点能平滑地从放料位运动到取料位,大大提升运动效率,减少运动节拍时间,同时还能减少运动机构加减速次数,减少运动机构由于加减速带来的磨损;且不会和障碍物干涉。
当取料条件没有能及时达到,轨迹点会在取料等待位进行等待,不会直接去取料等待位,利用伺服电机的目标位置连续更改且立即生效的功能,可以实现两种情况都能达到使用要求。
从取料位到放料位的轨迹和从放料位到取料位的轨迹不一样,取料条件有没有及时成立,但是从取料位到放料位的轨迹都是一样的,都是固定的,只不过,当取料条件没有及时成立,轨迹点会在接近取料等待位进行减速,并减速到0,等取料条件成立后,再去取料。当取料条件及时成立,轨迹点不会在取料等待位进行减速,而是直接去取料。同理,当放料条件有没有及时成立,但是从放料位到取料位的轨迹都是一样的,当放料条件没有及时成立,轨迹点会在接近放料等待位进行减速,并减速到0,等放料条件成立后,再去放料。当放料条件及时成立,轨迹点不会再放料等待位进行减速,而是直接去放料。
3 应用效果分析
采用本文涉及的技术方案用到电表自动装铭牌的设备上,相比采用普通的三轴运动控制方法,可以使设备节拍从8 s减少到4.5 s,比传统的三轴运动模组控制方法效率提升了43%。
4 结束语
本文为具有取料、放料、避障等功能的运动控制场景,提供了一种全新的解决方案。采用三轴运动控制模组的机械结构,结合本文的运动控制方法,比传统的技术方案成本低,效率高。相比于多轴机械手,本文涉及的技术方案成本更低,更容易安装。相比于普通的三轴机械臂运动控制方案,本文设计的技术方案能大大提升效率,能大大减少节拍时间;同时还能实现三轴联动,且运动轨迹是固定不变的,保证轨迹点不会和障碍物干涉;面对取料和放料条件能否及时达到的多种情况时,都能按照固定的轨迹来达到设定的工艺要求;当取料条件或者时放料条件能及时达到,利用伺服电机中的设定位置实时更改,且立即生效的功能,来实现在取料等待点或者放料等待位不进行减速停止,而是高速通过等待位,直接去放料或者取料位,这样能大大提高效率,而且还能减少伺服电机的加减速次数来减少机械冲击。
猜你喜欢
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
创新作文(1-2年级)(2019年4期)2019-10-15
电子制作(2019年12期)2019-07-16
制造技术与机床(2018年11期)2018-11-23
中国交通信息化(2018年5期)2018-08-21
电子制作(2018年8期)2018-06-26
河北农机(2017年12期)2018-01-20
制造技术与机床(2017年4期)2017-06-22
通信电源技术(2016年1期)2016-04-16
