
机器人辅助腹腔镜改良非乳头Lich-Gregoir输尿管膀胱再植术治疗梗阻型巨输尿管*
2023-02-24 05:23何玉锋陈江龙汤坤彬徐新茹
中国微创外科杂志 2023年2期
林 珊 何玉锋 陈江龙 汤坤彬 徐新茹 徐 迪
(福建省立医院小儿外科 福建医科大学省立临床医学院,福州 350001)
产前超声检查在巨输尿管的早期诊断中具有重要价值,孕30周超声检测胎儿盆段输尿管直径≥7 mm即为异常表现[1]。美国儿科协会按照病因不同将巨输尿管分为梗阻型、反流型、非梗阻非反流型、梗阻伴反流型等[2]。对于原发性梗阻型巨输尿管(primary obstructive megaureter,POM),最重要的治疗目标是解除尿路梗阻,保护肾功能。开放手术行输尿管裁剪、输尿管膀胱再植是治疗先天性梗阻型巨输尿管的标准术式。2006年Kutikov等[3]报道腹腔镜输尿管膀胱再植术,随后腹腔镜输尿管膀胱再植术的多种术式陆续报道,包括各种膀胱内和膀胱外的术式,其中腹腔镜Lich-Gregoir术是膀胱外治疗膀胱输尿管反流(vesicoureteral reflux,VUR)的经典术式,经过一定的技术改良,该术式也应用于治疗POM。随着机器人手术系统的临床使用,改良的机器人辅助腹腔镜Lich-Gregoir术治疗POM已有少量报道,但具体改良方式的介绍较少。2021年2~12月,我们对12例POM行机器人辅助腹腔镜改良非乳头Lich-Gregoir输尿管膀胱再植术,随访12个月以上,效果满意,报道如下。
1 临床资料与方法
1.1 一般资料
本组12例,男7例,女5例。年龄8~60(34.2±24.9)月。发热伴尿路感染2例,间歇性腹痛4例,另6例产前发现输尿管扩张伴肾积水,生后定期随诊,肾积水及输尿管扩张逐渐加重,肾功能减退,出生后3年内手术。术前均行泌尿系统超声检查提示肾积水伴输尿管扩张。磁共振泌尿系统成像(magnetic resonance urography,MRU)检查证实输尿管膀胱交界处梗阻(图A),并排除如输尿管异位开口、神经源性膀胱、后尿道瓣膜或尿道狭窄等原因引起的继发性巨输尿管。利尿肾图提示患侧肾尿液排泄曲线呈机械性梗阻,曲线类型Ⅳ型9例,Ⅲ型3例。肾静态显像(99mTc-DMSA)提示患侧肾分肾功能下降,分肾功能<35% 9例,35%≤分肾功能<40% 3例;排泄性膀胱尿路造影(voiding cystourethrography,VCUG)检查有无合并膀胱输尿管反流,其中梗阻型9例,梗阻伴反流型3例。详见表1。
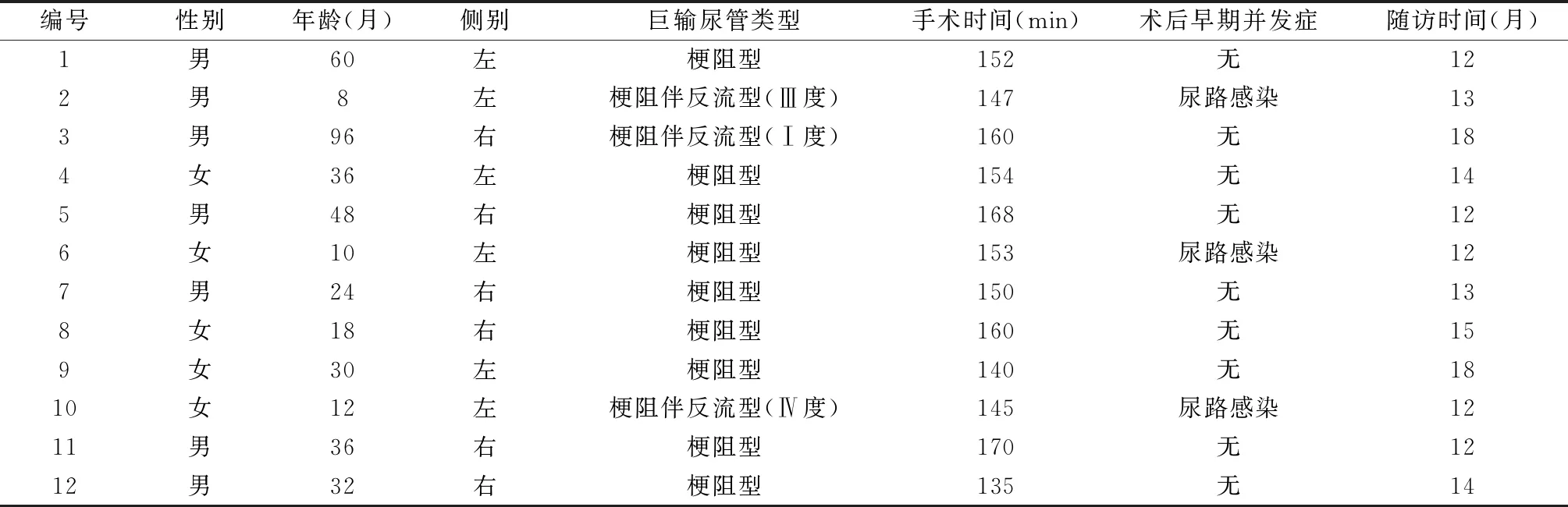
表1 12例巨输尿管手术资料
根据英国小儿泌尿外科医师协会(British Association Pediatric Urologists,BPAU)指南[4]确定纳入标准:①结合病史、体检和术前彩超、MRU、利尿肾图、99mTc-DMSA、VCUG诊断为POM;②保守治疗失败,如出现腹痛、尿路感染等临床症状;③无症状患儿,99mTc-DMSA提示分肾功能<40%,伴有巨大或不断增大肾积水或连续几次分肾功能检测出现肾功能下降。
排除标准:输尿管异位开口、神经源性膀胱、后尿道瓣膜或尿道狭窄等原因引起的继发性巨输尿管。
本研究通过我院伦理委员会审查(伦审科研第K2020-12-033号)。
1.2 手术方法
手术由同一术者完成。使用da Vinci Xi机器人手术系统(8 mm cautery instruments),8 mm 30°内镜,单极手术弯剪刀(Monopolar Curved Scissors,Hot Shears470179),双极镊(Cadiere Forceps 470049),持针器(Mega Needle Driver 470194)。
气管插管静吸复合全麻,剪刀卧位,头低脚高,调节手术床向头侧倾斜30°~45°,双上肢呈“投降”位,双下肢稍张开,所有受力部位均用海绵衬垫,绷带固定。消毒铺巾,先行膀胱镜检查,经输尿管口置入3F输尿管导管,导管无法置入,证实为梗阻型巨输尿管。重新消毒铺巾,无菌留置导尿管,排尽尿液。
①建立操作孔:记号笔标记操作部位(图B):3号镜头臂(8 mm)位于脐上缘距离手术目标区域8 cm;2号操作臂(8 mm)位于左下腹距离镜头臂6 cm;4号操作臂(8 mm)位于右下腹距离镜头臂6 cm;辅助操作孔A(5 mm)根据需要,可灵活选择左上腹或右上腹,距离2号或4号操作臂4 cm。气腹针建立人工气腹,调节压力10 cm H2O,流量4 ml/min,置入各trocar(图C),对接机器人,置入机器人内镜,直视下置入单极剪和双极镊,注意避免腹腔脏器损伤。
②建立“腹膜窗”,识别输尿管:与传统2个腹膜切口识别输尿管的方式不同,我们采用自创的“腹膜窗”方式,横向打开膀胱后壁表面腹膜层全层(图D),游离膀胱后壁,打开腹膜层,用无损伤血管夹与周围组织固定,建立一个“腹膜窗”(图E),于输精管或子宫动脉前外侧直接识别游离输尿管(图F)。
③建立更符合生理结构的“逼尿肌斜行隧道”:膀胱外输尿管走行方向呈斜行,电凝标记斜行逼尿肌隧道方向,4-0薇乔线经皮斜行悬吊患侧膀胱壁(图G、H)。经导尿管置入无菌生理盐水,使膀胱充盈,按输尿管直径和膀胱黏膜隧道1∶5的比例,垂直方向切开膀胱逼尿肌层,至膀胱黏膜膨出。
④输尿管原位非乳头状再植:切除输尿管狭窄段,将过度扩张输尿管裁剪成形,向输尿管中置入双J管,将输尿管末端牵入膀胱中。在距离输尿管末端1.5 cm处,用6-0 PDS线在6点和12点钟位置,间断缝合输尿管浆肌层与膀胱壁全层,继续在2个象限各缝合4针,完成膀胱输尿管吻合,实现输尿管原位非乳头植入(图I)。
⑤“由下至上”技术完成切开逼尿肌缝合:4-0薇乔线由下而上间断缝合输尿管及逼尿肌,成形输尿管隧道(图J、K)。4-0倒刺线连续缝合关闭切开的膀胱后壁腹膜层。
1.3 术后随访和疗效评估
术后2个月返院行膀胱镜检查,观察输尿管口形态,拔除双J管。术后12个月返院行泌尿系统超声检查、利尿肾图、99mTc-DMSA及VCUG。
1.4 统计学方法
2 结果
手术均顺利完成,手术时间140~170(152.8±10.5)min,手术出血量<5 ml,术后住院时间3~4 d。3例术后2个月内发生尿路感染,予对症抗感染治疗,拔除双J管后未再发生,无尿潴留、尿外渗等并发症。术后2个月均复查膀胱镜,输尿管口末端自动外翻呈乳头状(图L、M),拔除双J管后,未发生吻合口梗阻等并发症。
随访时间12~18(13.7±2.2)月。12例术后1年复查(图N、O),均无膀胱输尿管反流,输尿管最大径、最大肾盏直径、肾盂前后径均较术前明显缩小,肾皮质厚度和分肾功能较术前增加,梗阻曲线类型较术前改善,差异有统计学意义,见表2。

表2 术后12个月与术前参数对比(n=12)
3 讨论
达芬奇机器人手术系统具有高清的三维视频成像技术,7个自由度机械臂,能够克服腹腔镜手术的技术瓶颈,更精确地游离和缝合,适合复杂的重建手术,特别是小儿尿路重建中的应用[5~7]。经膀胱外Lich-Gregoir再植术是治疗VUR的经典术式,改良后也可用于POM。近10年来国外报道的机器人辅助腹腔镜输尿管再植手术成功率为87.9%~95%,认为其疗效确切,并发症发生率与传统开放手术相近[8~10]。机器人在小儿尿路重建手术中具有腔镜无法比拟的灵活性,用于POM手术效果确切,术后膀胱痉挛、血尿的发生率低[11]。赵冬艳等[12]将机器人和腹腔镜输尿管再植术进行对比,同样认为二者治疗婴幼儿POM均安全、有效且恢复迅速,机器人的手术时间更短。
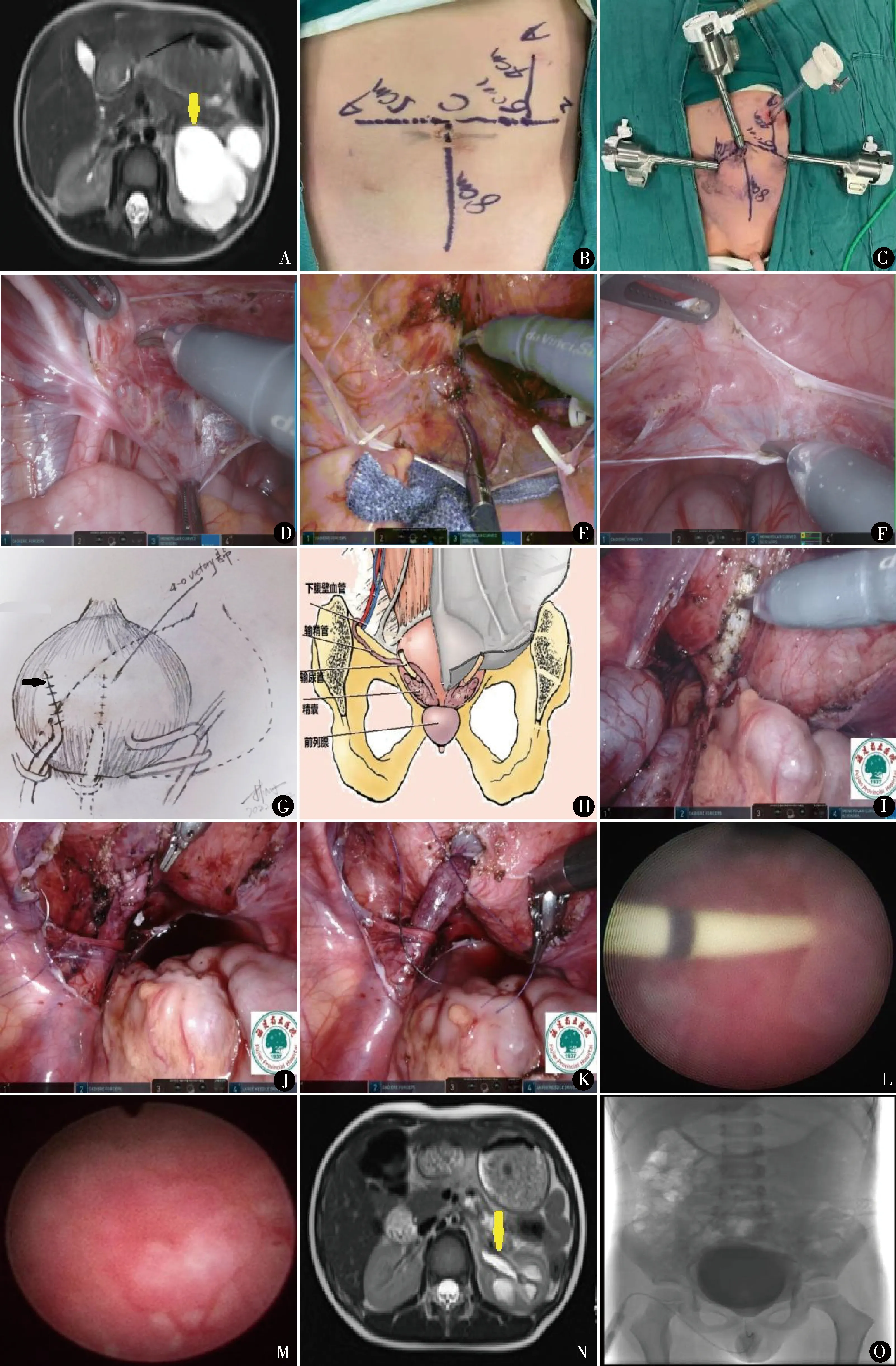
图1 机器人辅助腹腔镜改良Lich-Gregoir术(男,2岁):A.术前MRU提示右侧梗阻型巨输尿管并右侧重度肾积水(黄色箭头为右肾盂扩张积水);B、C.切口位置;D~F.建立“腹膜窗”,识别输尿管;G、H.创建“逼尿肌斜行隧道”的解剖示意图;I.输尿管原位非乳头状再植;J、K.“由下至上”技术完成切开逼尿肌缝合;L、M.术后2个月膀胱镜检查拔除双J管,见植入输尿管自行翻转成乳头状;N.术后12个月复查MRU,提示右侧肾积水肾盂前后径由术前39 mm降至9 mm;O.术后12个月复查VCUG,右侧膀胱输尿管无反流
POM的治疗目标除了解除梗阻外,还需与VUR一样建立新的有效的抗反流机制。但Boysen等[10]的多中心研究显示,机器人手术后VUR影像学缓解率低于开放手术,认为此差异原因可能除了手术医生的个人经验外,还与手术方法有关。尽管对机器人术式进行了不同的改良,包括输尿管末端游离方式、逼尿肌缝合方式、缝合材料等[13,14],但目前哪一种改良手术方式最好尚无定论。为了提高机器人手术的抗反流效果,结合我科改良的腹腔镜原位非乳头Lich-Gregoir再植术的经验[15],我们采用“输尿管非乳头植入”的改良方式。
传统Lich-Gregoir术采用的逼尿肌隧道是纵行垂直隧道,初衷在于输尿管膀胱植入点处的折角较小,此方面改良技术报道较少,部分术者采用彻底松解膀胱前壁的方式,以进一步减小折角,认为更利于尿液排泄和后续膀胱镜检查,但缺乏理论依据。膀胱形态为椭圆形,解剖学上输尿管从外上方斜行进入膀胱,结合我科改良的气膀胱腹腔镜Politano-Leadbetter术[16,17]的经验,我们认为斜行的逼尿肌隧道更符合输尿管生理走行方向;且盆丛神经主要位于膀胱输尿管连接处的背侧及内侧[18],斜向外上方的隧道可以避免盆丛神经损伤,减少术后尿潴留发生率,特别是在双侧POM手术中。但本研究随访时间较短,该改良的疗效还有待进一步随访研究。
技术要点及手术注意事项:①机器人布孔设计,我们使用2、3、4号机械臂,布孔方式呈稳定的三角形。置入机器人操作器械时,先将镜头置于左侧操作鞘中,观察右侧操作鞘器械置入深度及位置,同法置入左侧操作器械,最后安装镜头。与先置入镜头,左右摆动寻找两侧操作鞘置入口相比,此法可简化操作,准确定位器械置入深度及位置,并避免腹腔脏器损伤,在单孔机器人手术中优势更加明显。②建立“腹膜窗”,识别输尿管。与传统的腹膜两切口寻找输尿管方式相比,直接切开膀胱后壁腹膜层,可吸收止血夹灵活固定,打开一个“腹膜窗”,可更明显观察到输尿管及其表面的输精管或子宫动脉的走行,轻松游离输尿管,减少周围组织损伤。③逼尿肌隧道走行方向为斜向外上方,更符合输尿管生理走行方向,较少输尿管折角形成和盆丛神经损伤。④输尿管原位直接乳头再植,结合逼尿肌隧道,双重抗反流。⑤“由下至上”方式完成切开逼尿肌缝合,由下向上逐步间断缝合逼尿肌和输尿管,较少输尿管膀胱壁内段迂曲。
本组12例术后2个月膀胱镜检查,新输尿管口自动翻转成乳头状,术后1年复查,肾积水及输尿管扩张显著改善,肾皮质明显增厚,分肾功能有所提高,均解决梗阻,无术后再梗阻及新反流。但由于随访时间较短,例数有限,远期疗效有待进一步评估。
综上所述,机器人辅助腹腔镜改良非乳头Lich-Gregoir输尿管膀胱再植术,利用非乳头植入和符合输尿管走行的斜行逼尿肌隧道双重抗反流机制,简化手术流程,安全有效,是机器人手术治疗小儿POM的可选术式。
猜你喜欢
实用医院临床杂志(2021年2期)2021-03-20
世界最新医学信息文摘(2021年35期)2021-01-10
透析与人工器官(2020年1期)2020-11-16
透析与人工器官(2020年1期)2020-11-16
中国现代医药杂志(2020年12期)2020-02-06
西南国防医药(2016年6期)2016-12-01
中外医疗(2015年18期)2016-01-04
哈尔滨医药(2015年2期)2015-12-01
中国医疗美容(2015年1期)2015-07-12
济宁医学院学报(2014年4期)2014-08-16
