国外远距高动态对空精确打击发展现状综述
2023-02-24 08:51高书亮樊思思曹军伟
航空兵器 2023年6期
高书亮, 樊思思, 袁 成, 曹军伟
(中国航空研究院, 北京 100029)
0 引 言
远距对空高动态精确打击攻击(以下称远距对空打击)一般是指采用地空、 空空等精确制导武器, 对有人、 无人飞机等空中目标实施距离大于500 km的精确打击行动。 远距对空打击是有效毁伤空中节点, 夺取战场空中优势的重要作战样式。 近年来, 以美国为代表的西方国家围绕远距对空打击开展了大量的装备技术研究工作, 先后开展了以NIFC-CA、 CEC、 AIM-260、 远射等作战概念和装备研制项目为代表的演示验证项目和预先研究, 在作战概念开发、 多源信息融合、 打击兵器研制升级等方面取得了较大的进展, 形成了部分相关作战概念、 代表性装备和新型应用能力。 与传统意义上的对空打击过程不同, 远距攻击这一作战样式有着鲜明的特征: 一是攻击距离远, 这意味着攻击武器的遇靶时间的显著增长, 弹目相对态势更加复杂, 目标针对攻击武器的拦截、 对抗、 规避逃逸等选择迅速增多, 造成了攻击过程更多的不确定性; 二是制导难度大, 由于远距对空精确打击时武器发射平台往往远离空中目标, 飞行距离已经大大超出了武器平台所配备的雷达、 光电等传感器的探测跟踪范围, 在此条件下, 武器发射平台一般难以依靠自身传感器探测并稳定截获并跟踪空中目标, 往往必须依靠多类型外部传感器才能提供相关目标指示数据并辅助精确打击武器完成整个制导过程。 为此, 相比于传统的制空作战样式, 远距对空打击在攻击过程、 武器装备、 作战样式和信息保障等方面都与传统的对空精确打击有着较大的差别, 也是目前国外在相关领域研究的重要问题之一[1]。 本文分析了近年来美国等相关国家在这一领域开展的相关的作战理念和装备技术研究工作, 梳理了其中主要趋势特征、 应用样式和关键支撑性技术。
1 远距对空打击领域国外发展现状
1.1 以远程制空系列化作战理念为牵引, 大力发展远程空空打击兵器关键能力
近年来, 美国军方以空地一体战、 空海一体战、 马赛克战、 分布式作战等先进作战概念为牵引, 逐步对制空作战概念进行了深化, 使其制空作战范围逐步从中近程向远程延伸。 其主要进展包括:
(1) 以新对空作战概念为牵引, 持续强化引导远距对空打击装备发展顶层引导。
以“穿透性制空”“分布式作战(PCA)”等新型作战概念为代表, 近年来美国不断提出新型空中作战概念, 牵引新的作战样式和装备体系。 其中: PCA主要关注具备高隐身能力的穿透性空中平台簇, 在反介入/区域拒止环境下的目标发现、 态势感知和防区外一体化打击能力,随着打击范围、 距离和隐蔽性的逐步提升, 客观上需要多类型的远距对空攻击武器支撑更加快速不可预测的防区外攻击[2], 从而有效扫除敌方空中拦截目标, 打通穿透对手防空体系的通道。 为此, 美国近年来瞄准研制新型、 无人化协同式空战平台, 进一步提升打击火力应用的灵活性, 缩短传统发射载机平台瞄准、 占位和中制导周期, 增强传统发射载机的战场生存能力。 美国Kratos公司与美国空军研究实验室合作开发的一款高亚声速、 远距离攻击的XQ-58A无人机(其外形如图1所示), 采用了隐身设计和开放式任务系统架构, 能够根据不同作战需要配置不同类型任务载荷, 据称该机可与F-22或F-35组成编队协同作战, 在有人机的指挥下实施侦察与打击任务。

图1 XQ-58A无人机Fig.1 XQ-58A UAV
(2) 继续发展新型远射程制空打击武器。
对传统的AIM-120空空导弹进行持续升级。 2022年, 美国空军成功进行了第1枚AIM-120D3导弹实弹射击试验(如图2所示), AIM-120D3导弹正在开展相应的升级改进, 更换电池等多个组件, 采用新型发动机。 据推算, 和AIM-120-C8系列相比, AIM-120D3的最大射程有可能增加50%, 近期有报道称AIM-120D3将于2023年内正式列装。 此外, 美国空军于2021年采用机载“军团/Legion”红外搜索与跟踪吊舱成功发射AIM-120导弹并命中了QF-16靶机, 这是美军首次采用非雷达类传感器完成雷达制导空空导弹的制导, 进一步扩展了AIM-120导弹的使用范围和制导信息来源。 与此同时, 美国空军很有可能已经启动了联合战术攻击导弹(JATM)即AIM-260的研制, 尽管该导弹的射程、 尺寸、 动力形式等关键数据至今仍未公开, 但美国空军此前多次表示, 这款导弹的射程将会对标其他国家的同款产品, 其最大射程极有可能相比于美军上一代主力空空导弹大幅增加, 能够直接在F-22和F-35战斗机的内埋式弹舱挂载发射。 有消息称, 该导弹采用新型固体燃料发动机、 惯导/GPS自动驾驶仪以及高爆破片战斗部, 大量采用AGM-88G先进反辐射导弹增程型项目中的成熟技术, 极有可能采用更加先进的双模导引头, 最大射程有可能是AIM-120导弹的两倍。

图2 美军首次试射AIM-120D3导弹Fig.2 First launch of AIM-120D3 missile
1.2 以构建跨域融合杀伤链为目标, 积极开展多类型跨域对空拦截项目实验
随着标准-6/3等多种新型对空武器的性能提升, 美国正通过新作战概念和作战系统将相关武器逐步整合到跨域对空精确拦截, 实现对空高动态的精确拦截打击效果, 在此基础上逐步构建了“海军一体化防空火控”(NIFC-CA)等先进作战系统, 其基本应用模式如图3所示[4]。 以美国海军NIFC-CA系统为例, NIFC-CA是为了实现远程交战和超视距拦截而发展的一种分布式、 网络化编队防空反导指控系统。 该系统在协同交战能力(CEC)系统基础上升级了通信网络, 将联合对地攻击巡航导弹防御用网络传感器系统(JLENS)、 E-2D预警机、 战斗机、 水面舰艇等水面和空中平台的传感器整合起来, 为系统内作战单元提供统一完整的战场态势和一体化的火力控制, 利用新一代标准-6舰空导弹实现舰艇编队的分布式、 超视距远程防空反导作战。 NIFC-CA的出现, 极大的扩展了美国海军舰艇编队的对空尤其是对低空区域的打击范围, 能够较为可靠的遂行超视距攻击任务, 通过该系统可将E-2D预警机、 F-35隐身战机、 浮空式网络化传感器系统(JLENS)等多种空基装备有效整合到对空杀伤链中来, 进一步提升了对不同高度、 不同速度和不同类型目标的拦截能力。 2014年6月, 美国海军保罗·琼斯号驱逐舰首次利用E-2D预警机提供的空基信息, 发射标准-6舰空导弹拦截摧毁雷达视距外的低空巡航导弹, 完成NIFC-CA超视距海上作战验证。 2015年6月, 美国海军在白沙导弹靶场基于NIFC-CA系统发射了标准-6舰空导弹, 对超声速靶机成功实施了中程超视距拦截, 试验成功表明美国海军舰艇编队初步具备了超视距低空反导作战能力[5]。 2016年9月, 白沙靶场的LLS-1陆上宙斯盾模拟系统首次使用F-35B的空基信息, 发射标准-6导弹成功拦截1架靶机, 完成了F-35B和标准-6导弹的联合实弹测试。
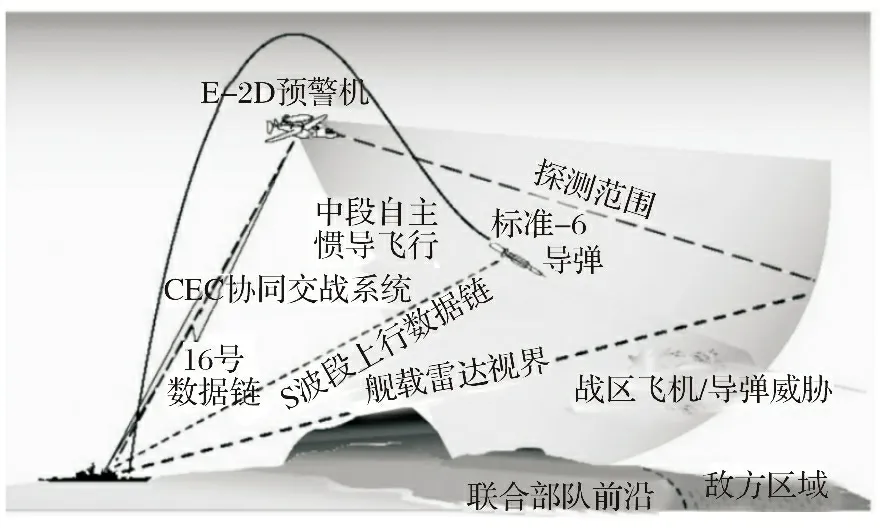
图3 一体化火控-制空系统(NIFC-CA)基本应用模式Fig.3 Basic application mode of NIFC-CA
1.3 以扩大攻击拒止范围为目标, 发展新型分布式对空火力平台研究
针对传统空空、 低空武器的相关性能局限, 美国正在积极探索结合多种类型的复合式空中平台, 进一步增加对空打击的灵活性和攻击范围。 美国国防高级研究计划局(DARPA)启动的“远射/LongShot”的研究计划(其中诺斯罗普·格鲁曼公司的飞行器示意图如图4所示)旨在研究、 开发和验证一款可以携带和发射空空导弹的无人机平台, 该无人机可使用有人机平台运载投放, 以显著扩大攻击范围, 提升应对空中威胁的作战效率: 一是通过无人机发射新型空空导弹, 能够更加灵活的抵近敌方空中目标并实施攻击, 使敌方更难以发现; 二是延长了敌我双方的交战距离, 使得敌方对自身战斗机实施反击的难度加大, 提升了有人飞机的战场生存能力; 三是提高了打击成功概率, 无人机可在离对手更近的地方发射空对空导弹, 优化初始发射条件, 减少敌方反应时间, 提高杀伤概率[6]。 2017年9月, DARPA在其发布的视频中介绍了飞行导弹挂架(FMR)的概念(如图5所示)。 FMR是一种高度简化、 可快速批量生产的可消耗无人机, 主要用于配装美军三代机, 既可作为普通专用挂架使用, 即战斗机通过其发射各类武器弹药, 但自身不发射出去。 同时也可作为前出/伴飞僚机使用, 由战斗机发射并前出执行巡航飞行和武器发射任务。 从发布视频中可见FMR可挂载1或2枚AIM-120导弹, 具备按预设航路巡航飞行能力, 可以以马赫数0.9的速度飞行20 min, 发射后不回收, 如未发射则可重复使用; 2022年, 洛克希德·马丁公司在其发布的未来有人-无人分布式编组作战概念中, 展示了4种不同的无人机平台, 其中包括了一种称为“普通多任务卡车(CMMT)”的无人及平台(如图6所示), 其采用V型尾翼和弹出式后掠机翼, 可由F-35战斗机或C-130运输机挂载发射, 并能够实施空中导弹发射, CMMT旨在通过模块化和可扩展设计, 成为分布式、 低成本的空中弹药打击节点。 尤其是在其展示视频中CMMT在机头部位配置了比较全面的射频探测传感器载荷与天线阵面, 因此很有可能具备了主动目标探测与跟踪能力, 能够自主完成一定的对空攻击任务。

图4 “远射”项目飞行器示意图Fig.4 Basic appearance LongShot flight vehicle

图5 飞行导弹挂架(FMR)概念图Fig.5 Basic appearance of FMR

图6 CMMT无人机外形示意图Fig.6 Basic appearance of CMMT UAV
2 国外远距对空打击的典型应用样式
总结当前国外远距对空打击的发展现状, 其关键是通过构建更加完备、 健壮的打击链条, 解决远距目标精确指示问题, 保障在整个攻击过程中为远距打击武器提供满足精确制导要求的目标火控信息。 其中的典型作战应用样式包括:
2.1 协同目标探测制导远距攻击
协同目标探测往往针对武器发射平台自身的探测性能不足, 采用具有更强探测能力的外部平台对目标进行探测、 跟踪和识别, 将目标位置、 速度、 高度、 方位、 属性等目标信息通过数据链发送到武器发射平台, 武器发射平台借助目标信息完成发射占位、 火控解算并发射打击武器; 随后在打击武器飞行过程中, 外部平台持续获取目标跟踪数据并通过数据链与武器发射平台共享, 由武器发射平台完成对武器的中制导指令修正, 直至命中目标[7], 如图7所示。 这种样式的实质是通过探测能力更强的外部平台(预警机、 侦察卫星、 浮空器等)获取目标信息, 弥补武器平台在目标探测威力方面的不足。 在整个打击过程中, 需要外部平台对目标持续跟踪, 保持武器发射平台对打击武器的跟踪和制导, 同时发射平台与制导平台之间、 发射平台与武器之间需全程保持可靠的实时通信链路, 对整个打击任务规划过程提出了较高要求, 也使得武器发射平台不易实现较早脱离, 难以对自身雷达资源进行合理调度分配, 在削弱武器发射平台的生存能力的同时也很难兼顾多目标攻击任务。
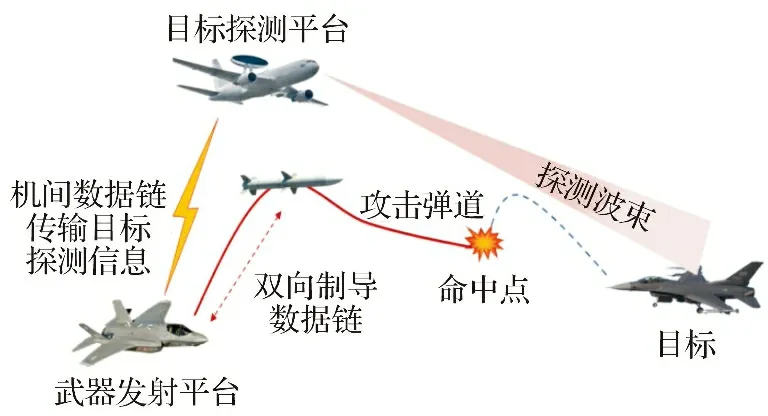
图7 协同目标探测制导远距攻击样式Fig.7 Long-range attacking mode based on cooperative target detection
2.2 协同目标指示制导远距攻击
协同目标指示制导是指武器发射平台根据外部目标指示平台提供的目标数据发射武器, 随后进行制导权交接, 由外部目标指示平台完成攻击全过程的目标指示和中继制, 如图8所示。 这种样式要求可以扩展目标探测和攻击范围, 使武器发射平台在完成发射任务后即可迅速脱离或转而执行下一任务, 在解放武器平台作战能力、 提升战场生存能力方面具有较大的优势, 但同时要求外部目标指示平台能够及时、 可靠的与打击武器建立制导数据链路, 同时能够完成对待攻击目标的全程跟踪, 对外部目标指示平台的目标探测能力、 信息处理与传输能力都提出了较高的要求, 因此外部目标指示平台往往与武器发射平台不属于一类平台[8-9]。 从美国当前发展情况来看, 在NIFC-CA等项目研究过程中, 先后将F-35隐身战斗机、 E-2D预警机等先进空中作战平台引入到美国海军舰艇防空中来, 能够发挥空中传感器平台的超视距目标指示优势, 极大的扩展了对低空目标的探测搜索范围, 克服了地球曲率半径影响, 实现了对亚、 超声速目标的低空拦截。

图8 协同目标指示制导远距攻击Fig.8 Long-range attacking mode based on cooperative target detection
2.3 网络化接力制导远距攻击
由于单一种类平台的目标探测、 信息处理、 数据传输等能力的限制, 需要在协同制导的基础上再进一步构建分布式、 网络化的外部制导信息体系, 通过引入包括天基、 空基、 陆基等多类型的信息支援节点, 充分发挥多体制、 多平台、 多频段的目标探测与跟踪优势, 从而进一步扩展目标攻击范围和打击精度[10]。 在网络化制导过程中, 多类传感器协同工作和信息有效融合, 实现对大机动、 高隐身、 高速度等多种类、 多方向和多批次目标的连续有效跟踪及准确识别, 构建更加清晰准确的空战场态势, 形成更加完备的目标跟踪识别能力, 支撑在高动态、 高对抗条件下的火控级信息实时生成和传输[11-12]。 以高超声速武器拦截防御作战为例, 美国导弹防御局发布“区域高超声速导弹防御方案”, 计划利用宙斯盾系统、 远程识别雷达(LRDR)、 弹道导弹天基探测系统(HBTSS)、 滑翔段拦截弹(GPI)和标准-6导弹等实现对高超声速飞行器的滑翔段拦截。 即充分发挥HBTSS高轨卫星的大范围目标预警优势, 尽早发现高超声速目标; 在完成初步跟踪识别后, 有效引导宙斯盾雷达系统和LRDR等地面远程雷达快速调整实现对高超声速目标潜在机动空域范围, 精确确定波位编排区域和照射顺序, 从而快速、 高概率地捕获到目标并为反高超拦截作战提供目标轨迹预测和火控解算数据[13], 其基本应用过程如图9所示。

图9 美国反高超目标作战杀伤链Fig.9 Anti-hypersonic target killing chain
3 远距对空打击的关键支撑性技术
3.1 新质对空武器平台设计技术
传统对空武器(如空空导弹、 地空导弹等)受诸多因素限制, 导致其有效射程或射界有限, 客观上难以覆盖远距空域, 同时由于制导体制、 动力形式、 气动布局等方面的局限, 使得其难以胜任远距攻击任务。 随着美国AIM-120D、 AIM-260等先进空空导弹的不断研制或升级, 美国已经客观上具备了覆盖更远对空攻击距离的武器基础。 相比于传统导弹武器, 目前提升武器攻击范围的方法主要包括: (1)依托新型发射平台。 武器攻击射程往往取决于其发射条件, 不同发射位置、 高度和初速所对应的最远射程也基本固定。 从美国“远射”等项目来看, 充分利用复合式发射平台将导弹运抵到指定阵位再行择机发射, 能够充分选择最佳占位, 进一步抵近敌方目标, 是导弹增程的有效途径之一; (2)采用新型动力体制, 通过双/多脉冲固体火箭发动机、 冲压发动机和旋转爆震等新体制发动机, 改进平均推力、 工作时间、 比冲等关键性能参数, 提升持续飞行时间, 有效提升武器的射程、 末速等典型指标, 欧洲研制的“流星”空空导弹在空空武器平台上首次使用了冲压动力体制。 (3)采用多模式复合导引体制。 目前美国等西方国家已在多型精确制导武器上广泛采用多模主动相控阵体制, 其主要类型如表1所示[14]。 多模复合技术能够获取目标的多个维度信息, 增强导引系统在复杂战场环境下的探测识别能力、 信息感知能力、 反隐身探测能力和抗干扰能力。
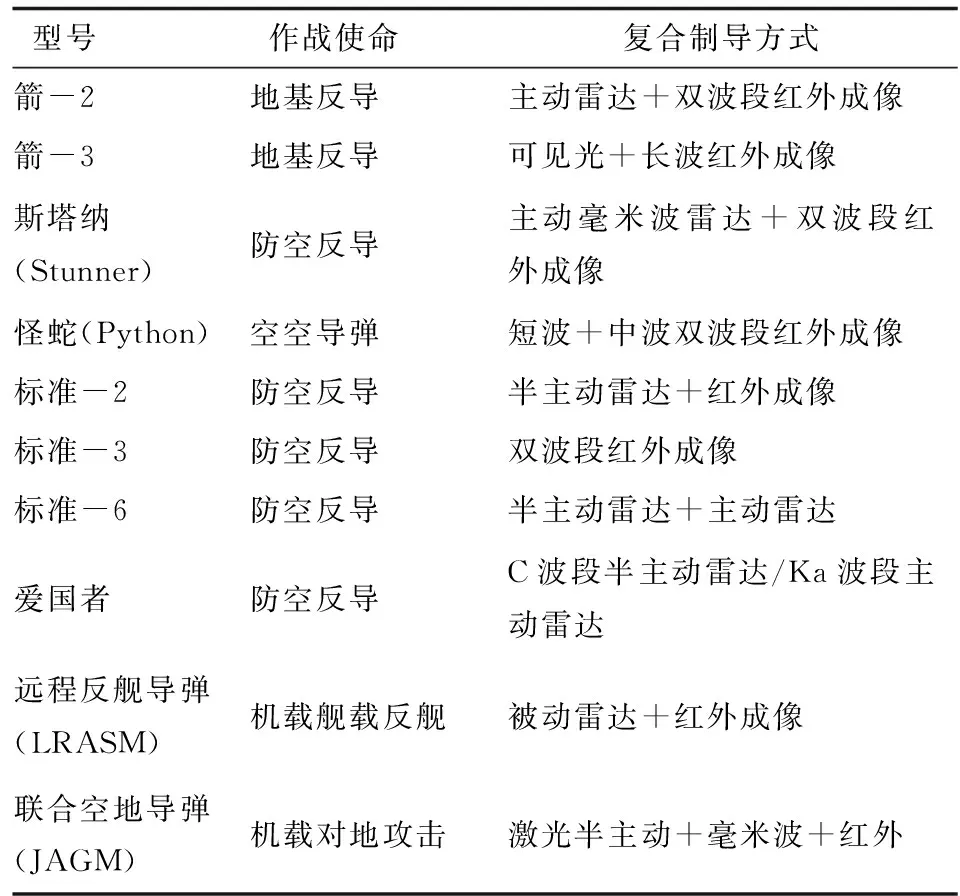
表1 采用多模复合导引体制的国外典型制导武器Table 1 Typical precise guidance weapons based on multi-mode guidance
3.2 基于跨域网络的远程目标指示和制导技术
由于单一武器平台探测范围、 目标分辨率、 探测精度等方面存在不同程度的局限, 仅靠单一平台提供制导信息, 往往存在着平台生存能力差、 多目标制导性能弱和易受电子干扰等问题, 因此仅靠单一类型传感器完成制导不利于精确打击的灵活性, 尤其是对远距离攻击过程中的复杂弹目态势变化和战场环境缺乏适应能力。 跨域网络协同制导实际上是采用多种不同类型、 能力互补的传感器平台构建制导信息网络, 实现全程制导信息的精确可靠供给。 在网络化协同制导过程中, 目标状态信息不再由单一的机载传感器或弹载传感器获得, 而是由分布于陆、 海、 空、 天等多种平台上的传感器提供。 该技术的关键难点包括: (1)跨平台时空统一, 由于各平台采用的导航基准、 链路传输时延等都存在较大差异, 导致各平台所提供的目标探测跟踪信息实际上附加了各自时空基准不匹配所附加的误差, 如何校正不同信息对应的时空基准就成为当前该领域的研究热点; (2)多传感器信息融合处理, 针对多种不同类型传感器在信息维度、 质量、 分辨率、 更新时间等方面的不同, 可以采用数据级、 特征级和决策级等不同类型的信息融合策略, 形成面向目标博弈场景下的目标位置、 速度、 高度、 方位等信息自动获取方案, 甚至能够形成面向目标属性等深层次信息识别的基本能力, 从而进一步提升目标指示、 目标识别和协同制导能力。
3.3 弹群自主协同攻击技术
由于远距区域的复杂交战态势, 采用武器间的自主协同可以有效提升对复杂环境的适应能力, 从而进一步确保打击效果。 当前国外对弹群自主协同技术进行了多种研究, 提出了面向弹群自主态势感知、 协同探测、 协同攻击等多方面的要求。 从近年来多次局部武装冲突情况来看, 智能弹群或无人蜂群发展进展很快。 作为无人自主弹群概念的提出者, 美国在已经提出了多个蜂群作战演示概念。 美国空军正在实施的“金帐汗国”网络弹药项目, 计划在库存武器系统上增加无线数据链路和网络化协同武器相互之间能够共享数据并进行互操作[16], 从而提升武器网络化协同功能的有效性(其典型演示场景如图10所示)。 由于武器使用共享数据来改进整个武器群的信息, 从而提高整个群体信息的有效性。 当每种武器探测到同一目标的位置数据时, 综合这些信息数据可以减小目标位置的误差, 从而实现更精确的火力打击。 当前, 英国正开展基于亮云诱饵(BriteCloud)的集群协同干扰试验(如图11所示), 亮云采用数字式射频存储(DRFM)体制, 能够从任何标准的55 mm诱饵发射器上发射, 最初在台风战斗机等平台上对该诱饵进行了测试, 未来将会整合到F-35B战斗机上。 多个亮云组成的无人集群可以在大范围内实现最佳的覆盖干扰, 在更长的时间内执行多次电子攻击, 极大的提升了在空战过程中的电磁空间对抗能力, 这一点在莱昂纳多公司和英国皇家空军快速能力办公室(RCO)于2020年合作开展的演示实验中得到了证明。 此外, 采用弹群自主协同攻击技术, 能够充分发挥弹群中不同节点在探测、 制导、 抗干扰等不同维度上的性能优势, 针对不同末端攻击情况遂行协同探测、 协同制导和协同抗干扰等多种作战样式。

图10 “金帐汗国”项目Fig.10 “Golden horde” project

图11 基于亮云诱饵的集群协同干扰试验Fig.11 Cooperative jamming verification based on BriteCloud air-launched decoy
3.4 拒止环境下的智能自主决策技术
拒止环境下的分布式智能作战是未来战争形态的一个重要发展方向。 远距攻击过程的末端远离我方而靠近敌方纵深, 往往会面临更加复杂的“反介入/区域拒止”态势, 因此拒止环境下的智能自主决策是未来的重要发展方向。 美军于2015年开始陆续发布了部分拒止环境下无人系统项目, 更加强调分布式单元的突防能力、 研发成本、 察打融合度、 容错性等。 其代表项目包括近战隐蔽自主一次性无人机(CICADA)项目、 “小精灵”项目、 低成本无人机集群技术(LOCUST)项目。 2014年, “拒止环境中协同作战”(Collaborative Operations in Denied Environment, CODE) 项目启动, 旨在开发自主协同算法提升开放式结构下分布式无人系统在拒止环境中的作战能力。 该项目在其3个执行阶段实现了战术战法研究、 开放式系统架构下的软硬件开发和一系列验证试验, 能够在通信拒止和GPS拒止环境下对多个虚拟目标进行战术应对和打击, 其典型作战概念如图12所示。 此外, 美军还针对战斧导弹等远程攻击武器进行了拒止环境下的性能提升改进, 2013年, “战术战斧”巡航导弹(第四代“战斧”导弹, 如图13所示) 完成了被动雷达导引头的传感器改进, 于2015年进行了主动雷达导引头试验。 改进后的“战术战斧”可实现对对方各类型传感器的识别和定位, 提供实时态势感知并打击高价值目标, 提升拒止环境下的分布式、 智能作战水平和抗电磁干扰能力, 使“战斧”编队具备“协同突防-打击-打击评估-二次打击-打击评估”的作战能力[17]。

图12 CODE项目典型作战概念Fig.12 Typical operation concept of CODE project

图13 第四代战斧巡航导弹系统基本组成Fig.13 Basic composition of BGM-108 missile
3.5 远程武器任务在线监视与调节技术
超远程攻击意味着空战过程中对超视距时敏目标的攻击距离、 攻击包线和攻击窗口的大幅增加, 因此攻击武器的遇靶时间和距离都大幅度提升, 随着弹目相对态势的急剧复杂化, 对武器的在线调节校正都提出了更高的要求, 如果能够通过具有较强的目标探测跟踪和信息处理与指挥能力的空中平台实时接入武器攻击过程中的飞行参数和工况参数, 则可对武器远程攻击过程进行全维度监视和管控, 结合实际的战场态势实现更加高效的任务规划与火力分配[18]。 为此, 美国以预警机为空战指挥平台, 开展了多次预警机与导弹武器实时铰链过程研究, 在实现接力制导的基础上, 探索预警机指挥武器攻击的演示验证: 2013年7月, 美军举行了“三叉戟勇士2013”演习, 演示试验了E-2D预警机指挥新型JSOW空地导弹对海上移动舰艇的攻击过程。 演示试验过程中, E-2D预警机直接指挥引导1架F/A-18E/F战斗机发射新型JSOW空地导弹, 同时, E-2D还接收了这枚导弹双向数据链传回的状态更新信息和命中提示信息。 验证了预警机等平台能够通过灵活的数据网络与导弹进行可靠双向连接, 确保导弹能够实时、 无缝的嵌入空基通信网络[19-20]。 一旦发射平台能够实时、 高更新率的获取远程攻击弹药的飞行和工作状态, 则可以充分发挥自身态势信息全、 决策能力强的优势, 全程精准调节武器的工作模式与运行路径, 实现攻击性能的在线监测和目标-火力在线可调分配, 从而将目前国外中远距空空导弹的“发射后不管”状态转变为“发射后智管”, 进一步提升攻击效率和作战灵活性。
4 结 束 语
汇总上述国外目前在超远程对空精确打击领域的装备和技术发展动向, 总体上体现出了如下特点: 一是作战概念顶层牵引。 从美国等国的发展情况来看, 在分布式、 马赛克、 穿透式制空等多种作战概念牵引下, 超远程对空精确打击成为支撑上述作战概念落地的重要战术战法; 二是打击兵器快速发展, 随着多种技术手段加入, 传统的空空、 地空等对空武器正逐步采用多种技术以期突破原有射程限制, 从而满足支撑超远距对空精确打击的需要; 三是持续提升跨域信息融合应用能力, 不断满足超远程攻击的超时间、 大范围和高精度信息保障需求。
猜你喜欢
军事文摘(2020年14期)2020-12-17
兵器知识(2019年1期)2019-01-23
小哥白尼(趣味科学)(2018年5期)2018-06-21
小哥白尼·军事科学画报(2017年3期)2017-06-12
军营文化天地(2017年12期)2017-03-01
北京航空航天大学学报(2016年9期)2016-11-16
北京航空航天大学学报(2016年7期)2016-11-16
少儿科学周刊·儿童版(2016年2期)2016-03-19
北京航空航天大学学报(2016年4期)2016-02-27
儿童故事画报·发现号趣味百科(2015年10期)2016-01-20