薄片式软体爬行机器人
2023-03-01 14:39刘学婧黄修军王思清
轻工机械 2023年1期
张 彬, 刘学婧, 苏 倩, 陈 琛, 黄修军, 王思清, 邢 宇,2*
(西安工程大学 机电工程学院,陕西 西安 710600;2.西安理工大学 机械与精密仪器工程学院,陕西 西安 710000)
机器人的设计及优化一直以来是世界各国学者研究的重要领域之一,也是现代国民工业生产中实现全面自动化的助力因素。我们日常见到的多是刚性机器人,大多有着复杂的结构、较高的能耗及较差的适应性。为弥补刚性机器人的不足提出了软体机器人的概念。软体机器人作为一类新型机器人,具有结构柔软度高、环境适应性好、亲和性强和功能多样等特点,它由完全软材料或部分软材料加工而成,自身可连续变形,与刚性机器人相比具有更高的柔顺性、安全性和适应性。其在复杂易碎品抓持和狭小空间作业等方面具有不可比拟的优势[1],能够适应各种非结构化环境,与人类的交互也更安全[2]。
其中仿生软体机器人通过模仿自然界生物的结构、动作,具有较强的环境适应性,在侦查、救援、检修和医疗等领域具有重要应用[3];各种软体机器人功能和作用不同,一些软体机器人模仿自然生物的运动姿态能实现身体的高曲率弯曲和扭转,展现出对外界环境的适应性[4-5]。例如:通过介质弹性体人造肌肉产生软体机器人身体的快速周期性变形,结合静电吸附足,可使软体机器人能够粘附在墙上的软壁攀爬机器人[6];通过电磁驱动的一种可重构的软壁爬壁机器人[7];以壁虎为启发的能够爬倾斜的平坦表面的软体机器人等[8]。
课题组设计了一种采用介电弹性体智能材料(dielectric elastomer,简称 DE)驱动的薄片式蠕动爬行机器人。薄片式爬行机器人可以在高度仅为17 mm的狭小缝隙中进行爬行,并携带微型摄像头进行探索,或携带超声波等探伤工具进行特殊工况的探伤(如进行管道探测或对于有较长缝隙的复杂零件进行深入探测或探伤)。课题组通过实验讨论电压频率、电压幅值及剪切条数量对机器人爬行速度的影响,得到了其最大爬行速度、最高承载能力和最大爬坡角度等主要技术参数。
1 软体爬行机器人的结构与原理
基于介电弹性体薄膜纯剪切形式下在外加电场的激励下能产生较大变形的特性,并利用弹簧进行储能,设计了一种薄片式蠕动爬行机器人,结构如图1所示。该软体机器人主要由1个DE驱动器和2个单向摩擦片组成。其中DE驱动器作为变形主体,单向摩擦片作为机器人的足部。
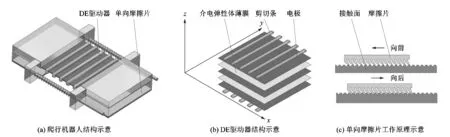
图1 软体爬行机器人的结构与原理Figure 1 Structure and principle of soft crawling robot
图1中DE驱动器由电极、DE薄膜和多个剪切条组成。此处DE薄膜采用3M公司的VHB4910胶带,为提升DE薄膜的稳定性对其进行了等双轴4倍拉伸,为了提升其输出力且不增加驱动电压,采用了2片薄膜3片电极呈三明治结构进行叠层贴附。原则上,当DE薄膜的拉伸状态远小于极限拉伸时,通过束缚住y轴方向上的预拉伸,会使得x轴方向的驱动应变越大[9-10],故采用多个剪切条平行等距地贴附于驱动器上、下表面,使得薄膜在y轴方向长度与剪切条长度保持一致,束缚住已在y轴方向预拉伸过的薄膜,以得到较大的x轴方向的应变。经预拉伸过薄膜放松后,只能延x轴方向收缩,随着在DE驱动器上施加交变的电压,在弹簧及DE薄膜电学特性的作用下,驱动器延x轴方向进行伸缩运动。
具体制作方法如下:首先在拉伸装置上对DE薄膜进行拉伸,初始膜尺寸为边长为80 mm的正方形,拉伸后为边长为320 mm的正方形。其次采用刚性框架贴于膜上、下表面用来限制住膜的拉伸,并将框架和框架内的薄膜从整张薄膜中裁剪下来,接着对框架内的薄膜进行电极的贴附并引出导线,按照2片薄膜3片电极呈三明治结构进行叠层贴附,并在此驱动器上下表面使用硅橡胶粘结剂贴附剪切条,用以约束住y轴方向的预拉伸,如图1所示,形成DE驱动器作为爬行机器人的主体。将DE驱动器安装在准备好的外壳上,并在两侧安装压缩弹簧,整体从刚性框架上取出。
由于DE驱动器的变形,使得双脚和基底之间产生了相同的摩擦,导致双脚对称运动,无法推动机器人前进。这里我们采用单向摩擦片(前进摩擦小,后退摩擦大)附着在机器人外壳底部作为其足的方式。
由于薄膜柔软的特性只能输出拉力,故在两侧引入弹簧,使弹簧处于压缩状态,弹簧的弹力与薄膜的弹力达到平衡。在加电的状态下薄膜竖直方向伸长释放弹簧储存的弹力,使得机构可以输出一个向前的推力,断电后薄膜靠自身的弹性回缩,此时产生一个拉力。在周期性电压激励下爬行机器人整体表现为伸缩运动。在通电时爬行机器人整体伸展时,前脚向前阻力小,使前脚向前;在断电时爬行机器人整体收缩后脚向前阻力小,使后脚向前完成一个爬行循环。
2 爬行机器人性能测试实验
因为不同的参数设置对机器人的爬行速度有很大影响,通过实验的方式进行了具体的分析。施加的电压由台式电源(Trek 10/10B-HS)提供,脉冲持续时间由波形发生器(Agilent 33220A)输入[11];实验测试使用的压缩弹簧为线径0.3 mm,外径4 mm的碳钢弹簧;摩擦片采用涤纶丝布片;外壳及剪切条均采用亚克力板切割而成;DE膜厚度为1 mm;电极是导电聚合物胶带,型号EL8006。
实际采用的弹簧原长为50 mm,压缩后的长度为35 mm;摩擦片的尺寸为40 mm×25 mm;电极选用导电聚合物胶带(型号EL8006),电极尺寸即有效驱动区域为40 mm×40 mm;剪切条的长、宽、高分别为42,2和1 mm;所组装的机器人整体尺寸为100 mm×65 mm×15 mm;质量为34.7 g,如图2所示。机器人爬行时足部的接触表面为离型纸粗糙面。
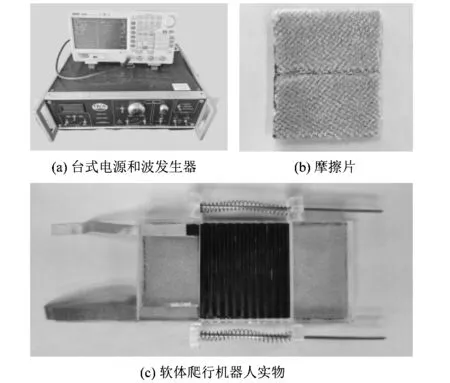
图2 设备和实物Figure 2 Equipment and physical objects
2.1 不同频率的电压信号对爬行速度的影响
采用不同频率的电压进行驱动会导致DE驱动器伸缩速率的变化,从而影响爬行机器人的运动速度。在加载交变电压下,较低频率时DE驱动器有着较大的变形,较高频率时DE驱动器由于快速充、放电会产生高频的震动,在此,测试采用的是幅值为5 000 V的正弦波,频率范围为0.1~25.0 Hz,如图3所示。

图3 正弦波信号Figure 3 Sine wave
剪切条数量为3,7和11时软体爬行机器人在不同频率下速度的变化趋势如图4所示。从图中可知不同数量剪切条在不同频率时机器人的速度变化展现出一致性。爬行机器人的速度随频率的增加而增大,在频率达到12.5 Hz后速度趋于平稳。3条速度曲线相比较,剪切条数量为7的爬行机器人的速度最优,在电压幅值5 000 V、频率25 Hz的正弦波的驱动下最快速度可达4 mm/s。

图4 软体爬行机器人在不同频率下的爬行速度Figure 4 Crawling velocity of soft robot at different frequencies
在较低的频率下,DE驱动器可以充分进行充电和放电,使得一个周期内DE驱动器的形变量较大,此时软体机器人的爬行主要靠驱动器的伸缩运动。而在较高的频率下,DE驱动器已不能充分地进行充电和放电,一个周期内形变量较小但单位时间往复运动次数多,此时软体机器人的爬行除了DE驱动器的伸缩运动外还有DE驱动器震动的作用辅助前行。
由于所提出爬行机器人是靠单项摩擦片作为机器人的足部,故其运动速度和频率关系较大,频率越高其主体伸缩越快,反映到运动上就是爬行越快。当频率到达一定值后由于主体DE驱动器无法充分充、放电使其爬行速度达到一定阈值。继续增加频率会导致震动过大影响爬行机器人运动的稳定性。
2.2 不同数量的剪切条对爬行速度的影响
剪切条起着维持DE膜水平预拉伸的作用,剪切条数量太少不足以完全约束住DE膜的水平预拉伸,数量太多则会减少DE薄膜有效驱动面积。
测试时采用5 000 V的正弦波,机器人采用剪切条数量分别为1,3,5,7,9,11和13,测试结果如图5所示。从图5可知频率为0.1 Hz时,剪切条数量的变化对速度的影响不大;在频率为1.0,5.0和25.0 Hz时随着剪切条数量的增加,机器人的运动速度呈现先增加后下降的趋势;在剪切条数相同时,随着频率的增加,机器人的运动速度随之增加;在不同频率时,剪切条数量为7和9的爬行机器人性能较好,有着较快的运动速度。
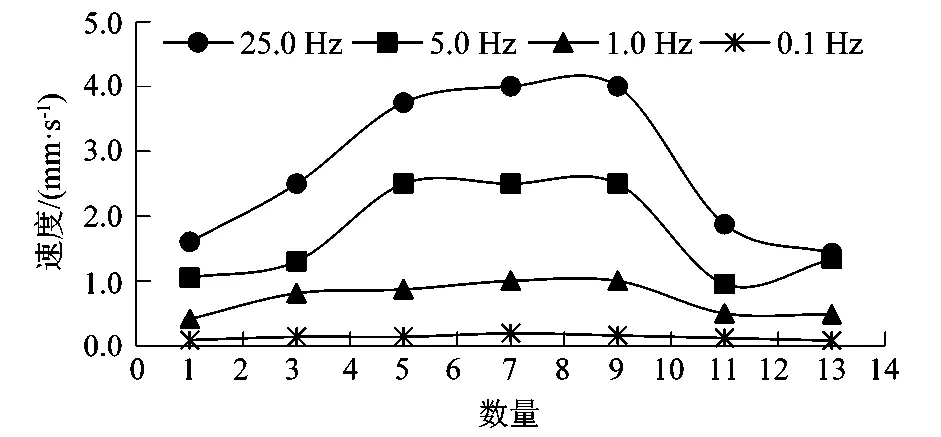
图5 不同剪切条的数量与软体机器人爬行速度的关系Figure 5 Relationship between number of different acrylic thin strips and crawling speed of soft robots
2.3 不同的电压幅值对爬行速度的影响
电压幅值的大小与DE驱动器的位移量有关,较高的电压幅值可以使驱动器产生更大的变形。根据上述测试选择7个剪切条的爬行机器人作为测试样品,驱动信号采用25 Hz正弦波。
如图6所示,软体机器人的爬行速度随电压幅值的升高而增加,在6.0~7.5 kV段曲线上升加快,说明运动速度提高,在7.5 kV时软体机器人的爬行速度可达46.6 mm/s。

图6 不同电压幅值下软机器人的运动速度Figure 6 Movement speed of soft robot under different voltage amplitudes
测试过程中发现,电压低于4 000 V时,DE致动器变形较小,不足以驱动软体机器人的爬行运动(电压幅值太小使驱动器变形较小,不足以克服向前的摩擦力);电压高于7 500 V时会导致软体机器人运动不平稳。
2.4 爬行机器人的负载能力和爬坡能力
在提升机器人的爬坡能力和负载能力方面,根据上述实验数据可知使用较高的电压幅值和较低的频率驱动效果更好。较高的电压幅值可以驱动DE执行器产生更大的变形,释放更大的弹簧力以产生更大的驱动力。低频信号驱动可以有效避免振动,使执行器完全伸缩变形,从而产生更大的驱动力。试验采用电压为7 500 V,频率为1 Hz的正弦波,对剪切条数量为7的爬行机器人进行了测试。最大载荷为60 g、以4.44 mm/s的速度在平面爬行的测试如图7所示;在15°坡面以5 mm/s的速度空载爬行的测试如图8所示;机器人表现出良好的承载能力和爬坡能力。爬行机器人的运动过程如图9所示。

图7 软机器人负载测试Figure 7 Load test of soft robot
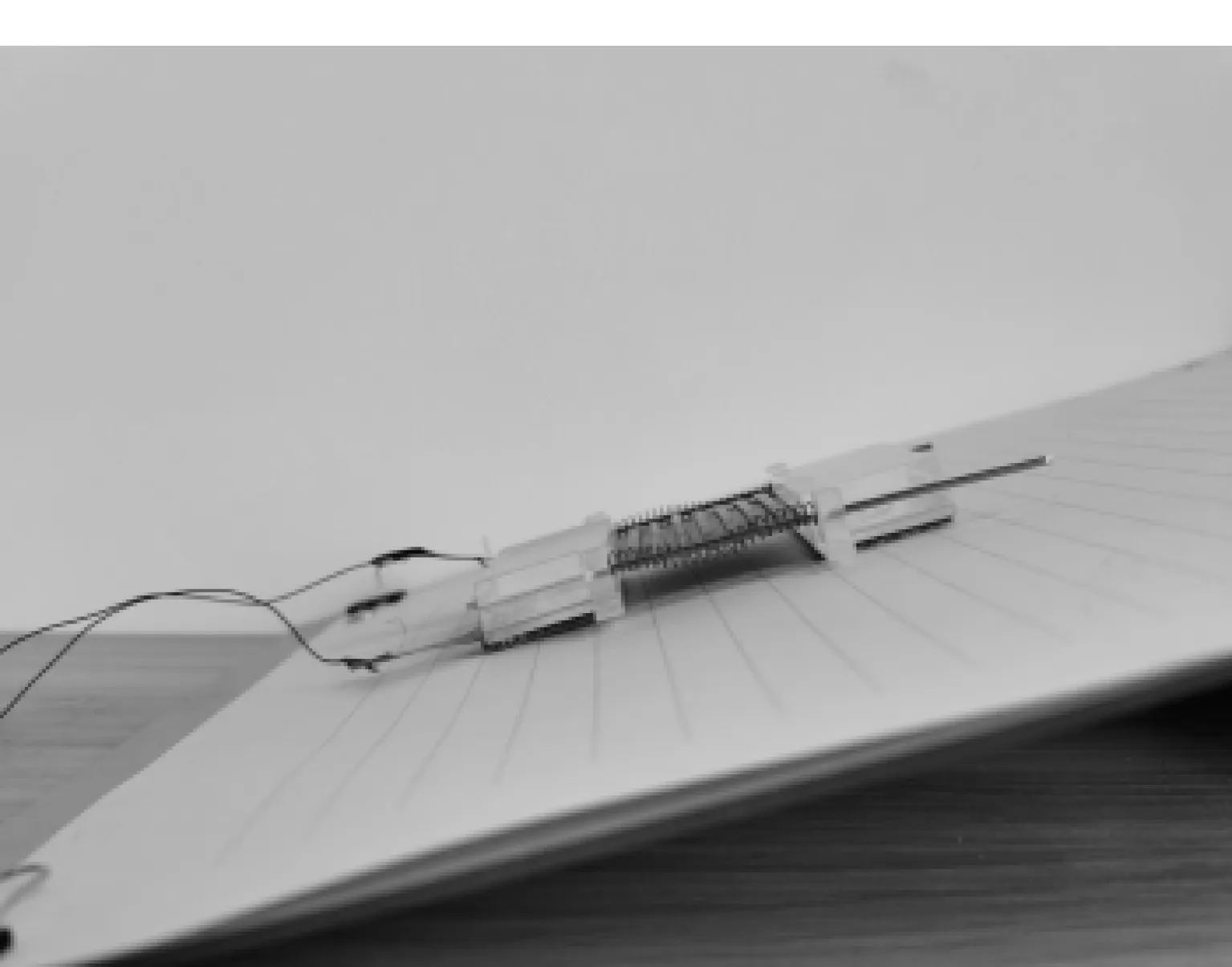
图8 攀爬能力测试Figure 8 Climbing ability testing

图9 爬行机器人的运动过程Figure 9 Movement process of crawling robot
3 结论
课题组设计了一种基于介电弹性体智能材料驱动的薄片式软体爬行机器人,可以在高度仅为17 mm的狭小缝隙中进行爬行,文中介绍了软体爬行机器人的结构设计及工作原理,并以实验的方式测试了各个变量对软体爬行机器人性能的影响。
实验所得的数据表明:在提升机器人爬行速度方面,可通过选取更高频率的加载电压、更高的电压幅值以及合适数量的剪切条个数的方式来实现;在提升爬坡能力和负载能力方面,可通过降低电压频率和提升电压幅值来实现。总体而言,所提出的软体爬行机器人的运动与蠕虫的爬行运动相似,速度较为灵活,能够根据输入的电压波形来实现无级变速爬行,根据需求以不同的平稳速度进行爬行,针对需要快速移动的场合其最高速度可以达到46.6 mm/s。针对有一定坡度的路况或需要负载的场合其能够做到在15°的坡道上行进及能够承载60 g的质量稳定爬行。与同等体积下的同类软体机器人相比性能优异,足以负载起市面上常见的微型摄像头及探伤探头等工具,而且它的高度尺寸小,可以通过17 mm的狭窄缝隙,在一些过于狭小的空间等人工无法直接作业的环境,进行探测或探伤。
该研究结果局限于2层DE膜制成的爬行机器人,通过改变DE膜层数和弹簧刚度可以获得更快的爬行速度及更高承载能力的软体爬行机器人。
猜你喜欢
水道港口(2022年2期)2022-07-04
上海交通大学学报(2021年2期)2021-03-02
军事文摘(2020年24期)2020-11-29
电脑爱好者(2020年6期)2020-05-26
电子制作(2017年7期)2017-06-05
光学精密工程(2016年5期)2016-11-07
电测与仪表(2016年15期)2016-04-12
电源技术(2015年5期)2015-08-22
电测与仪表(2015年7期)2015-04-09
上海电机学院学报(2015年3期)2015-02-28