
果园植保仿形喷雾技术研究现状与展望
2023-03-20 06:14姜春淼陈金成
安徽农业科学 2023年4期
张 惠,姜春淼,张 景*,陈金成,潘 峰
(1.新疆农垦科学院机械装备研究所,新疆石河子 832000;2.石河子大学机械电气工程学院,新疆石河子 832000)
我国果园种植面积和水果产量常年稳居世界首位,水果已成为我国继粮食和蔬菜之后的第三大农业种植产业[1]。果园田间生产作业主要包括整地、中耕除草、开沟施肥、灌溉、植保、修剪、采收等多个环节,过程烦琐、用工需求大[2-3]。其中,植保作业作为防治病虫害、调节长势的重要环节,不仅劳动强度大,操作者还要面临有毒作业环境,其解放人力、实现机械化的需求更显迫切。尤其,随着我国城市化进程的加快,农村劳动力愈发紧缺,推进植保作业机械化、自动化已成为实现果园生产节本增效的必然要求[2,4-9]。
喷雾装备是实现果园植保机械化的重要载体,一般由机架、喷杆、喷头、药箱、动力系统等部分组成。近年来,随着精准喷雾技术的发展,喷雾装备逐步向自动化、智能化迭代升级[10-11]。尤其,为提升雾滴分布质量,越来越多的喷雾机械配置了仿形机构及其控制系统,即通过人工观测或传感器探测树冠形状尺寸,手动或自动调整喷杆折叠位姿实现对树冠均匀包络,从而均匀、稳定喷雾距离及药液分布,改善喷雾效果[12-14]。发展仿形喷雾技术对于实现精准施药,提高农药利用率、降低果园生产成本与环境污染具有重要意义。
该研究对国内外目前存在的果树冠层仿形机构进行综述,分别描述以倒U型、双摇臂式、变喷杆式为主的仿形机构特点,介绍具有上述仿形机构的植保作业整机,同时进一步分析树冠仿形机械当前存在的问题,并对树冠仿形技术的发展予以展望。
1 树冠仿形机构及分析
1.1 倒U型仿形机构倒U型仿形机构由多个连杆铰接而成,其形状与倒“U”相似,该仿形机构在同一平面内有多个旋转自由度,各连杆之间角度变化范围相对较小、仿形精度较高[15]。
张建瓴等[16]首次提出果树仿形喷雾技术,设计出的对称仿形机械臂如图1,各机械臂前后铰接,相邻两机械臂之间通过直流电动机驱动螺旋机构改变仿形机构形状,滑块调节机械臂宽幅,转盘电动机驱动机械臂绕果树180°旋转。通过建立运动方程,计算了在平面内各喷头的工作可达空间,作业空间的数值仿真结果表明基本能完成树冠仿形运动,但上述结论只建立在仿真分析基础上,未得到试验验证。

图1 仿形机械臂Fig.1 Profile robot arm
遇宝俊[17]基于以上研究,在支架与仿形机构上做了较大改进(图2)。改进后的喷雾机可同时对两行果树作业,仿形机构平面自由度较高,水平间距与竖直高度可调,可满足不同形状、行距、高度的果园作业要求。采用ADAMS对其设计的倒“U”型仿形机构进行了动力学及力学参数分析,校验了其仿形机构的作业空间以及各铰链点在运动过程中的受力情况,仿真分析结果与样机试验结果基本吻合,满足其作业空间及强度的设计要求,实际喷雾作业效果未得到验证,且该仿形机构体积较为庞大,没有收缩机构,不方便运输。

注:1.仿形机构;2.机械臂高度调节液压缸; 3.支架折叠液压缸;4.支架横向伸缩液压缸;5.支架。Note:1.Profile mechanism;2.Hydraulic cylinder for working height adjustment;3.Hydraulic cylinder for folding;4.Horizontal telescopic hydraulic cylinder for folding;5.Bracket.图2 倒“U”型仿形机构Fig.2 Inverted U-shaped profiling mechanism
尹翔宇[18]针对此机构设计出了一套基于LabVIEW与单片机的控制系统,以完成对仿形机构的运动控制。但该控制系统只以台架试验验证了其可行性,树冠信号采集问题与在真实作业环境中传感器的干扰问题仍有待解决。
霍鹏[19]设计了一种多段式可折叠仿形喷杆施药装置,该装置各段喷杆前后铰接,可实现折叠、展开和伸缩动作,该装置特点为便于运输存放,质量较轻。并且建立了多段式折叠仿形喷杆动力学模型,分析其动力学特性,求得该装置的关键部件的力学特性曲线及关键几何参数,将参数代入ADAMS与ANSYS分别进行动力学、静力学分析,校验了结构设计的合理性与可行性,通过试验对该装置的运动过程进行验证,结果表明该机构能平稳完成仿形运动。
1.2 变喷杆式仿形机构变喷杆式仿形机构变形范围较大,该机构可以在“一”字型、“U”型、倒“U”型3种状态之间任意转换,“一”字型状态可适用于大田作物,“U”型与倒“U”型可适用于果园、景观树等多种场景,具有一机多用的特点[20]。
张慧春等[21]发明了一种仿形机械臂(图3),该机械臂由3部分组成,包括1个主臂和2个侧臂,均为中空管结构。主臂与两侧臂铰接,通过液压缸调节其夹角在0~90°变化,使得机构在“一”字型与倒“U”型之间进行转换,主臂两侧与侧臂下端均可通过内置电动推杆伸长,实现对不同树冠形状、不同作物的仿形。

注:1.滑块板与主移动臂焊接点;2.第一连杆;3.第一直角连杆; 4,9,11.液压缸; 5.滑块板;6.第二连杆;7.导向滑杆;8.第二直角连杆;10.主臂;12.右移动臂;13,16.侧臂;14.侧移动臂; 15.左移动臂。Note:1.Welding point between slider plate and main moving rod;2.First connecting rod;3.First right angle connecting rod;4,9,11.Hydraulic cylinder;5.Slide block;6.Second connecting rod;7.Guide sliding rod;8.Second right angle connecting rod;10.Main boom;12.Right rod;13,16.Side rod;14.Side moving rod;15.Left moving rod.图3 林木喷雾机仿形机械臂Fig.3 Profiling arm of forest spray machine
李振生[22]基于虚拟样机技术设计了一种可以在喷杆式与隧道式之间相互转换的机构,如图4(a)所示,在中喷杆上设置衔架并安装气缸,侧杆通过气缸伸缩完成变角动作,将左右喷杆错位设计,不仅运输方便,还可使喷杆在非工作状态可沿轴向缩小而减小占用空间。徐幼林等[20]对设计喷杆转换机构的起降运动与变角运动进行了分析,通过建立机构起降、变角运动的运动方程,得到了原动件的角速度与其他构件间的位置、速度、加速度关系,建立机构在静力平衡状态下与原动件关于时间的函数关系,得到该装置的动力学方程并求解,用ADAMS动力学仿真求得机构特征位置的位移、速度、力与力矩特性曲线,其结果与动力学方程求解结果基本吻合,验证了动力学模型的正确性。
随学仕[23]在此机械结构做出改进,如图4(b)所示,将原来用于调节喷杆高度的升降机构换成了由单个液压缸驱动的平行四边形机构,这一改进不仅使喷杆在升降过程中保持竖直状态,还避免了喷杆的前后摆动。此外,侧杆变角部分改为了由液压驱动的曲柄摇杆机构,使得侧杆由原来0~90°角度变化扩大到0~180°,实现喷杆3种状态(喷杆式、隧道式、正U型)之间的切换。原喷杆左右伸缩机构改为了由液压缸驱动的折叠机构,使得运输状态与工作状态之间的切换更加稳定快速。

图4 变换喷杆的研究Fig.4 Study on changing spray bar
张疼[24]设计了一种集喷杆式、隧道式、仿形式于一体的多功能喷杆机构(图5),该装置具有结构轻便、便于运输、一机多用的特点。水平移动液压缸通过右端伸缩改变两门架的水平距离;电动推杆Ⅱ调节喷杆上下旋转完成隧道式与仿形式的切换;电动推杆Ⅰ调节门架两端的推杆实现隧道式与喷杆式的切换;电动推杆Ⅲ调节门架绕竖直轴向的转动以实现喷雾机运输状态与工作状态的变换。该样机的田间试验结果表明,仿形式、隧道式、喷杆式叶面与叶背的药液附着率分别为 60.5%与38.9%、52.2%与37.8%、63.6%与43.6%。在开启气流辅助系统时,雾滴沉积量分别提高了32.1%、26.5%、13.7%。

注:1.喷头; 2.喷杆; 3.水平移动液压油缸; 4.机架固定装置 ;5.固定六方管 ;6.滑动六方管; 7.电动推杆Ⅰ; 8.喷杆机架连接件; 9.电动推杆固定装置 ;10.电动推杆Ⅱ ;11.电动推杆Ⅲ。Note:1.Spray head;2.Spray bar;3.Horizontally moving hydraulic cylinder;4.Frame fixing device;5.Fixed hexagonal tube;6.Sliding hexagonal tube;7.Electric push rod I;8.Spray bar frame connector;9.Electric push rod fixing device;10.Electric push rod Ⅱ;11.Electric push rod Ⅲ. 图5 三位一体多功能喷雾机Fig.5 Trinity multifunctional spray machine
1.3 双摇臂式仿形机构双摇臂式仿形机构则是一种对果树单侧进行仿形的机构,工作时,该机构位于两行果树之间,左右两侧的机械臂分别对行道两侧的果树进行仿形。
李明等[25]设计了一种电动遥控仿形机构(图6)。其上、下导向块与4根支撑杆组成四边活动摇杆机构。下导向块固定在机架上,上导向块与齿条焊接,通过控制电机正反转,带动齿条上下运动,从而带动上导向块上下运动,实现四边活动摇杆机构的开合控制,从而实现仿形功能。该仿形机构喷杆形状变化较为单一,无法完成不同树冠的准确仿形。

注:1.电机;2,3,4.齿轮;5.下导向块;6.支撑杆;7.喷杆;8.齿条;9.上导向块。Note:1.Motor;2,3,4.Gear;5.Lower guide block;6.Support rod;7.Spray bar;8.Rack;9.Upper guide block.图6 电动遥控仿形机构Fig.6 Electric remote control profiling mechanism
李杰[26]设计的风送式仿形喷雾机(图7),通过调节喷杆角度与风机送风角度联合实现仿形喷雾,该装置将喷杆置于风机之前,喷杆上的液压缸用于调节喷杆状态可实现果树顶部的仿形,进一步通过控制电缸的伸缩改变风机的送风角度以改变喷雾方向,并通过正交试验得到了风机的最佳送风参数为送风风速11.78 m/s、送风角度30°、送风距离25 mm,样机试验表明增加送风系统使得雾滴穿透性最大提升了55.8%,叶片正面沉积量最大提升60.2%,试制样机后的试验结果与仿真结果基本吻合。
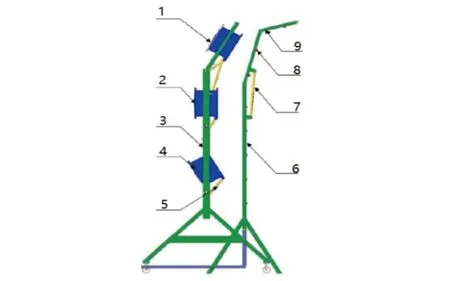
注:1,2,4.轴流风机;3.风机机架;5.风机调角;6.喷杆支架;7.喷杆调角液压缸;8.喷头;9.顶部仿形支架。Note:1,2,4.Axial flow fan;3.Fan frame;5.Angle adjustment of fan;6.Spray bar support;7.Spray rod angle adjusting hydraulic cylinder;8.Nozzle;9.Top profiling support.图7 风送式仿形喷雾机Fig.7 Pneumatic profiling spray machine
房开拓[27]设计了图8(a)所示的仿形喷雾机构,该机构左右两侧完全对称,单侧自由度为3,以右侧机构为例,其主要包括水平调节机构和垂直调节机构。水平调节机构由电机驱动,调节仿形架整体左右移动,以适应不同行距的果树,竖直方向的调节机构由电机驱动,用于调节仿形架整体上下移动,以适应不同高度的果树。水平仿形推杆的伸缩改变连杆的运动状态,实现不同树冠的仿形;通过建立机构的数学模型,采用D-H法得到仿形机构各喷雾点的运动学方程,并利用ADAMS的运动学和动力学分析对机构参数进行优化,综合考虑喷雾点运动空间与受力状况,求得原动件最佳安装位置,使得铰链点最大受力减小了1 282.05 N,喷雾沉积特性试验结果表明,仿形喷雾雾滴覆盖率平均值达43.85%,变异系数平均值26.63%,优于固定喷雾整体雾滴覆盖率平均值29.97%,变异系数平均值39.05%。

注:a中1.仿形架;2.垂直调节机构;3.垂直调节电机;4.水平调节电机;5.水平调节机构;6.仿形推杆;7、8.连杆;9.仿形推杆;b中1.仿形机构模块A;2.仿形机构模块B;3.升降滑动模块;4.仿形支架;5.供液系统;6.电气箱。Note:In a1.Profiling frame;2.Vertical adjustment mechanism;3.Vertical adjustment motor;4.Horizontal adjustment motor;5.Horizontal adjustment mechanism;6.Profiling push rod;7,8.Connecting rod;9.Profiling push rod;In b1.Profiling mechanism module A2.Profiling mechanism module B;3.Lifting sliding module;4.Profiling support;5.Liquid supply system;6.Electric box.图8 双摇臂式仿形机构Fig.8 Double rocker arm profiling mechanism
张慧春等[28]发明了一种树冠表型特征仿形作业臂及其控制方法(图8b),仿形机构模块由液压缸驱动来改变其形状,仿形机构上装有超声波传感器,自动采集超声回波信号并处理获得树木冠层表型特征信息,以此调节喷雾量,以超声波传感器测得的距离信息求得仿形控制量,驱动仿形机构仿形实现对树冠轮廓的自动仿形,升降滑动模块控制仿形机构整体上下移动,适应不同高度的果树。
3种类型仿形机构由于结构及作业原理不同,作业性能差异明显,呈现的优缺点如表1所示。
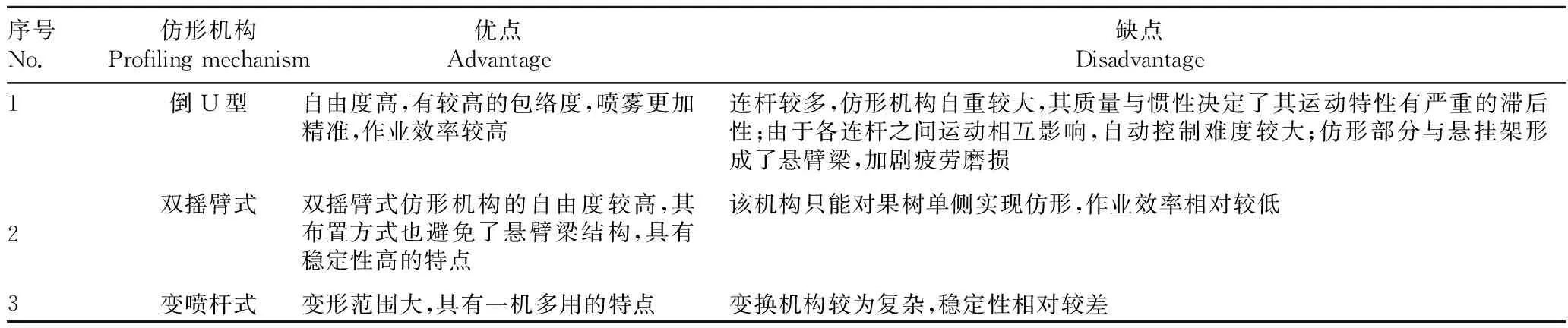
表1 各类型仿形机构优缺点
2 树冠仿形作业机具
随着传感器技术与电子信息技术应用于林业领域,国内外研制出了一些典型的自动仿形作业机具。
房开拓等[29-30]设计了一种针对篱笆型果树的组合圆盘式果树风送喷雾机,采用电动丝杆调节雾化器的上下左右运动,试验结果表明,组合喷雾执行装置完成升降、伸缩和旋转的时间分别为51.3、50.5、26.5 s。刘学串等[31]设计了一种果园宽幅联合仿形修剪机,可根据果树高度、果树形状进行调节,最大切割直径为60 mm,修剪合格率为90.9%。


图9 果园自动仿形喷雾机Fig.9 Orchard automatic profiling spray machine
李龙龙等[34]研制出了一种基于变量喷雾的果树仿形喷雾机(图10),该设备由ZM10000YCE汽油发电机供电,采用激光传感器采集果树冠层信息,基于测得的距离、体积等信息,采用PWM间歇式喷雾技术完成对喷头运动、喷雾流量和风量的调节,实现不同果树的仿形喷雾。在行株距为5 m×2 m 的苹果树试验得到果树左右两侧平均沉积量分别为1.92 和1.37 μL/cm2,雾滴沉积个数大于46.2 个/cm2。

图10 果园自动仿形变量喷雾机Fig.10 Orchard automatic profiling variable spray machine
塔里木大学张德智[35]研制了红枣园喷雾机,该喷雾机最大作业幅宽4 m,最大喷雾高度3 m。仿形喷杆采用PVC管与钢筋,使其具备柔性变形功能与支撑功能,田间试验结果表明,风送式仿形喷雾方式能够有效对矮化密植枣树进行喷雾作业,且较人工喷雾有效节省用药量。
3 存在的问题及建议
发展和应用精准智能施药装备技术是果园植保领域的重要趋势,其中仿形喷雾技术尤为典型,通过综述国内外研究现状,结合当前生产实践情况,归纳制约植保机械智能化提升的主要因素。
(1)农艺无统一标准,果树种植模式分散。果树的建园模式是推广先进植保机械大面积作业的基础,大多数农户在建园初期未考虑到机械化作业方式,使得果树种植模式与植保机械不能有机融合,只能采用传统的植保方式,导致很多先进植保机械无法得到实际应用与推广,从而限制了果园经济的发展[36]。
(2)植保装备智能化技术亟待走出实验室,开展产业化应用。随着计算机技术、传感技术、控制技术及机器视觉技术等的发展,植保作业与上述技术的结合,使得果园植保取得较大的研究进展,但目前大部分相关研究仍处于试验阶段,还无法得到实际应用与推广。
(3)精准施药技术到位率低,未彰显作业优势。由于农户对精准施药信任度不高,认为只有加大农药的喷洒量才能有效防治病虫害,在实际果园作业中,即使应用了精准施药机具,但仍然以“雨淋式”大雾量施药方式为主,减药增效的作业优势无法体现。
基于以上问题,为发展以果树冠层仿形喷药为代表的精准施药技术,进一步推广应用先进智能化施药装备,提出以下几点建议:
(1)政府积极引导,推进标准化果园建设,加速农机与农艺融合。推广应用主干结果型标准化果园种植模式,统一果树的行距、株距以及果树冠层形状等,为先进智能施药装备提供更为结构化的作业环境,使农机与农艺有机融合,提高机具识别、定位、作业精度。
(2)加大人才资金投入力度,不断提升植保机械智能化技术水平。加大果园智能植保机械的科学研发力度,鼓励科技人才投身农业研究,加强高新技术的应用与推广,如静电喷雾、对靶喷雾、变量喷雾技术等。通过人工智能、机器学习等先进算法,提高标靶识别精度,进一步夯实、提升智能植保技术水平。
(3)大力推广以冠层仿形技术为代表的智能施药技术装备,广泛应用于实践生产。为先进植保技术及装备走出实验室提供政策、基层保障,大力宣传仿形喷雾等精准植保技术的作业优势,提高先进植保机具成果转化以及农户购置补贴标准,建立智能植保技术装备示范应用基地,推进产、学、研、用深度融合。
猜你喜欢
农业开发与装备(2022年7期)2023-01-05
农业装备与车辆工程(2022年5期)2022-10-31
中国农机化学报(2022年8期)2022-08-12
农业机械学报(2022年2期)2022-03-14
中小企业管理与科技(2019年3期)2019-03-07
设备管理与维修(2018年15期)2018-11-08
设备管理与维修(2018年8期)2018-08-13
农业知识(2018年45期)2018-01-17
中国核电(2017年1期)2017-05-17
林业机械与木工设备(2017年3期)2017-03-08
