《机器视觉》课程理实一体化教学改革的探索
2023-03-20 07:41刘永王生怀王宸陈诚袁海兵李捷
科技资讯 2023年2期
刘永 王生怀 王宸 陈诚 袁海兵 李捷
(湖北汽车工业学院机械工程学院 湖北十堰 442002)
随着计算机技术和光电技术的进步,机器视觉技术取得了较大的发展,并在汽车、机械、煤炭和冶金等行业有着广泛应用。为了确保机械加工完成的零件质量符合要求,需要对零件基本尺寸以及表面缺陷等特征进行检测。通过视觉设备对被测零件图像进行采集并传输到计算机中的视觉工程应用软件中,设计相关算法完成零件尺寸测量或表面缺陷检测。传统的零件尺寸测量器具有游标卡尺、卡规、螺旋测微仪和三坐标测量仪等,这些测量器具或多或少存在着效率和精度低、工人劳动强度高、不适合大批量测量等问题。传统的零件表面缺陷检测方式主要通过人工完成,效率较低,容易受到测量人员主观因素的影响。《机器视觉》是一门多学科交叉融合课程[1-2],包含机械设计、软件工程、光学和图像处理等课程的核心内容。对机械专业的硕士研究生来说,本科阶段并未学习过相关的专业核心课程,且这些课程内容较为抽象,采用传统的教学方法难以让学生在短时间内理解,学生学习兴趣不高,容易使学生产生厌学心理。
目前,机器视觉技术在各行各业中有着广泛应用,人才需求量巨大,机器视觉人才有着广阔的就业前景。如何培养出具备高水平、高素质且满足市场需求的机器视觉人才是一个有研究价值的课题。该文以齿轮齿距偏差测量为例,阐述了理实一体化的教学方法实施过程,避免了传统课堂教师讲、学生听的教学模式,提高了学生的学习兴趣,使专业知识更加容易理解,取得了较好的教学效果。
1 传统教学模式存在的问题
《机器视觉》课程是一门多学科交叉融合的课程,包括测量系统硬件部分的选型、相机成像原理、数字图像处理技术和软件编程等内容。机器视觉技术不仅可以对零件基本尺寸进行测量,也可以对零件表面缺陷进行检测[3],应用非常广泛。对本科为计算机和通信专业的研究生来说,本科阶段学习了一些核心课程,有一定的基础,学习起来比较轻松。但对本科是机械专业的研究生来说,本科阶段并没有接触过机器视觉相关课程的核心内容,基础较为薄弱,学习起来存在一定困难。在传统的教学模式中主要以教师讲、学生听,教师讲解的内容主要有:测量系统的硬件构成,包括各个硬件的工作原理;采集零件图像后图像的预处理方法和原理;对零件尺寸进行测量设计的相关算法;表面缺陷检测的原理及相关算法等。教授过程中列举教材中实例,如圆直径测量、矩形边长测量、车道线检测和人脸识别等。教学过程中学生以听为主,缺乏动手实践的机会。且由于知识产权等原因,书中的实例很难在课堂上进行复现,学生参与感不强,无法真正理解各部分内容和原理,学生学习的欲望较低,最后导致学生对这门课程丧失兴趣。因此,授课教师需要自行开发一套视觉检测系统[4-6],首先在课堂上介绍测量系统硬件部分的原理及选型。其次介绍一些专业的视觉工程应用软件,如OpenCV和Halcon 等,这些软件需要和硬件设备兼容,由于课堂条件限制,可以选择使用MATLAB软件对图像进行处理,并设计算法完成检测。接着可以将采集到的零件图像发给学生,让学生在携带的笔记本电脑中安装MATLAB软件并导入图像。最后让学生自行完成检测算法并得出检测结果。这样可以让学生体验整个检测过程,增强了参与感,能够真正地理解机器视觉检测的原理,做到了将理论和实践相结合,从而激发出学生浓厚的学习兴趣,有效提高了教学效果。该文以作者指导的硕士研究生设计的齿轮齿距偏差参数视觉测量方法为例,阐述了教学设计的实施过程。
2 教学改革实施过程
2.1 机器视觉测量系统硬件介绍
图1是购买的某公司视觉检测实验设备原理图。
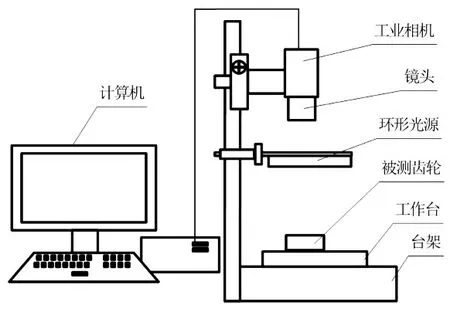
图1 视觉检测实验设备原理图
硬件部分讲解在实验室完成,对着实验设备讲解各个部分的工作原理。讲解相机和镜头时,介绍CCD相机和CMOS相机各自存在的优缺点,镜头的成像原理,畸变产生的原因及焦距、成像尺寸、分辨率、光圈(通光量)、工作距离、视角等参数的含义和相互关系。相机通过螺栓安装在支架上,位置和高度可通过滑轨和手轮进行调节,支架可移动。讲解光源时介绍环形光源的优点,分析视觉测量系统中常见的3种光照方式以及优缺点。环形光源的高度和亮度也是可以调节的。让学生动手调节镜头的位置、焦距及光源的亮度,使其能清楚地感受到各个因素对齿轮图像清晰度的影响,获取清楚的齿轮图像是后续准确测量齿轮参数的前提条件。讲解工作台时,介绍工作台由步进电机带动旋转的工作原理,步进电机经过细分驱动器可以细分步距角,步距角大小可以调节,让学生多次调整工作台旋转角度,参考相机视野水平线,保证齿轮中心与相机中心重合。讲解图像采集卡时可以打开机箱让学生近距离观察其形状和连接方式,选择图像采集卡时需要考虑与相机之间的匹配度。当选择连续采集模式时,需要图像采集卡的存储空间足够大,也可以选择能对图像进行压缩的图像采集卡。工作台安装有传感器,当零件转动经过传感器时,给出电信号触发相机进行图像采集,在生产线上可以实现自动采集。使用OpenCV软件给学生演示整个测量过程并让学生自己操作测量软件,让其直观地感受整个操作流程和测量方法。最后给学生介绍测量系统在生产线上的应用,使用分拣机构将不合格的齿轮进行剔除,将合格的齿轮传送到下一个工位,可以加强学生对测量系统实际应用的理解。
2.2 齿轮齿距偏差参数视觉测量教学设计实施
被测齿轮实物图如图2所示。

图2 被测齿轮实物图
讲解测量系统的常用的标定元件:量块、圆形标定板及棋盘格标定板,让学生了解各种标定元件的材质、精度和使用方法。选择长度尺寸和齿轮大小接近的标定板进行标定,在测量之前让学生拍摄20张棋盘格标定板图像,将其导入MATLAB 图像处理工具箱中对相机参数属性进行标定,并调用相关函数对图像进行矫正,消除畸变的影响,让学生直观地感受镜头畸变对图像产生影响。矫正完图像后向学生展示像素当量的标定过程,选择圆形标定板对像素当量进行标定,选择圆形标定板4个顶点和中心点共5个圆点,提取5个圆点的亚像素边缘,利用最小二乘法拟合得到5 个圆直径值,计算得到5个像素当量,最后求其均值得到最终的像素当量,让学生了解实际尺寸和像素尺寸的比例关系。在测量之前验证测量系统的重复性精度,使用标定像素当量的5个圆点的圆心坐标,进行10次测量,采用贝塞尔公式得到其标准差和不确定度,通过标准差和不确定度让学生直观地了解测量系统的稳定性。
图像的预处理和参数测量算法使用MATLAB 软件完成。在课堂上先给学生讲解各种预处理方法的原理,讲解完成后让学生在课堂上练习,理论和实操相结合,使学生对整个课程产生浓厚的兴趣,提高其学习积极性。图像的预处理包括灰度化、滤波去噪、二值化、形态学处理和边缘检测等。首先选择灰度转换函数将采集到的RGB图像转换为灰度图,其次让学生选择中值滤波、高斯滤波和均值滤波对图像滤除噪声,对比各种滤波方式的效果。接着采用Otsu算法对阈值进行选取,将图像转换为二值图像。然后让学生选择Canny算子、Robert 算子、Log 算子和Prewitt 算子等像素级边缘检测算子和Zernike 矩亚像素级边缘检测算子提取齿轮轮廓边缘,比较像素级和亚像素级边缘检测算子检测效果的不同,让学生直观地感受像素和亚像素之间的区别。最后调用边界跟踪函数获取齿轮轮廓边缘点坐标,为后续设计算法测量相关参数做好了准备。边界跟踪图像见图3。
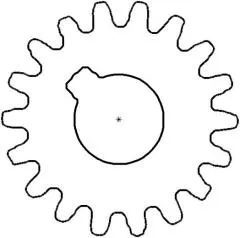
图3 边界跟踪图像
讲解测量算法之前将学生分为若干组,提示编程思路后让每组学生在下次上课时展示自己的测量结果并进行讨论。齿轮中心点是测量其他参数的基准,选择Hough变换和最小二乘法对齿轮中心点坐标和中心孔半径进行测量,让学生对比两种方法的准确性。计算所有齿廓边缘点到安装孔中心点的距离值,分别提取其中最大、最小各50个值,计算其平均值得到齿顶、齿根圆半径。测量齿数时绘制齿廓边缘点到安装孔中心点距离值的曲线分布图,选取齿顶圆与齿根圆半径值之和的均值,在曲线图中对应高度绘制一条直线,由于一个齿廓与直线存在两个交点,所以统计交点的个数即可得到齿数。根据模数、齿数和齿顶圆半径之间的关系计算出模数和分度圆直径。在上述齿廓边缘点到安装孔中心点距离值的曲线分布图以分度圆半径为高度绘制一条直线,利用交点信息可以得到分度圆与齿廓边缘点曲线的交点坐标,根据交点坐标通过公式计算出单个齿距偏差、k个齿距累计偏差、齿距累计总偏差。上述编程过程对部分学生来说可能较为困难,可以通过小组合作以及教师指导等方式完成程序编程,最终实现齿轮齿距偏差参数的测量。齿距偏差测量示意图见图4。

图4 齿距偏差测量示意图
3 结语
采用理实一体化的教学方式教授《机器视觉》这门课程,让机械专业研究生能够更好地理解课程内涵,提高了学习研究的兴趣,锻炼了实践能力和创新意识。从近几届研究生教学评价来看效果较好,后续会增加缺陷检测等案例,让学生深层次地掌握机器视觉的专业知识并初步具备开发工程应用案例的能力。
猜你喜欢
内燃机工程(2021年6期)2021-12-10
汽车维修与保养(2020年11期)2020-06-09
少儿科学周刊·少年版(2020年9期)2020-03-04
少儿科学周刊·少年版(2020年9期)2020-03-04
制造技术与机床(2017年3期)2017-06-23
中国惯性技术学报(2017年1期)2017-06-09
科教导刊(2016年25期)2016-11-15
光学精密工程(2016年3期)2016-11-07
软件工程(2016年8期)2016-10-25
科技视界(2016年20期)2016-09-29