
助力转向对EMS 系统怠速控制的影响
2023-03-29 09:38冯华帅芦英杰麦卫平麦卫平叶才盛
时代汽车 2023年7期
冯华帅 芦英杰 麦卫平 麦卫平 叶才盛
上汽通用五菱汽车股份有限公司 广西柳州市 545007
1 引言
EMS 发动机控制系统能够在怠速工况实现目标转速的平稳控制,完全暖机后目标怠速一般设定在750±50rpm,开启空调后则会相应的提高到800±50rpm,防止未知负载如突然打开大灯、转动方向盘、开启雨刮负载等突然的施加造成发动机熄火,引起售后市场问题。虽然提高静态目标怠速能够有效规避发动机熄火问题,但是附带会引起NVH 问题,主观感受受到影响。随着电气化、智能化的推动,目前整车集成更多的是采用电机助力系统EPS(Electornic Power Steering),通过电机的辅助能够让驾驶员轻松方便的控制方向盘的转动,助力电机由蓄电池或者发电机提供电压,通常来说发电机通过皮带与发动机直接连接,是一种未知的外加负载,当EPS 工作的时候,发动机转速控制也会受到影响。所以,就如何在有限的目标怠速阀值范围内实现精准的EMS 怠速控制提出了挑战性。文本结合整车项目开发经验,分析和助力转向对怠速控制的影响的解读,提出了一些工程改进方案和改进前后的测试结果,以提供工程借鉴和参考。
2 理论分析
2.1 怠速控制
为了满足整车不同控制模块之间的架构需求,通常定义以扭矩为接口进行控制需求和干预上的交互,所以,在架构平台化的基础上,EMS 控制系统中的怠速控制也会通过扭矩结构来实现。(在整车上,不同的控制模块之间的通讯通常是通过CAN 总线发送通讯信号,发送方发送指令给接收方,接收方进行响应作出动作,常用的通讯信号有标志位、有转速请求值、还有扭矩请求值,这些设计理念是为了更好的实现整车平台化)EMS 控制系统实现怠速控制的时候一般会设定一个随着发动机水温变化而变化的目标转速,使发动机输出力矩(扭矩)和阻力力矩的达到一种平衡的状态,这是一个可以标定的Map,一般结合台架试验数据进行理论计算后可以得到。然而实际的阻力力矩如泵气损失、机械损失、液力变矩器的泵轮损失等往往会随着未知的外界因素变化,所以怠速控制中一般还包含PID 调节,使怠速控制围绕着目标转速在一定阀值范围内波动,如下图1 所示。同时,为了控制上调节的更合理,在实际工程应用中通常EMS 系统中还包含PID 控制因子自学习的逻辑,控制较慢的时候,PID 参数会逐渐变大,以使收敛到目标怠速值的速度更快,从而不引起驾驶感知的过差。然而,这种自学习的方式当系统存在故障模式时会带入一些问题,工程上称之为学习不合理,出现这种情况时,会导致控制系统严重偏离控制目标怠速值,这个时候为了解决这种风险,则需要引入学习边界、学习时常、学习死区等防冗余逻辑,以规避自学习值过大或者过小,引起失控。

图1 系统怠速控制示意图
PID 调节原理如下,由于D 项对于噪声的调控较为灵敏,对于EMS 怠速控制系统来说通常只有PI 部分的调控。
其中,e(t)是系统偏差,即控制误差,u(t)是被控制对应的控制输出偏移量,t 是时间,Kp、KI、Kd分别为P 项、I 项、D 项控制因子,是一个可以标定的部分。
2.2 扭矩补偿
由于PID 控制是一种通过控制偏差反馈回系统进而补救的一种理论,在实际工程环境下,即使EMS 控制系统引入了PID 控制也会导致控制上的迟滞,甚至有可能会出现失控的情况。为了规避这种风险,EMS 控制系统引入另一种反馈的控制方式,即扭矩补偿。其目的除了可以防止发动机熄火,还可以避免由于系统偏差过大导致的PID 控制因子学习过大。补偿扭矩通常会根据上一轮的控制表现或者CAN 总线的触发信号,根据设定提前给多一点输出扭矩,当外界负载突然变化的时候发动机转速才不会有过大的转速掉坑,但是也不能过早的补偿扭矩,否则会引起较大的转速鼓包现象,有些EMS 控制系统在设计上会更加的灵活,比如会加入扭矩补偿的自学习,当系统发现初始设定的扭矩补偿值在某一次的突加负载下不足以保持控制目标稳定的话,便会增加扭矩补偿值,即在基础值上增加一个偏移值,在用于抵御下一次的突加负载,同时为了避免多余的扭矩补偿,还会限定补偿的边界、补偿随时间的衰减系数等等。扭矩补偿的基本原理如图2 所示。另外,还需要注意的是,在扭矩补偿过程时的数值不宜设定过大,还会影响发动机燃油经济性。扭矩补偿与储备扭矩的本质区别在于激活方式的不一样,其实现的原理都是EMS 控制系统在进气、喷油、点火上的灵活实现。

图2 PID参数自学习逻辑示意图

图3 EMS控制系统扭矩补偿示意图
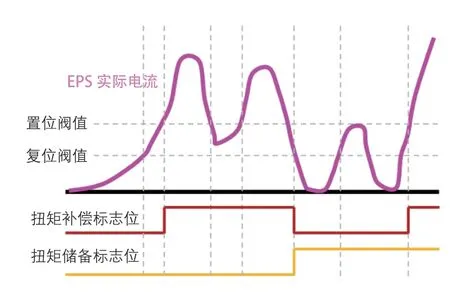
图4 EPS负载标志位作动示意图
2.3 助力转向系统
助力转向系统(又称EPS)一般由助力电机、EPS 控制模块、扭矩传感器、减速器等组成,在转向过程中,方向盘信号作用输入给EPS 控制模块后,由控制模块根据工况前馈实时输出电机电流,再根据检测到的电压反馈值实时对摩擦、阻尼、弹簧回位、车轮惯性等进行修正,所以方向盘转动角度和EPS 电机电流变化的不完全是线性关系,这种关系的迟滞性可以通过EPS 控制模块采集到的反馈电流后通过CAN 信号发给EMS 控制模块,进而达到对目标怠速的精准控制。一般来说,可以用如下关系来表示EPS 工作状态(EPS 负荷)发到CAN 总线的信号:
1>EPS 电机工作电流上升过程中≥15A时,CAN 总线相关标志位置位
2>EPS 电机工作电流下降过程中≤10A时,CAN 总线相关标志位不置位
3 控制策略
当EMS 控制系统中收到EPS 工作状态标志后,发动机的输出扭矩就可以开始补偿,扭矩补偿的方式主要分为如下两种方式来加载。需要注意的是,在扭矩补偿的过程中,怠速PID 调节也是实时参与控制的,扭矩补偿值过大会引起发动机转速变化过大,进而影响PID 参数自学习过程。
3.1 静态扭矩补偿
当EPS 工作状态置位后,EMS 控制系统会根据设定好的静态扭矩补偿数值直接加载扭矩,是一种扭矩多补偿和立即执行的概念,一般通过点火角前推实现。这是因为考虑到车辆散差以及不确定因素如温度、湿度的影响导致发动机负载过大,防止导致发动机熄火。当EPS 工作状态不置位的时候或者超过一定标定时间后,静态扭矩补偿会立刻去除,防止EPS 工作状态的错误发送导致的发动机转速鼓包甚至飞车现象。
3.2 动态扭矩补偿
当EPS 电机转动起来后,动态扭矩加载过程实际是一种衰减的概念,这是因为由于电机负载的特性,电机最初转动起来需要克服的静摩擦力要比动摩擦更大,所以电机负载阻力是一个先大后小的关系。引入动态衰减的概念,能够实现扭矩平稳的过渡,从而发动机转速不会产生过大的偏移。
实际上这两种方式扭矩补偿的方式可以根据EPS 电机散差灵活运用,通过标定手段选择单一逻辑或者两者一起使用,如下图5所示。

图5 EMS扭矩补偿逻辑示意图
4 试验结果
对五菱某款车型测试在怠速下突然转动方向盘的情况,试验设备及测试点布置如图6,图7 所示。测试结果显示,当转动方向盘时,由于EPS 电机工作状态置位不合理,实际负载作用时未置位,导致发动机转速有凹坑,如下图8 所示。增加及改进EPS 负载标志位作动的电流阀值后,怠速工况下即使遇到方向盘突然转动所带来的突加未知负载,发动机实际转速仍然能够很好的控制在目标转速附近,如下图9 所示。另外,结合工程经验,以发动机转速开始掉坑到转速谷底的时间宽度1/3 处对应的电流值为基准,调整为EPS电机工作状态置位电流阀值,依次反复缩短时间轴和电流基准值,最终确定调整EPS 电机工作状态置位的电流阀值大小,同时结合静态动态扭矩补偿的加载方式,能够优化目标转速稳定控制。

图6 电流试验测试设备

图7 电流测试点示意图

图8 改进前怠速测试结果图
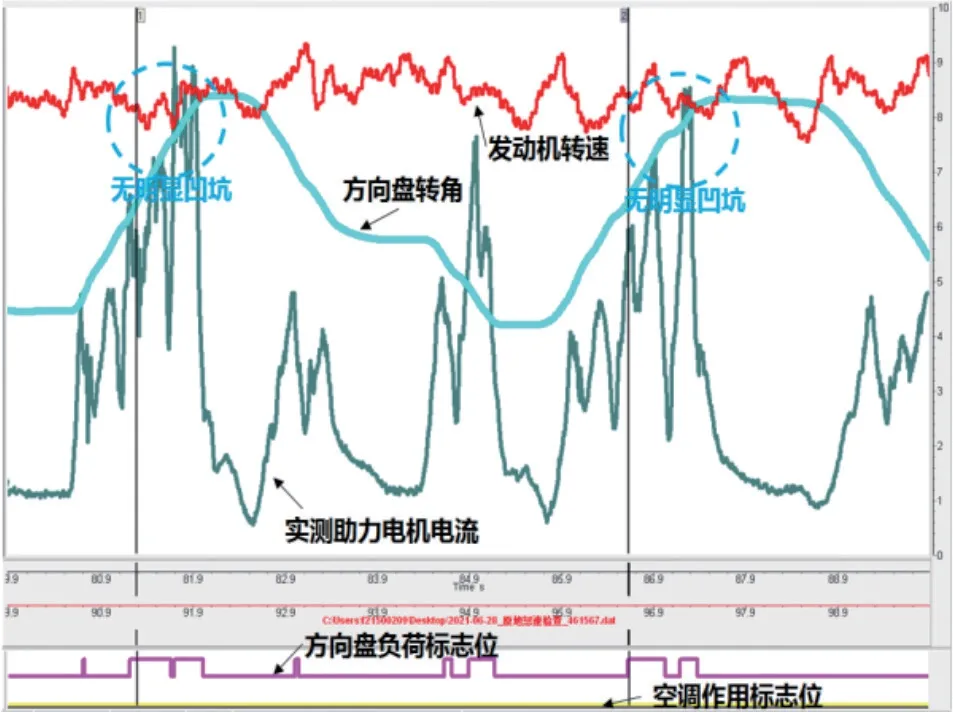
图9 改进后怠速测试结果图
5 结语
本文分析了助力转向对怠速控制影响的关键是如何让EMS 系统准确识别这种未知的外加负载,从而防止出现发动机转速的掉坑或鼓包的现象。一种可取的方式是可以通过在CAN 总线上发送EPS 电机工作状态标志位,EMS 系统识别到该标志位后进行扭矩上的补偿,而其实施难点是需要通过实验的方式确定EPS 电机工作电流与实际负载加载的真实关系。电流阀值的确定需要通过多样本的采样点,有必要的话电流阀值可以放得更宽以考虑不同样本之间的散差。另外本文通过对EMS 怠速控制的原理进行了解析,PID参数自学习的原理和存在的风险,还提出了结合静态和动态扭矩补偿加载方式,可以更有效和灵活的去克服怠速控制过程中的未知负载。
猜你喜欢
英语世界(2022年9期)2022-10-18
中国煤层气(2021年5期)2021-03-02
金桥(2020年9期)2020-10-27
中学生数理化(高中版.高考理化)(2020年3期)2020-05-30
传感器世界(2019年6期)2019-09-17
西部交通科技(2018年2期)2018-06-14
北京航空航天大学学报(2017年5期)2017-11-23
凿岩机械气动工具(2017年3期)2017-11-22
商周刊(2017年17期)2017-09-08
电子产品可靠性与环境试验(2016年6期)2016-05-17
