
消费型无人机在复杂区域三维重建精度验证
2023-04-06 10:22刘飞鹏
北京测绘 2023年2期
刘飞鹏
(江西核工业测绘院集团有限公司, 江西 南昌 330199)
0 引言
近年来,实景三维(three-dimensional,3D)模型应用领域越来越广泛,包括数字城市[1]、城市规划[2]、国土资源[3]和文化遗产[4]等邻域。消费型无人机(unmanned aerial vehicle,UAV)倾斜摄影测量技术,通过自动或半自动化处理影像数据后可生成具有真实坐标、可供量测的实景三维模型,减少人工投入、降低成本[5-6]。
由于无人机受到外界因素影响,导致飞行姿态不稳定,获取数据难以满足精度要求,在地形复杂情况下表现突出。相关学者从数据获取、数据处理等不同方面改进作业流程,以提高数据精度。盛辉等提出复杂区域倾斜摄影的航线规划方法,通过合理规划航线避免由于建筑物遮挡导致获取数据存在漏洞问题[7]。陈仁朋等提出序列无人机影像的精细化三维模型精度评估方法,该方法通过多个不同的影像畸变模型组合,迭代处理影像畸变直到影像畸变系数稳定[8]。张春森等针对消费型无人机难以保持匀速飞行,提出曝光延迟的光束法区域网平差方法,通过引入曝光延迟模型消除由于无人机飞行速度不稳定导致空三精度低于理论精度问题[9]。巩丹超等提出线性特征约束的建筑物密集匹配方法,通过影像边缘直线特征约束全局能量计算,能够有效地保留建筑物边界同时估计建筑物附近地形地貌[10];张春森等提出基于多个原则剔除多余影像数据,并自动建立建筑物侧面与多视影像最优纹理选择关系[11]。上述方法,分别从倾斜影像数据获取、影像畸变纠正、平差处理、密集匹配以及纹理映射等单一关键环节进行改进,获取精度提升有限。
针对消费型无人机在复杂区域三维重建精度难以保证问题,本文采用消费型无人机飞马D2000搭载高精度定位、定姿仪器获取多视影像数据,通过多视影像畸变纠正消除多视影像畸变误差;然后,结合多视影像连接点提取与带有相对姿态参数的光束法区域网平差方法解算影像精确的姿态数据与加密点坐标;最后,通过外业点验证消费型无人机在复杂区域三维重建的精度。该方法可有效减少外业像控测量点数量,同时满足项目精度要求。
1 消费型无人机在复杂区域三维重建关键技术
1.1 影像畸变改正
数码相机在镜头加工、安装以及成像环境导致摄影时刻获取影像与设计理论点位存在畸变误差,通常需进行畸变改正处理。常用的畸变参数纠正模型,利用简单的物镜径向畸变、切向畸变与相机内方位元素表示,畸变参数纠正模型[12]如式(1)所示。
(1)
其中,ki,i=1,2,3表示镜头径向畸变系数;p1、p2表示镜头偏向参数;r表示像点与像主点距离。
由于畸变参数模型难以改正普通数码相机的影像畸变误差,文中采用畸变参数模型与格网畸变结合的方式对多视影像数据进行畸变处理。该方法首先需要建立数码相机影像纠正格网,然后对每个小格网计算畸变参数模型,格网内像素的畸变参数利用格网畸变参数计算得到,通过逐个格网参数计算,生成整个数码相机影像畸变改正信息,保障后期测绘的高精度。
1.2 多视空三处理
利用飞行平台上搭载高精度的全球导航卫星系统(global navigation satellite system,GNSS)与惯性测量单元接收机,获取高精度位置、姿态(position and orientation system,POS)数据可近似获取影像高精度外方位元素,进而建立多视影像数据间相对空间位置关系[13]。首先,利用归一化相关系数结合最小二乘的影像匹配方法进行匹配获取下视影像间同名点坐标;然后,将下视影像前方交会获取像点对应的物方空间坐标,结合影像畸变参数、高精度POS数据,依据共线方程原理将物方坐标反投影到待匹配的倾斜影像上,获取待匹配点的初始位置;最后,利用影像间初始几何关系及影像核线关系进行多策略约束获取多视影像初始同名特征点[14];对于匹配点集中存在的误匹配点数据,通过5点法相对定向模型采用随机采样一致性方法估算多视影像间对应关系,并剔除粗差较大的点,对于多余2度的重叠点数据,通过两两前方交会的方式,进一步剔除物方残差较大的像方点坐标,获取最终多视影像同名点集。
多视影像光束法区域网平差是一种严密的平差方法,但该方法需要解算的未知参数过多,导致出现求解参数不稳定问题。考虑多视镜头在短时间内安装参数相对稳定,可以仅考虑曝光时刻下视影像姿态数据参与平差,大大减少待求未知参数[15]。
利用多视影像下视姿态参数、侧视影像相对下视影像相对姿态参数以及多视影像连接点坐标,通过带有相对姿态参数的光束法区域网平差方法进行多视影像平差处理,生成精确的外方位元素与加密点物方空间坐标。
1.3 纹理映射
对于多视密集匹配生成密集点云数据需要进行纹理自动映射处理,获取最终的实景三维模型结果。纹理映射需要建立三维坐标点(x,y,z)与二维多视影像坐标点(u,v)间数学关系,纹理映射目标建立三维区域的二维影像参数模型,将隐式方程转化为参数方程可以表示为
(3)
通过式(3)获取的映射关系可以简化为
(x,y,z)⟺(m,n)⟺(u,v)
(4)
通过一个或多个范围[0,1]的参数获取二维影像与三维模型间的映射关系,获取三维点云数据对应纹理影像,最终生成实景三维模型。
2 工程实验
2.1 项目概况
为了验证消费型无人机在复杂区域三维重建精度,本文选取位于云贵高原上某自然风景区,面积约为3.56 km2,测区地形起伏大,整体为山地地形,最高点海拔约2 515 m,最低点海拔约350 m,测区地形高差变化在2 200 m左右,其中,测区中部主峰为典型的喀斯特地貌,主峰垂直高差达百米;峰林间落差300~400 m,测区植被覆盖面积广,天气变化较大。由于测区植被覆盖率高,像控点只能沿景区硬化路面布设,导致像控不能覆盖全区。采用实时动态差技术(real-time kinematic,RTK)采集外业点12个,其中6个用于空三控制点,其余为检查点。
2.2 数据获取
由于测区地形起伏较大,为获取全区分辨率优于4 cm,峰顶处分辨率优于3 cm的倾斜影像,避免分辨率相差较大影响空三及三维实景模型精度;考虑地形高差、山脊线、起飞降落点等因素,最终将测区划分5个区域,并在航飞时保证各分区间重叠度大于70 m。在5个航飞分区内分别利用事先获取的精确数字高程模型数据,采用仿地飞行,获取多视影像数据约18 000张。同时,为了保证建筑物基顶部高差精度小于等于15 cm,建筑物其他平面特征平面精度小于30 cm,本项目对测区中心位置增设了一架次的航线,具体分区情况,如图1所示。

图1 测区划分
2.3 数据处理
由于测区天气多变,获取无人机影像数据存在雾霾及色调不均情况,此外相机的畸变也会引起相对定向误差过大,从而影响空三精度,甚至导致空三平差无法进行,因此需进行影像匀光、匀色及去畸变。D2000配置高精度差分GNSS板卡,同时标配网络RTK解算服务,支持高精度POS辅助空三。由于采用多个分区获取多视影像数据,首先对不同区域影像分别进行自由网的光束法区域网平差处理,确保区域内部多视影像误差分布一致;然后,将所有影像合并为一个区域网,并在不同区域接边处手动添加连接点坐标,确保不同区域间连接误差满足指标要求;最后,引入像控点数据进行绝对定向处理。多视影像区域网平差效果,如图2所示。
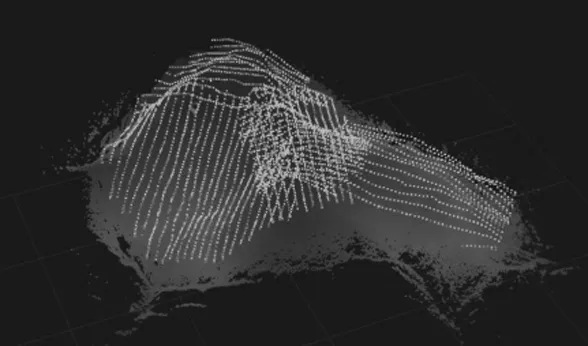
图2 空三成果
在满足空三精度指标后,利用瞰景Smart3D软件进行多视影像密集匹配、三维不规则三角网(triangulated irregular network,TIN)网格构建、创建三维模型白模和纹理自动映射等,生成的实景三维模型成果。由于影像数据多为复杂纹理,特征匹配较为困难,此外山间狭窄缝隙、阴暗面和树林茂密处点云匹配错误率较高,易造成模型三角面破损和纹理拉花,因此需要对三维模型进行修饰,最终生成实景三维效果,如图3所示。

图3 实景三维模型成
2.4 精度验证
多视影像数据空三结束后,为了确保空三精度满足规范要求,利用外业像控点数据、检查点数据进行空三精度验证,具体计算每个外业点X、Y、Z三个方向误差,并统计每个方向的中误差以及最大误差。具体空三精度统计结果见表1,由表1可知,控制点数据X方向最大误差为0.036 m、中误差为0.029 m,Y方向最大误差为0.023 m、中误差为0.017 m,高程方向最大误差为0.019 m、中误差为0.015 m,符合《数字航空摄影测量空中三角测量规范》[16]国家标准要求。检查点数据X方向最大误差为0.067 m、中误差为0.046 m,Y方向最大误差为0.061 m、中误差为0.041 m,高程方向最大误差为0.073 m、中误差为0.057 m,符合《数字航空摄影测量空中三角测量规范》国家标准要求。
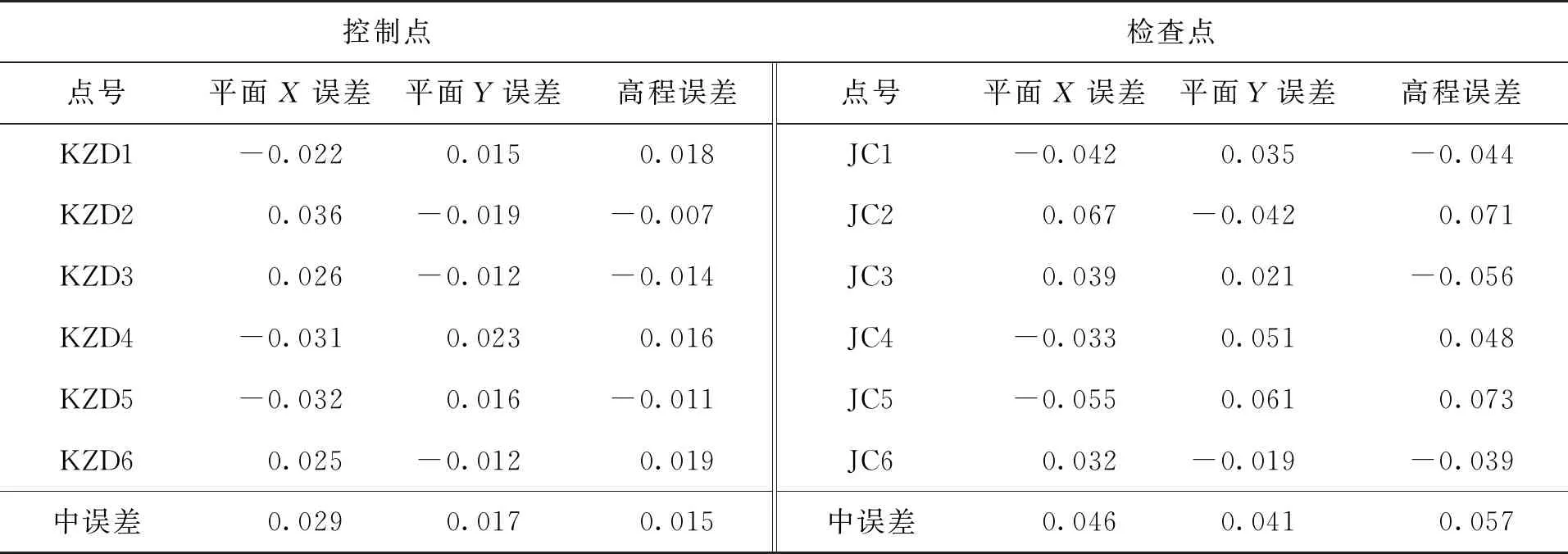
表1 空三精度检查 单位:m
实景三维模型的平面精度和高程精度评定,将实地测量的控制点量测坐标与模型上对应控制点的模型坐标进行对比见表2。由表2可知,三维模型精度X方向最大误差为0.125 m、中误差为0.075 m,Y方向最大误差为0.091 m、中误差为0.059 m,高程H方向最大误差为0.094 m、中误差为0.074 m,并且每个方向上误差分布不存在过大误差,满足《三维地理信息模型数据规范》[17]规范要求。
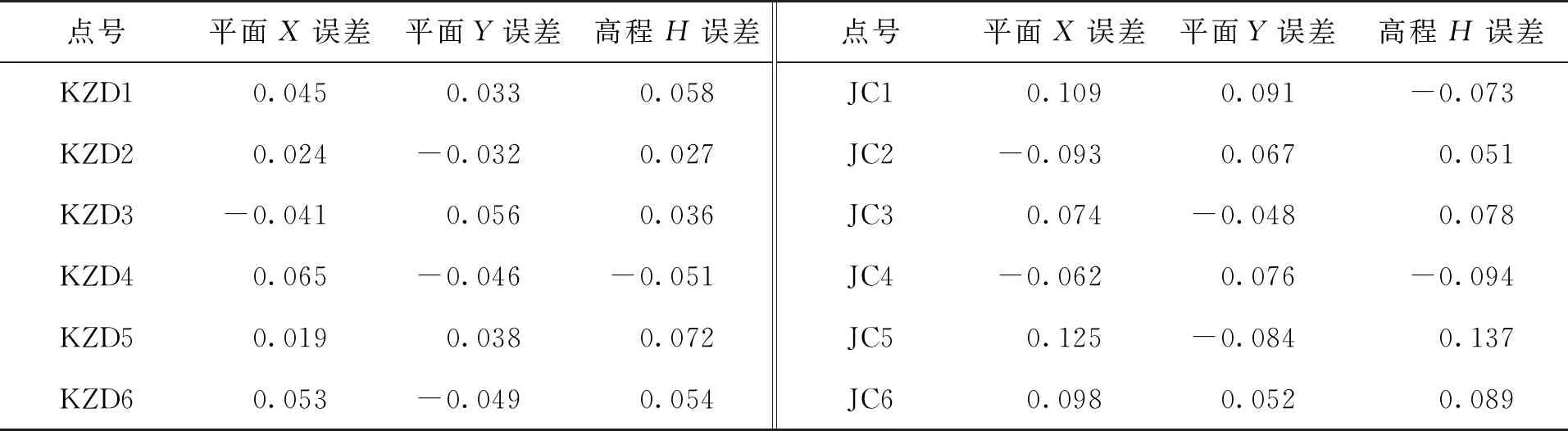
表2 模型精度统计 单位:m
3 结束语
本项目借助飞马D2000无人机搭载D-op3000相机,采用差分GNSS技术,解算获取高精度POS数据,经过多视影像畸变改正以及附有相对姿态参数的光束法区域网平差解算,生成多视影像高精度的姿态数据,利用瞰景Smart3D软件多视密集匹配与纹理映射模块生成高精度三维实景模型。通过该设备在山区复杂地形测区中的应用,验证消费型无人机在复杂区域三维重建可行性,为相关工程应用提供参考。
猜你喜欢
江苏安全生产(2022年5期)2022-06-16
华人时刊(2021年23期)2021-03-08
理论与创新(2020年15期)2020-10-09
辽宁省博物馆馆刊(2020年0期)2020-08-13
企业科技与发展(2018年5期)2018-09-10
摄影之友(影像视觉)(2017年10期)2017-11-07
北方音乐(2017年4期)2017-05-04
癌变·畸变·突变(2014年2期)2014-03-01
测绘科学与工程(2014年2期)2014-02-27
癌变·畸变·突变(2014年6期)2014-02-27
