
可穿戴式三维激光扫描系统在大比例尺测图中的应用
2023-04-06 10:10邱世聪陈远鸿汪国宏雷远建
北京测绘 2023年2期
邱世聪 陈远鸿 汪国宏 雷远建
(深圳市勘察研究院有限公司, 广东 深圳 518000)
0 引言
随着同步定位与地图构建(simultaneous localization and mapping,SLAM)技术的快速发展,背包式的三维(three-dimensional,3D)激光扫描系统日趋成熟,从背包式发展到可穿戴式,无须全球导航卫星系统(global navigation satellite system,GNSS)的支持就能实时获取周边地物的高精度三维点云数据及影像信息[1]。由于无人机航空摄影测量具有效率高、生产成本低等优点,同时也存在成图精度相对较低、受环境影响较大、空中飞行安全性低等缺点,目前在实际大比例尺测图生产中,主要还是以GNSS-RTK测量和全站仪全野外数据采集等传统测量手段为主,其中,RTK是指实时动态载波相位差分技术(real-time kinematic)。传统测量对仪器、人员等方面要求较高,同时还受地形条件、通视条件、卫星信号等外界因素影响较大,费时费力,通过移动三维激光扫描系统快速获取三维空间信息能大大减少外业工作量,获取高精度的成果的同时提高了生产效率[2-3]。可穿戴式三维激光扫描系统不同于机载、车载测量系统,由外业数据采集人员承载进行测量,可应对复杂的测量环境[4]。三维激光扫描系统主要分为激光测距系统、控制系统、显示系统、数据传输系统和电源供应系统5部分构成,其核心是激光发射器、激光反射镜、激光自适应聚焦控制单元、电荷耦合器件(charge coupled device, CCD)技术和光机电自动传感装置[5]。
可穿戴式三维激光扫描系统作为新兴的测绘设备,目前在国内外的应用研究还处于起步阶段,相关的应用研究较少。李照永等[2]研究了背包式三维激光扫描系统的pure SlAM和fused SLAM作业方法共4种模式在轨道交通工程竣工测量中的应用,分析出实现快速的、高精度的点云数据获取的最佳作业方法及模式为pure SlAM。杨铭[6]研究了3种背包式扫描仪数据采集精度和效率。
本文利用NavVis VLX可穿戴式三维激光扫描系统对某公寓小区进行比例尺为1∶500的测图实验,并将三维激光扫描系统测图成果与全站仪测图成果进行对比分析。
1 可穿戴式移动三维激光扫描系统
NavVis VLX是一款可穿戴式移动三维激光扫描系统,VLX通过两个多层激光雷达和四个工业相机快速捕获360°高分辨率图像和高精度点云,如图1所示。它使用NavVis专有的6D及时定位和地图创建(SLAM)技术进行高质量的现实空间数据捕获,紧凑的设计使其非常适合在有障碍物和不平的地面以及狭窄空间中使用。在实际工程应用中,需将采集到的原始点云数据进行整体配准转换到工程坐标系中以提高数据精度[7-8],此系统具有添加控制点功能,控制点可以提高数据的准确性,实现多个数据集的自动拼接,并能够将点云坐标自动转换到测量工程测量坐标系下。

图1 NavVis VLX
2 数据采集及内业数据处理
2.1 试验区选择
本文选取深圳市某小区,此小区涵盖常规大比例尺地形图需测的大部分地理要素,具有一定的代表性[9]。
2.2 控制测量
本文利用深圳市北斗地基增强系统(SZBDCORS)建立一级首级控制网,每隔25 m加密一个控制点,采用全站仪对加密控制点进行施测,得到各控制点的高精度三维坐标。
2.3 外业数据采集
作业前校准加速度计,扫描时以缓慢而稳定的速度行走,并保证VLX尽可能保持直立,避免突然或急促的动作,尽量距离被扫描地物1~10 m以获取最佳质量的点云。由于整个点云数据量较大,在立体采集的过程中,特别是杆状地物会相互遮挡,因此,将杆状地物、线状地物及面状地物分开采集,可以保证地物完整采集[10]。对于树林等不易到达的区域及需重点扫描的地物,加长数据采集时间,绕着重点地物多次进行扫描,确保获得完整的点云数据。经过控制点,通过扫描仪的添加锚点功能进行控制点的添加。
2.4 内业数据处理及数字成图
将外业扫描数据导出,采用配套软件SiteMaker对扫描数据做预处理,处理内容包括解算点云、去噪、点云着色、生成全景照片,所有数据集通过控制点自动拼接,点云处理成果如图2所示。采用Autodesk ReCap将LAS点云格式转换成南方CASS 10.1支持的PCG点云格式,利用CASS 10.1进行数字成图。

图2 彩色点云数据
3 精度对比分析
随机选取均匀分布、特征明显的特征点、特征边,并采用高精度全站仪进行实测[17],将扫描仪成果与全站仪实测成果精度对比分析。
选取35个点位进行平面点位精度分析,经计算最小较差为1.5 cm,最大较差为12.5 cm,平面点位中误差为6.5 cm,平面点位较差分布如图3所示。
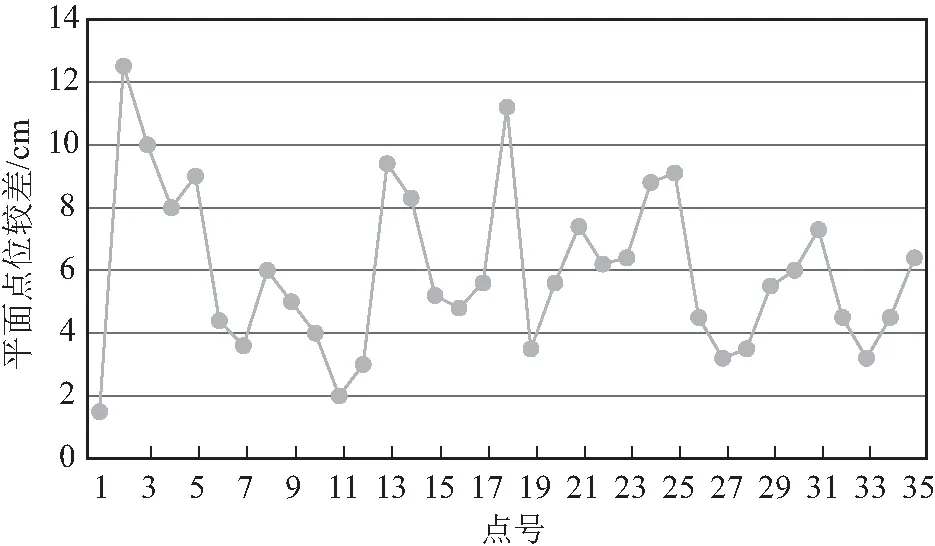
图3 平面点位较差分布
选取40个高程点进行高程精度分析,经计算最小较差为0.8 cm,最大较差为11.2 cm,高程中误差为7.7 cm,高程较差分布如图4所示。
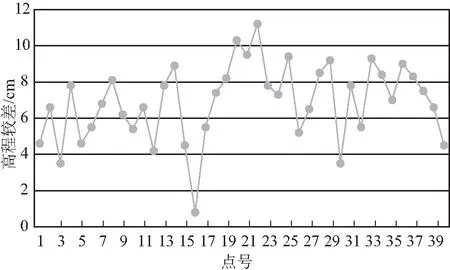
图4 高程较差分布
选取30条边进行边长精度分析,经计算最小较差为1.3 cm,最大较差为8.6 cm,边长中误差为5.5 cm,高程较差分布如图5所示。
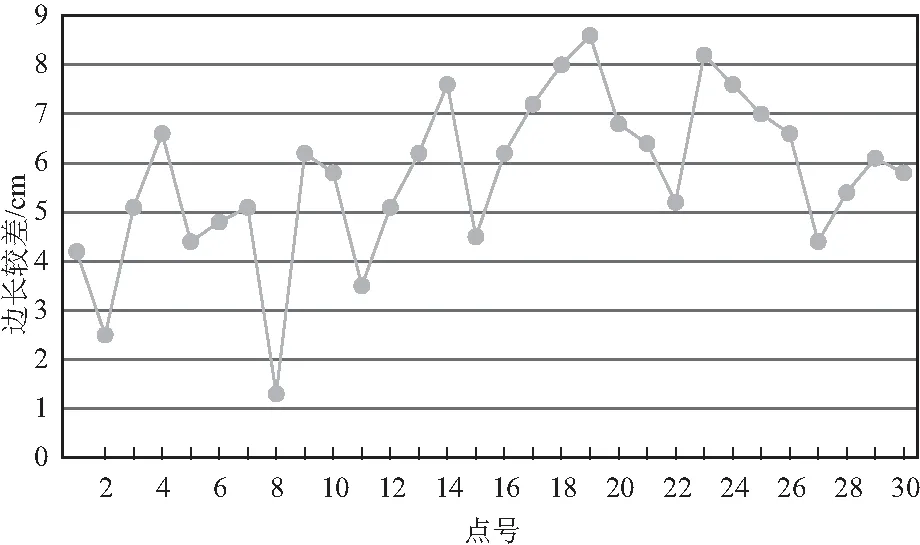
图5 边长较差分布
4 结束语
本文通过NavVis VLX可穿戴式三维激光扫描系统进行1∶500比例尺测图,并对其测量精度进行了验证,由上述分析可以看出,平面点位精度、高程精度、边长精度均符合城市测量规范要求,完全可以运用到大比例尺测图项目中。目前内业成图自动化程度较低,对于地物的自动特征识别、提高内业成图自动化程度的算法有待进一步研究。
猜你喜欢
工程与建设(2019年3期)2019-10-10
北京航空航天大学学报(2017年9期)2017-12-18
北京航空航天大学学报(2017年4期)2017-11-23
中国工程咨询(2017年12期)2017-01-31
光学精密工程(2016年3期)2016-11-07
测绘科学与工程(2016年6期)2016-04-17
电测与仪表(2016年9期)2016-04-12
安徽地质(2016年4期)2016-02-27
山东冶金(2015年5期)2015-12-10
全球定位系统(2015年4期)2015-02-28
