
基于车载激光扫描的城市典型道路面点云提取
2023-04-06 10:10杜珍珍赵海洋
北京测绘 2023年2期
杜珍珍 赵海洋
(浙江省国土勘测规划有限公司, 浙江 杭州 310030)
0 引言
对于城市交通管理、道路维护等工作,高精度的道路三维信息具有重要的作用。近年来,随着测绘软硬件设备的发展,越来越多的空间数据获取手段也在不断出现。作为一种能够在短时间内快速、高效采集空间三维数据的测绘手段[1],车载激光扫描系统的出现为解决城市街道几何数据与纹理数据的获取提供了重要的技术支撑,自从其问世以来,便在各行业,尤其是测绘行业发挥着积极的作用。
目前,基于车载激光扫描点云数据的道路信息提取主要分为两类,一种是从点云投影得到的特征图中间接提取道路信息,该类方法首先根据路面点云信息与邻域其他点云信息在密度或高程上的差异进行图像转换,再将图像处理领域中的方法引入进行道路信息提取[2-3]。由于该类方法首先需要进行图像转换,造成了部分精度损失,因此限制了该类方法的使用。道路信息提取另一种方法是从道路点云场景中直接提取道路信息,该类方法根据的是道路点云场景中不同地理实体在空间中的局部特征差异进行点云聚类分析,从而实现道路信息的提取。诸多学者针对点云分布特征进行了相关研究。张达[4]根据点云的法向量残差、离散度等特征,综合使用支持向量机进行树木、斜坡、地面点的分类;陈健华[5]根据扫描线特征将近似水平线的长直线点云作为道路面点云进行提取,道路受到遮挡时该方法的使用受限;方莉娜等[6]根据城市道路典型特征提出了一种适用于路边缘点较为突出的道路点云提取方法,并取得了良好的效果;李波[7]使用模糊聚类算法结合道路点云分布特征实现道路面点云提取;Smadja等[8]基于随机抽样一致性算法提取路面点云。
本文根据城市道路车载激光点云数据的分布特征,针对非地面点云滤波中存在过分割的问题,提出引入Otsu算法进行高程阈值自适应获取,同时将道路点云法向量夹角与曲率值阈值作为约束条件,使用区域生长算法进行道路面点云的准确提取。
1 城市道路面点云提取算法
本文针对城市结构化道路点云场景分布特征,提出了道路面点云提取的算法流程,主要包括两个步骤:
(1)地面点云提取。首先使用体素滤波对原始点云数据进行下采样处理,再使用基于高程阈值的滤波算法获取地面点。
(2)道路面点云提取。针对地面点云特征,根据欧氏聚类进行最大连通区域点云的选取并分段,采用区域生长算法并且以法向量夹角、曲率值阈值作为约束条件进行道路面点云获取。
1.1 地面点提取
由于车载激光扫描系统在进行道路点云采集时扫描路线较长,在采集道路面点云的同时能够扫描得到道路两侧行道树、杆状物、建筑物等非地面点。因此在进行道路面点云提取时首先需要将非地面地滤除。根据不同地物在点云场景中的高程信息,本文选择通过设置高程阈值的方法进行非地面点滤除。由于城市道路具有一定的坡度,不同路段路面的高程具有一定差异,不同路段需设置不同的高程阈值,因此研究如何根据不同路段自适应地设置高程阈值尤为关键。
作为一种主要用于二值图像的自适应阈值分割算法,Otsu算法能够根据不同阈值实现二值图像的自适应分割[9]。通过计算二值图像前景与背景部分的类间方差,取方差最大值所得的阈值为最佳分割阈值。
考虑Otsu算法在二值图像阈值分割中的应用效果,本文引入该算法至点云滤波高程阈值选取中,针对不同路段,使用Otsu算法自适应地计算得到高程分割阈值,将高于阈值的点删除,保留低于阈值的点,从而实现非地面点滤除[10-11]。Otsu算法进行非地面点自适应滤除的具体步骤为:
1)记录输入点云数据为N,将点云高程最大值记为Hmax,点云高程最小值记为Hmin。对输入点云进行高程分层,每层中点云是数量记为ni,每层点云的概率记为
(1)
2)假设将高程值k设置为阈值对原始点云进行划分,一部分点云为C0,另一部分点云为C1,这两部分点云出现概率为
(2)
高程平均值为
(3)
式中,μT表示点云平均高程。
3)点云分割后,计算地面点与非地面点间的高程类间方差
g=ω0ω1(μ0-μ1)2
(4)
4)不断通过新的高程阈值重复上述步骤,将最佳分割阈值确定为地面点、非地面点高程类间方差最大时的阈值,此时保留小于该阈值的点,剔除高于该阈值的点。
1.2 路面点云提取
Otsu算法进行地面点提取时,获取的不仅是道路面点云,还有道路面以外的平面区域点云。所有地面点云数据区域构成了最大连通区域,包括道路低矮植被、路缘石、道路面等,如图1所示。根据图1可知,在道路面区域,点云法向量的分布较其他区域更为集中并且法向量垂直地面向上。因此,可将道路面点云法向量夹角作为约束条件,利用区域生长算法进行道路面点云提取。
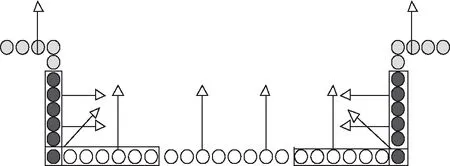
图1 道路横截面法向量示意
1.2.1点云法向量计算
作为地理实体的重要属性之一,法向量可以表征实体在几何空间的分布状态。然而点云作为众多离散点组成的点集合,无法通过法向量表征点云的几何特征,因此对于某个点的法向量,只能通过该点所在邻域范围内拟合平面的法向量表征[12-13]。
对于点云场景中的激光点pi(xi,yi,zi),首先确定该点k个邻域点,通过邻域点使用最小二乘法得到局部拟合平面P,P可表示为
(4)
式中,k表示邻域点个数;n表示法向量;d表示拟合平面与原点间距。
求导运算式(4),得到矩阵C最小特征值以及特征值对应特征向量,该点法向量就是计算得到的特征向量
(5)
C·vj=λj·vj,j∈{0,1,2}
(6)
式中,p表示邻域内三维质心的坐标向量;λj、vj分别表示特征值以及其对应的特征向量。
1.2.2区域生长算法
作为一种常用的分割算法,区域生长算法实现分割的两个主要步骤分别为种子点选取与设置生长规则[14]。以往区域生长算法中对于种子点选取较为随意,造成点云分割效率低下、过分割等问题,本文通过将曲率值最小点作为初始种子点进行区域生长获取道路面点云。因此,本文基于区域生长算法的道路面点云具体步骤为:
使用高程阈值滤波算法提取得到地面点云为P。
1)对地面点云中所有点的法向量N与曲率值c进行计算。
2)设置初始种子点集Sc,将地面点集P中曲率值最小的点Pmin加入初始种子点集Sc中。
3)在初始种子点集Sc中任意选择一点Pc,使用KD树得到该点Pc邻域点集R。
4)计算种子点Pc与邻域点集R中点的法向量夹角θ,将夹角小于夹角阈值θth的点加入点集Rc中。
5)将Rc中曲率值ci小于曲率值阈值cth的点加入点集Sc中。
6)将种子点从点集中剔除,重复步骤3)至步骤6),直至Sc为空点集。
7)合并Rc中的点为点集Pr。
将Pr作为道路面点云输出。
2 实验与结果分析
2.1 实验数据
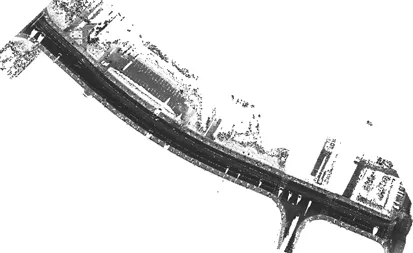
为了对本文提出的道路面点云数据提取算法的有效性进行检验,选择两段城市典型道路进行实验。该两段城市典型道路点云数据是通过华测导航AS-900HL高精度移动车载激光扫描系统采集得到,该车载激光扫描系统的组成部分主要包括全景相机、激光扫描仪、惯性导航装置、卫星定位模块以及里程计等。道路点云数据采集过程中,为了尽可能将道路特征采集完整,车辆行驶速度保持在30 km/h左右,并且避免与大型车辆并行。图2(a)为路段1点云数据,该段道路较为弯曲且坡度较大,总长度约为150 m;图2(b)为路段2点云数据,该段道路较为平直且坡度较小,总长度约为200 m。两段道路均包含行道树、杆状物等城市典型地物。

(a)路段1
2.2 精度评价指标
为了定量分析与评价本文提出道路面点云提取算法的性能,使用检测质量q、完整性r以及准确性p表征道路面点云提取精度,评价指标表达式为[15-16]
(7)
(8)
(9)
式中,TP表示正确提取道路面点个数;FP表示误检为路面点的非路面点个数;FN表示未正确检测出的路面点个数。
2.3 非地面点滤波结果
对两段城市典型道路使用Otsu算法自适应获取滤波阈值,其中路段1计算得到的阈值为3.796 5,路段2计算得到的阈值为3.824 7,根据高程阈值对路段1、路段2进行非地面点滤波,结果如图3所示。通过图3可以看到,点云场景中杆状物、行道树等高程较高的地物基本被滤除,实现地面点云的初步提取。但是对于一些贴地的地物如车辆、低矮植被等无法完全滤除,需要使用区域生长算法进行道路面点云的精确提取。
(a)路段1
2.4 道路面点云精确提取与分析
将经非地面点滤波后的点云数据作为区域生长算法的输入数据进行道路面点云提取,区域生长算法包含主要参数为邻域搜索点数量k、曲率值阈值CT以及法向量夹角阈值ST[17]。本实验中通过不断设置阈值并进行结果对得知,路段1邻域搜索点数量k取30、曲率阈值CT取0.07、法向量夹角阈值ST取9°;路段1邻域搜索点数量k取30、曲率阈值CT取0.05、法向量夹角阈值ST取5°。通过设置阈值并进行路面点云生长,得到路段1、路段2的道路面点云提取结果如图4所示。

(a)路段1
通过图3可知,本文方法可以有效提取道路面点云,无论是弯曲道路还是平直道路,本文方法的提取效果均良好。使用检测质量q、完整性r以及准确性p对道路面点云提取结果进行定量评价,结果如表1所示。

表1 道路面点云提取结果精度统计 单位:%
通过表1可知,本文方法提取两路段道路面点云结果的检测质量q、完整性r以及准确性p平均值分别为94.85%、96.12%、97.02%,均在93%以上,表明本文方法可以对道路面点云进行准确提取,受道路形状、宽度影响较小。
3 结束语
针对城市典型道路点云的分布特征,本文提出了一整套道路面点云提取方法。首先使用高程阈值滤波算法滤除非地面点,其中引入Otsu算法自适应获取点云滤波高程阈值,保证了地面点获取的精度与完整度;其次引入区域生长算法进行道路面点云提取,将曲率值阈值以及法向量夹角作为区域生长算法的约束条件。通过某两段实测道路点云数据实验结果表明本文提出道路面点云提取算法提取道路检测质量q、完整性r以及准确性p均在93%以上,表现出了较高的性能,下一步将重点针对非典型道路面点云的提取算法进行研究。
猜你喜欢
工会博览(2022年5期)2022-06-30
中国交通信息化(2021年2期)2021-07-22
颂雅风·艺术月刊(2020年10期)2020-12-07
吉林大学学报(理学版)(2020年3期)2020-05-29
建材发展导向(2019年11期)2019-08-24
海峡姐妹(2019年5期)2019-06-18
自动化学报(2018年7期)2018-08-20
学生天地(2017年33期)2018-01-31
周口师范学院学报(2016年5期)2016-10-17
