
基于中值对消ACSI算法的机载雷达杂波抑制研究
2023-04-07 10:01党腾飞卢珊珊
火控雷达技术 2023年1期
李 哲 王 伟 赵 娟 党腾飞 卢珊珊
(1.西安电子工程研究所 西安 710100;2.西安现代控制技术研究所 西安 710065)
0 引言
合成孔径雷达(SAR)是一种空间分辨率极佳的微波成像雷达,可全天时全天候工作,通常应用于对地或对海的静止场景成像,在民用观测和军事领域都有着举足轻重的作用。然而在工程实际中雷达往往工作在较为复杂的环境下,因此接收回波中会存在大量的杂波和噪声分量,直接影响了雷达的信杂噪比,从而影响到雷达的动目标分辨性能[1]。因此,为了得到更高精度的动目标检测结果,地杂波抑制的重要性便不言而喻。
常见的杂波抑制技术有时间平均相干机载雷达(TACCR)技术以及偏置相位中心天线(DPCA)技术等[2]。然而,由于杂波抑制算法要实时进行大量滤波权系数的计算,因此其较难应用在实际雷达工程信号处理中[3]。故本文着重选择了CSI、ACSI、中值对消ACSI三种算法加以研究,首先对机载雷达地杂波进行了建模,然后分析了上述三种算法的原理和理论性能,最后通过DSP将其应用在实际工程中,以工程实际数据来验证并比较几种算法的优越性。以此为思路,首先,我们需要对机载雷达地杂波的特征加以研究。
1 机载雷达地杂波模型
如图1所示,为机载雷达回波数据采集几何关系。接收中心设置在由均线阵(ULA)接收回波信息的最大速率Va、平台高度h的水平面上进行匀速直线运动的载机上,它的阵元数为N,阵元间隔为d,并设雷达波长为λ,脉冲重复周期(PRT)为Tγ,在单个CPI内以M个脉冲发送和接收。

图1 机载雷达回波数据几何关系
如果把全部杂波按方位角等分成Nc个杂波源,并认为每个杂波源都彼此独立同分布,在时域中是彼此相关的。则对于没有距离模糊的系统来说,其第i个杂波源的MN×1维空间时间导引向量,可以描述为
Vt-s(∂i,ϖi)⊗Vs(∂i)
(1)
其中,Vt(ϖi)=[1,e2πjϖi,…,e2πj(M-1)ϖi]T,Vs(∂i)=[1,e2πj∂i,…,e2πj(N-1)∂i]T为杂波的时域和空域导引向量;⊗表示向量的Kronecker积;上标T为矩阵求转置,ϖi、∂i则是对第i个杂波源的归一化多普勒、空间频率,由其俯仰角θi,方位角φi和偏航角度φa确定,即
(2)
经过距离脉压后,此距离内杂波的回波信号可用所有杂波源的线性组合来表示为
(3)
其中
Vt-s=[Vt-s(∂1,ϖ1),
Vt-s(∂2,ϖ2),…,Vt-s(∂Nc,ϖNc)],

(4)

2 杂波抑制干涉(CSI)
2.1 双通道CSI-SAR信号模型
图2所示为机载双通道CSI-SAR数据采集的几何和空间模型。确定载机沿X轴航行,雷达天线在正侧视方向上运行,波长为λ,相位中心为O,再由子口径A、B按航迹位置依次排列接收信息,从子口径相位中央到O的距离都是d/2。假定某一发散点在场地上为P,则其方位角和俯仰角在发射孔相位中央所对应的位置,依次为φ、θ。从图2中可以发现,由于接收位置在航迹上并不相同,导致当P点回波达到孔径A、B处时,就会形成一条路径差Δr=OB-OA,而因为双极化天线孔径间距d远低于成像间距,图中OA和OB两线也近乎平行,因此Δr也可表达为
Δr=dsinφcosθ
(5)
这样,P点的回波信号传输到A、B点时将会有不同的相位差为
(6)
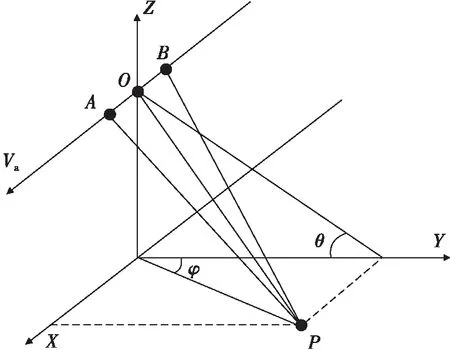
图2 双通道 SAR/GMTI 回波信息接收空间关系图
假定P是杂波,其由于载机运行引起的相对运动形成的普勒频率就可以描述为
(7)
即当P点为具有一定径向速度的运动目标时,其多普勒频率由目标本身和载机运动联合确定,可以描述为式(8)所示。
(8)
由此可见,同一个位置的杂波与不同运动时刻的目标之间存在着截然不同的多普勒频率,这样在经过SAR成像后,会处在同一图像中不同的多普勒方位单元内。同理,实际位置处于不同方位的运动目标和杂波,虽然其可能均处于图像中同一像素单元上,但二者由于不同通道接收造成的相位差也不同。多通道的SAR系统正是由于这一点,才可进行空、时二域的协同处理,这样一来,便可使临近杂波空间的慢动目标的检测更好地进行。
在进行双通道CSI处理时,对天线A、B点回波的成像中心点分别进行成像运动补偿处理。因此,A、B接收孔径得到的SAR图象中,与相应像素单元中静止目标之间具有公式(6)中的相位差,所以空域的消权系数可以通过一个一个的图像单位来计算,这样就完成了杂波控制的工作。图3中提供了双通道CSI的信号处理示意图。
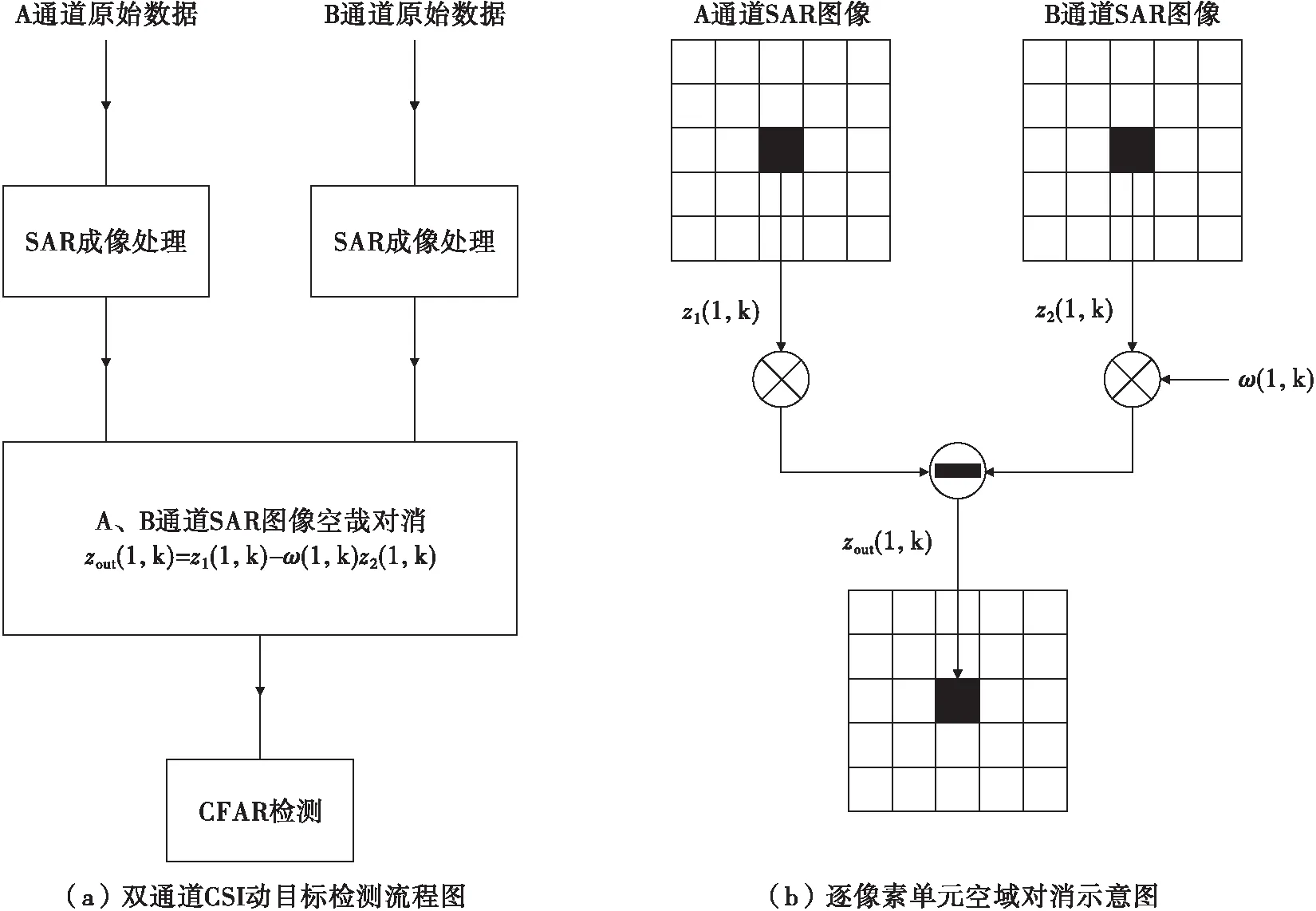
图3 双通道CSI-SAR信号处理示意图
A、B接收孔径得到的SAR图像中相应像素单元的复信号分别用z1(l,k),z2(l,k)来表示,其中l为距离单元序号,k为方位单元序号,该像素单元对应的空域对消权系数用w(l,k)来表示为
(9)
即每个像素点单元对消权系数可根据系统参数和成像几何关系来计算,并借此逐像素对B通道图像进行补偿,然后对补偿后两通道图像进行相减计算:
zout(l,k)=z1(l,k)-w(l,k)z2(l,k)
(10)
A通道SAR中,设某独立像素单元的杂波及动目标信号分别为C1、S1,所处实际方位位置对应的干涉相位分别为φc、φs。那么B通道对应像素单元中杂波信号为c2=c1ejφc,目标信号为s2=s1ejφs,则两种分量的输出在经过上述处理后可分别表示为
(11)
也就是说杂波矢量可以全部消除,所以在对消过程中由于动目标的径向速率引入附加的多普勒频率,故能量得以保留。
2.2 自适应CSI技术
由公式(9)提供了理想情形下空域内对消权系数的准确测算,即利用系统参量和成像空间几何关系对其加以推算,这也是CSI-SAR有效检测的必要前提[4]。而在实际数据处理中,由于信道幅相误差、惯导系统误差等误差的出现,简单按照公式方法(9)测算所得到的对消权系数往往并不准确[5]。此时,我们就可以利用接收数据对空域对消权系数来进行自适应的方式作出估算,我们可把在这个方式下的CSI算法称作ACSI算法[6]。
2.2.1ACSI算法权系数的计算
在ACSI处理中,由邻近的像素单元信号自适应估算可得出任一像素单元空域对消权系数。在无目标出现的情况下,相邻信道中与SAR图像对应的像素单元的复信号可由xn(l,k)=cn(l,k)+nn(l,k)(n=1,2)来表示,其中cn(l,k)、nn(l,k)分别是杂波和噪声分量,且彼此独立。而为了将噪杂的输出功率最小化,可按照最小均方误差原则(MMSE),选取的待测量单元的空域对消权系数符合如下要求
(12)
求解可得
(13)
(14)
2.2.2 中值对消ACSI算法

由此,可将中值估计法带入ACSI数据处理中,用式(14)的最小均方法对空域相对消权关系作出了估算。但在双信道SAR数据处理时,由于像素单元个数大大地超过了其计算自由度,因而可以把该办法带入空域的对消处理过程中,以大大降低在扰动任务中对杂波控制的效果。根据这一点,还给出了一个大值对消ACSI杂波的方法,在该方法中,权系数的运算可以由式(15)实现。
(15)
其中,MED[·]为取中值。可以说明,当样本数量趋于无穷时,wMED就可以收敛为式(13)中的最优权系数w。为便于表达,以下过程中同样省略了式(15)中像素单元序号。令:
zopt=x1-wx2
(16)
表达最高权系数所相应的输出信息时,其zopt与x2不关联,又因x1,x2是零平均数复高斯变数,故线性形式zopt也是零平均数复高斯变数,所以,zopt与x2互相独立性。对x1进行求解即可得到
x1=zopt+wx2
(17)
定义变量ω=x1/x2,则
(18)
对式(18)中ω的实部分和虚部分别取统计的数值,可得式(19)。
(19)
其中medr,j{·}表示对实部与虚部分别统计中值,再有
(20)
其中,复高斯变量x2,zopt的标准差分别为σx2和σzopt。这样一来,β的分数线上下均为方差为1的相互独立的零均值复高斯变量。因此,均可这样表示β实虚部的概率密度函数为

(21)
可以看出,式(21)中的函数fβr,i为βr,i的偶函数,所以可知β的均值为零,则有
medr,j{β}=E{β}=0
(22)
故wmed=w,即当样本数量趋于无穷时,wMED收敛于最优权矢量。
3 杂波抑制算法的工程实现
3.1 信号处理系统设计
由于雷达在进行回波数据处理时要接收大量的数据,故工程上雷达的信号处理机多采用FPGA+DSP的双芯片模式,以保证数据处理的速度以及可嵌入式的程序改动[7]。为满足算法需求,本系统选用一片Kintex7系列的FPGA,和两片飞腾公司的C66XX内核的DSP处理器C6678。图4为雷达信号处理机的工程实现方案,其特点是:采用了FPGA+DSP的信号处理架构;芯片间的通信互联采用了SRIO总线;外接了DDR3存储器扩展数据存储;网口通信、系统控制和数据传输采用了UDP协议。本系统利用了FPGA的流水性能和多核DSP的数据并行处理能力,将算法合理分配到不同的处理器中。总体来说,雷达收到回波信号时,信处系统接收从前端传来的数据,通道AD对原始数据进行采样和模数转换,之后传至FPGA进行数字下变频和距离向脉冲压缩处理。脉压后的基带信号以脉冲重复频率通过SRIO接口实时将每个脉冲的回波数据发送至DSP进行其他数据处理。图5和图6分别为雷达工程实现所用DSP板卡和DSP程序的调试界面。
3.2 实测数据处理结果
为了经由雷达SAR成像和动目标显示功能验证上一章节中三种算法的性能,试验选取陕西省某地进行SAR成像,所用雷达系统参数如表1所示,另有三辆车辆作为配合动目标在成像区域省道上以30km左右的时速匀速行驶。

图4 雷达信号处理机实现方案
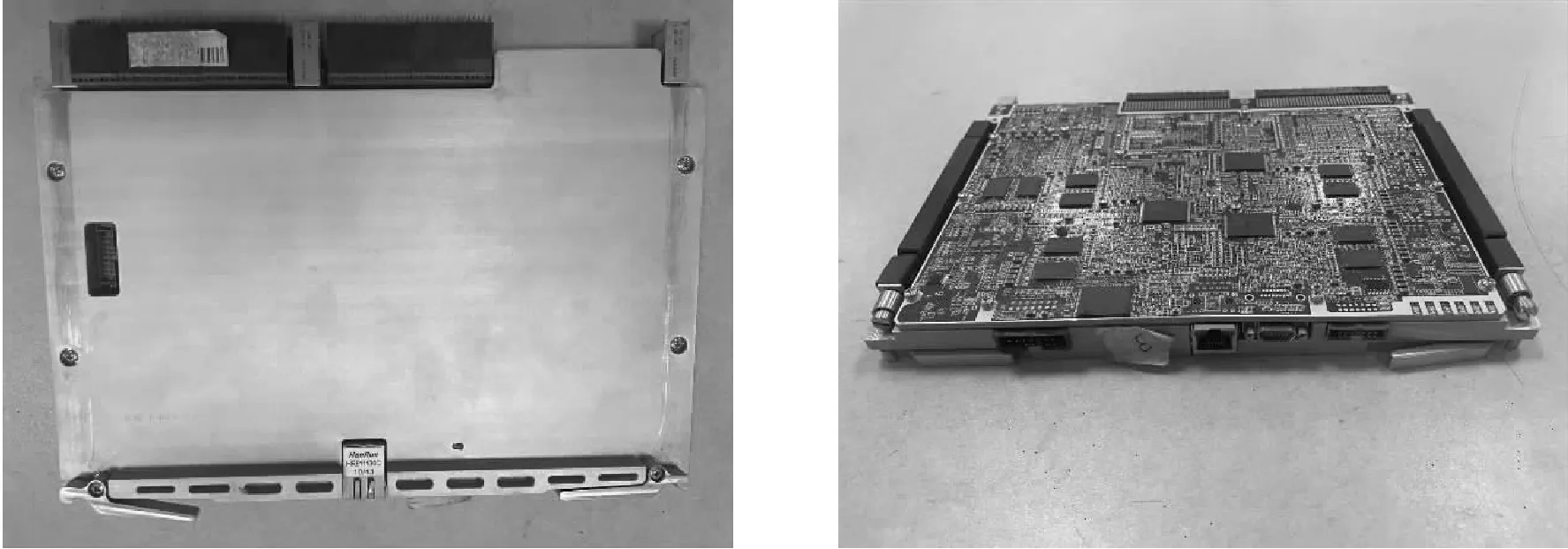
图5 工程实现所用的DSP板卡
图6 DSP调试界面

表1 试验所用系统参数列表
图7为三种算法对同一目标场景SAR成像图中的数据处理结果。其中,图7(a)为原始SAR图像,三个配合目标车辆已在图中标注出;图7(b)为CSI算法下的处理结果,如图7(b)所示,三个配合目标只识别出了两个,虽然识别到了一个地面非配合目标车辆,但是有高达7个虚警目标;图7(c)为ACSI算法下的处理结果,如图7(c)所示,三个配合目标都识别了出来,且还有一个非配合目标车辆,但仍有两个虚警目标;图7(d)为中值对消ACSI算法下的处理结果,如图7(d)所示,三个配合目标均有识别,虚警目标也只有一个,而且识别到多达三个地面非配合目标车辆,由试验现场确认,三个非配合目标均为实际行驶在道路上的民用车辆。由试验结果可得:中值对消ACSI算法比起另两种算法,其动目标信杂噪比提高更大;动目标输出功率提高也更大;表现在SAR图像上可清晰观测并识别到动目标强点的反射信号,且虚警率大幅降低,系统更易通过CFAR检测。因此可得,在非均匀复杂环境中,中值对消ACSI算法比起另外两种算法,其杂波抑制效果明显更好,动目标显示的性能也更强。

图7 三种算法在同一目标场景中的数据处理结果
4 结束语
本文主要对CSI、ACSI和中值对消ACSI三种算法在机载SAR-GMTI系统中的应用进行了研究,首先分析了算法的原理,然后通过DSP进行了工程实现。由试验结果可知,中值对消ACSI算法比起另两种算法,其动目标信杂噪比和动目标输出功率均有提高,且虚警率大幅降低,使得杂波抑制在非均匀复杂环境中具有更好的适应性,可以认为是一种更符合工程实际的多通道SAR-GMTI杂波抑制方法。
猜你喜欢
科学与信息化(2021年30期)2021-12-24
军民两用技术与产品(2021年10期)2021-03-16
数学学习与研究(2018年5期)2018-03-28
数学学习与研究(2016年21期)2017-05-08
广东技术师范大学学报(2016年5期)2016-08-22
西南交通大学学报(2016年4期)2016-06-15
海峡科技与产业(2016年3期)2016-05-17
中国农业文摘-农业工程(2016年5期)2016-04-12
西北工业大学学报(2015年3期)2015-12-14
遥测遥控(2015年2期)2015-04-23
