基于空间分块的CGF注意力感知方法
2023-04-24 11:26俞棋睿欧阳伟俊矫媛媛
指挥与控制学报 2023年1期
俞棋睿 欧阳伟俊 秦 龙 矫媛媛 胡 越
1.国防科技大学系统工程学院 湖南 长沙 410073
陆军分队战术级作战仿真系统中CGF 的战场行为与地理环境和实体活动紧密相关. 实现高效且精确的态势感知和实例价值排序[1],在增强CGF 行为拟人性、提高仿真系统运行效率等维度上都有重要意义. 空间认知技术在环境知识的获取、表示、管理等任务中应用愈发广泛[2],而实现对虚拟战场环境感知过程的建模,能够有效实现针对战场态势中目标对象的感知、管理与查询功能. 这对于提高CGF 模型空间感知行为的可信度和感知行为模型计算效率,具有现实意义.
在对军事人员态势感知过程方面,本文采用了价值排序的思想,价值排序指在虚拟环境中,感知主体结合多感官感知注意力机制和感知主体实例偏好等,对感知对象进行价值评价及排序的过程. 考虑到CGF 动作行为的可编程性,重点考虑视觉和听觉两种感知方式,并充分研究各实例类感知习惯、能力等现有资料,提出各影响因子线性加权后的价值评价算法,从而生成CGF 态势感知下感知目标的有序输出. 感知对象价值排序结果的准确与否,对CGF 后续分析决策的合理性、虚拟战场仿真推演的逼真性都存在一定影响. 如何合理量化影响因子的作用权重,是衡量注意力感知方法可信度的关键所在[3].
本文对如何提升感知模型计算效率进行了研究.目前,制约感知效率提升的一大性能瓶颈是感知主体查询及动态管理感知对象的时间复杂度. 其中,传统的简单遍历法准确率高但查询效率较为低下;KD树管理CGF 实体的方法,虽大大提高了查询效率,但KD 树的频繁重构同样造成大量的时间浪费.
针对上述问题,本文基于空间分块的实践实现了对战场空间的高效感知及动态管理. 结合多感官感知注意力机制(视、听)及感知主体实例偏好,应用价值排序建立了基于感知注意力机制的价值模型,并与传统感知方法横向对比. 结合空间分块和价值模型搭建了分队战术级态势感知仿真平台. 基于空间分块的CGF 注意力感知方法,在不损失感知精度的前提下能够有效提高感知效率,具有其可行性和有效性,可为战场态势感知实践提供参考.
1 多感官感知注意力机制
1.1 视觉感知作用机理
视觉模型使用锥形感知模型[4],以视点为圆锥顶点,视线所在直线为圆锥中线. 感知夹角构建视锥,如图1 所示,视锥尽头最外围为视圈,中心处为心点.若CGF 实体落在锥体内,则认为其处于可感知范围之中,纳入感知对象行列[5].
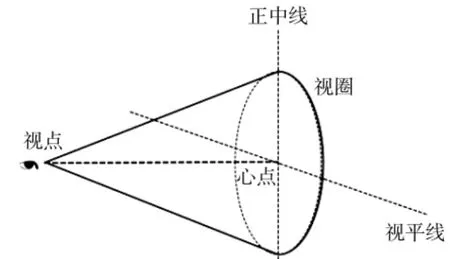
图1 视觉模型锥形感知示意图Fig.1 Schematic diagram of cone perception of visual model
在二维平面上,如图2 所示,采用视觉模型扇面感知. 以观察点为圆心,最大观察距离为半径,视野跨度为扇形的角弧度,从而确定视觉观察范围[6].
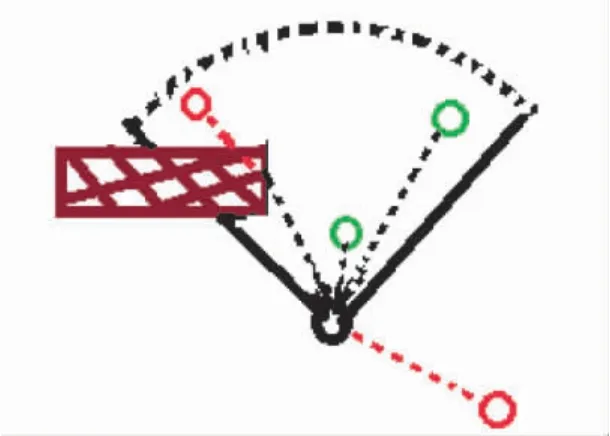
图2 视觉模型扇面感知示意图Fig.2 Schematic diagram of sector perception of visual model
1.2 听觉感知作用机理
听觉模型[7]使用球形感知模型,如图3 所示,以听觉中心为球心,设定听觉半径及听觉阈值,根据各声源分贝数与听觉阈值的比对,声源地理坐标与感知球形区域的匹配确定CGF 实体的可感知性.
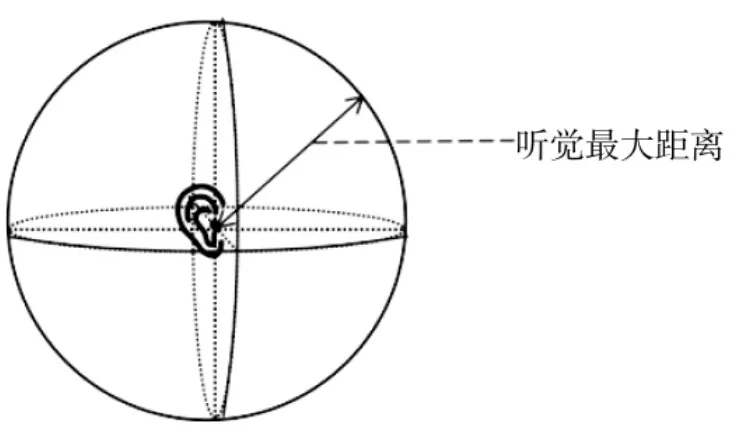
图3 听觉模型球形感知示意图Fig.3 Schematic diagram of spherical perception of auditory model
在二维平面上,如图4 所示,采用听觉模型圆形感知. 以观察点为圆心,最大听觉距离为半径,绘制听觉感知圆,从而确定听觉感知范围.

图4 听觉模型圆形感知示意图Fig.4 Schematic diagram of circular perception of auditory model
2 空间分块的对象感知方法
2.1 空间分块的实施
空间分块,即按照固定长宽分割特定地理空间为若干等大地块,如图5 所示,sTile 即为地图sMap中的等大地块.
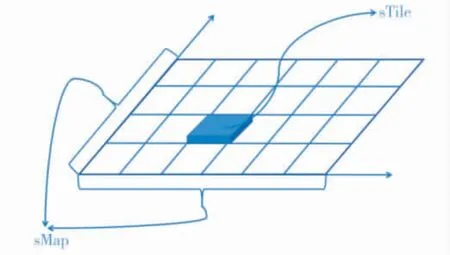
图5 作战区域空间分块思想可视化呈现Fig.5 Visualization presentation of spatial block concept in combat geographical area
此外,于各地块内部维护一系列存储某一特定类型及阵营实体的链表,即以vector 容器存储某一地块内各类型-阵营对包含的全部CGF 实体集合;同时构建CGF 实体与所属地块间的二维映射哈希表,以STL 的关联容器map 建立CGF 实体ID 与所属地块间的键值对应关系. 其中,链表实现了对单个地块内部感知对象的定位索引,为轴对齐包围盒(axisaligned bounding box,AABB)涉及地块的感知提供支撑;而哈希表则存储了整个仿真区域内所有感知对象的信息,以便根据感知对象ID 查找其相关信息. 链表和映射哈希表的引入,实现了地块与CGF 实体的双向链接,从不同层面满足了用户的快速查询需求.
映射哈希表建立了CGF 实体与所属地块的索引关系,有利于快速定位实例所属空间分块,大大降低了对象查询和管理的时间复杂度.
1)时间复杂度优化.链接CGF 实体与空间地块,在快速定位的同时实现了战场感知范围的块幅压缩,即克服了遍历较大地理空间范围造成的高时间复杂度.
在具体实施时,先根据观察者初始位置及其类型属性,绘制其视觉观察扇面和听觉感知圆,并拓展为各自的AABB. AABB 即为包含该对象,且各边平行于坐标轴的最小矩体,在二维平面上体现为最小矩形. 通过包围盒在地理空间所处位置和覆盖面积,确定各自观察范围的相关所属空间地块. 并通过CGF实体和空间地块的映射关系,遍历相关地块全部实体,分别与视觉观察扇面或听觉感知圆相匹配. 空间分块思想的应用,大大降低了战场空间遍历的时间复杂度,优化了全域遍历的低成效、高耗时等弊端.
如图6 所示,观察扇面的AABB 覆盖了从A-I的全部地块,需遍历9 个地块中全部对象;而听觉感知圆的AABB 仅覆盖了块A、块B、块D、块E、块G、块H,只需遍历上述6 个地块中的对象[5].
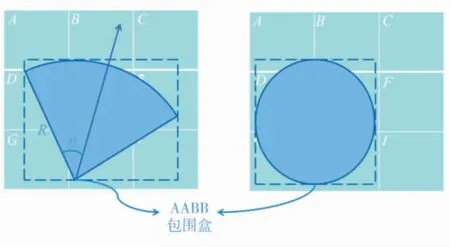
图6 观察扇面和听觉感知圆的AABBFig.6 AABB of the observing sector and auditory perception circle
2)对象感知方法. 确定感知主体Agent 的位置及观察方向,进一步确定其视觉感知扇面及听觉感知圆. 在此基础上分别绘制观察扇面及感知圆的AABB,依此确定完全或部分重叠的相关地块,即观察遍历的范围. 进而利用地块与CGF 实体间的链表实现对相关CGF 实体的快速定位及其与感知范围的匹配,以最终确定感知对象列表.
2.2 空间分块的比较优势
相较于传统链表的遍历查询和KD 树的高频重构,空间分块思想在对象管理和查询方面,有其显著的比较优势.
一方面,相比于传统链表的顺序遍历法,空间分块的对象感知方法实现了实体的定位初筛,将感知范围限制在与视觉扇面及听觉感知圆的AABB 完全重叠或部分重叠的空间分块内,大大压缩了遍历范围,避免了对不在感知范围内目标的比对检查.
另一方面,KD 树的对象管理方式包含KD 树的构建与查询. 感知对象在战场空间内频繁迁移的过程中,其相对位置不断变化,故KD 树的频繁重构无法避免. 相比于KD 树通过牺牲重构时间成本换取较高查询效率的弊端,空间分块的对象感知方法充分利用了一定时间跨度内CGF 实体基本停留于所属初始空间分块内的特点,大大降低了信息频繁存取造成的时间损耗,且极少数感知对象跨地块迁移对应于空间分块算法仅涉及相关链表及映射哈希表的删改,其时间成本同样远低于KD 树重构.
3 基于感知注意力机制的价值模型
计算机生成兵力综合了包括听觉、视觉在内的多种感官,从虚拟战场环境中进行态势感知. 感知注意力机制既包括由感知能力、习惯等要素导致的信息捕捉差异,又包含CGF 实体基于个体类型、属性的个性化偏好. 构建感知注意力机制的价值模型,即对以上两种注意力机制的作用机理实行量化建模.从选择与反馈两个角度入手,通过感知信息的初筛,并将信息传回智能体形成反馈,依据价值排序生成基于价值得分的感知对象优先度降序实例列表.
3.1 价值指标体系构成
真实战场环境中,感知主体感知战场态势会结合客观目标威胁度及主体实例偏好,对感知目标价值进行综合考量,通过建立价值指标体系,确定价值指标参数及影响权重,求出价值得分并进行降序排序.
模型建立层面,分别建立视觉注意力模型[8-9]和听觉注意力模型.
构建视觉注意力模型时,主要考虑指标为目标与感知主体间距离[10]、角度偏移量[11]及感知目标移动性[3]三要素为价值评价排序依据. 对听觉注意力模型[12],主要考虑指标为声音分贝数,如图7 所示. 鉴于Agent 主体根据其不同的属性特点对感知对象存在的特定实例偏好,本文进一步将主体实例偏好纳入价值指标体系.
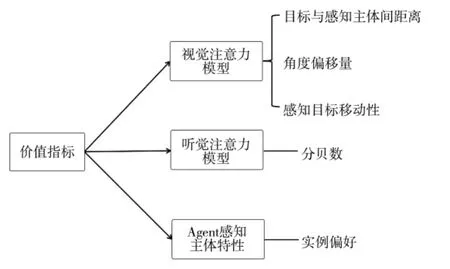
图7 注意力机制价值指标构成示意图Fig.7 Schematic diagram of composition of value indicators of attention mechanism
3.2 感知注意力的价值评价算法
感知注意力的价值评价算法: 输入: CGF 主体可感知目标对象全集R;输出: 价值优先度排序后的感知对象降序实例列表.
对于任意目标i∈R: 1)以目标与感知主体之间的距离从大到小进行排序,得到目标距离序号Rdis;2)以目标与视觉中轴线的角度偏移量从大到小进行排序,得到目标偏移量序号Rangle;3)以目标当前移动速度从小到大进行排序,得到目标移动性序号Rmobility;4)以目标分贝数从小到大进行排序,得到目标分贝数序号RDecibel;5)基于目标类型进行从低价值到高价值的偏好排序,得到偏好排名序号Rpref;6)将以上5 个参数分别赋权进行线性加合[13-14],并降序排序,得到根据价值得分降序排序后的有序目标集R′. 因各要素在价值评价体系中的重要度衡量存在实际偏好,故本实验平台暂采取直接相加并求取算术平均的方式定义价值得分.
4 实验验证
4.1 分队战术级态势感知仿真平台框架
分队战术级作战仿真系统旨在通过仿真推演还原真实战斗场景实况[15]. 考虑到多兵种一体化联合作战已然成为未来战争的基本作战形式,为充分还原虚拟战场环境,优化CGF态势感知,搭建仿真战场环境应设置不同阵营及多种类型的CGF 模型(含坦克、装甲车、单兵、集群等),并使之按照想定规则随机散落于地理空间各处. 鉴于CGF 实体生命周期的局限性和真实人类的注意力有偏性,在定义CGF 对象时也应引入注意力机制并定义生命周期属性,以初筛无效感知,凸显主要信息,实现多兵种及多阵营下的CGF 感知注意力控制,如图8 所示.
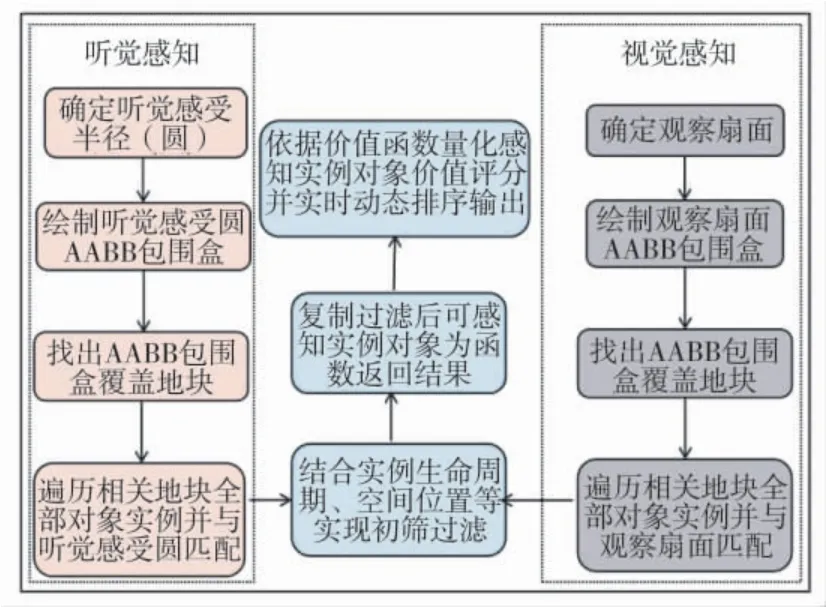
图8 分队战术级态势感知仿真平台框架Fig.8 Simulation platform framework of element tactical-leveled situational awareness
4.2 分队战术级态势感知仿真平台实现
本文聚焦于虚拟战场环境下感知主体对地图内各实例对象的感知效应. 在考虑到真实战场环境影响的基础上,综合视觉和听觉两个感知维度,和感知主体实例偏好的主观维度,提出了基于感知注意力机制的价值模型,依此对主体态势感知的注意力机制进行仿真模拟. 同时,结合实际军事分析需求,实现了二维空间下仿真推演的简单可视化并进一步将其封装为动态链接库,完成针对基于感知注意力机制的价值模型的验证. 同时,搭建的战场态势感知仿真实验平台,也能更加方便用户及时通过仿真结果进行分析,在短时间内迅速作出调整决策.
态势感知仿真平台实现的具体功能如下: 1)该平台使用户能够在地图场景内或随机或于指定位置放置感知对象[16];2)即时改变视觉观察扇面朝向,按用户需求调整感知方向(观察扇面中心线方向)[17];3)实现感知对象在地图范围内的随机游走;4)实现了Agent 主体对CGF 实体的实时探测、价值排序及可视化输出;5)即时按用户需求改变Agent 主体所处坐标位置;6)实现AABB 的可视化呈现.
如图9 所示,本文模拟的区域规格为100*100,单个地块规格为10*10,故将整个区域划分为了10*10 的方格区. 设地块数量为M,CGF 实体数量为N,故区域内总的变量个数为地块数量与CGF 实体数量的累加,即M+N. 在遍历查询、KD 树查询和分块查询3 种查询方式下,感知对象筛选过滤计算任务的时间复杂度分别如下:遍历查询因涉及模拟区域内全部CGF 实体,故算法时间复杂度为O(N);KD树查询算法在计算筛选过滤环节的时间复杂度时,并不考虑KD 树构建算法的时间耗费,因此,当CGF实体对象均匀分布于地图中时,KD 树的近邻搜索时间复杂度趋近于O(log2N),只有在CGF 实体呈现集中部署的情况下搜索时间复杂度才退化为O(N). 然而在本文研究所涵盖的应用场景中,由于CGF 实体位置的动态变化,将频繁引发KD 树的全局重构,这将带来额外的时间开销;而对于本文所给出的空间分块算法,考虑最坏情况为智能体的感知区域覆盖了全部地块,即感知区域的AABB 覆盖了所有的地块,此时算法时间复杂度为O(M)+O(N),但实际应用中,感知主体的感知区域面积远远小于整个地图的面积,且作为感知对象的CGF 实体一般呈均匀分布的态势,因此,其实际的搜索地块数量M′<<M,其时间复杂度将得到大幅压缩,且个别CGF 实体由于运动发生的位置改变只需要相邻地块之间的链表删除和插入操作,因此,更适合用于维护动态场景中的目标信息,故实际时间复杂度应远小于O(M)+O(N).

图9 战场态势感知仿真实验平台可视化Fig.9 Visualization of battlefield situation awareness simulation experiment platform
本仿真实验平台采用windows10 操作系统,CPU信息为Intel(R)Core(TM)i7-9750H CPU@2.60 GHz 2.59 GHz. 该仿真平台中,在战场空间内初始投入200 个CGF 实体,令其按照想定规则随机分布于地图各分块内. 青蓝色扇形和紫色圆形分别为视觉观察扇面和听觉感知圆的可视化呈现,玫红色矩形则为其AABB 标示.
地图内各CGF 实体依据其特定类型和阵营,由不同半径及颜色的空心圆标出,并被赋予特定行进速度. 地图右侧栏内由上至下分别显示当前时刻仿真时钟、仿真速度、探测距离、观测数量、查询方式及排序依据,CGF 实体列表内容则为感知对象的有序输出[18]. 随仿真时钟不断推进,地图内各实例对象以特定行进速度沿随机方向不断游走[3],随着感知对象不断变化,右侧栏输出也随时间推进实时更新.
图10 所示为3 种感知方式耗时对比(仿真平台运行100 次),横向比较空间分块的对象感知方法、简单遍历法以及基于KD 树的对象管理方法,可以发现,空间分块的对象感知方法在态势感知的时间效率上具有极大优势. 相比之下,简单遍历法因筛选范围存在较大冗余耗时更多,而KD 树因频繁重构造成大量时间损耗. 观察感知结果(如图11)可知,三者在感知对象的数量和内容上完全一致,仅仅只是价值排序的结果有所不同. 即空间分块法本身不会造成感知精度上的明显损失.
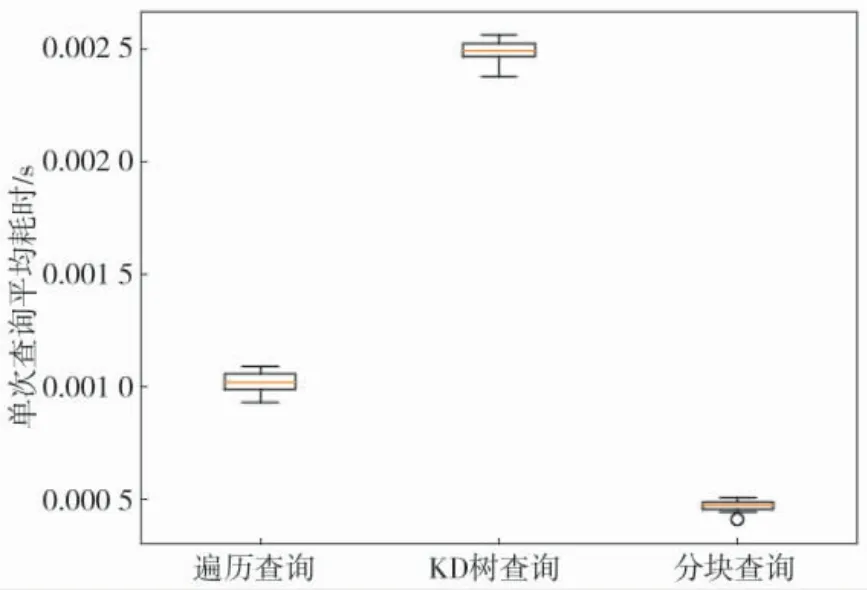
图10 3 种感知方式耗时对比Fig.10 Time consuming comparison of three kinds of perception modes
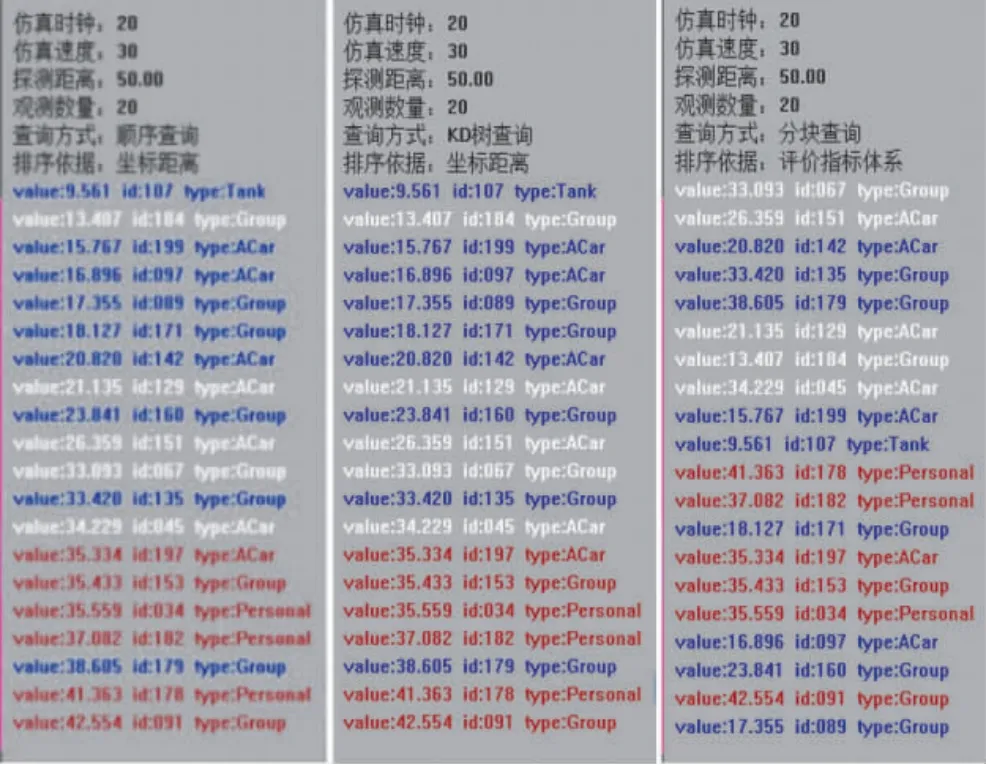
图11 3 种感知方式下结果的对比呈现Fig.11 Comparative presentation of results under three kinds of perception modes
在具体的仿真实验实施中,简单遍历法及基于KD 树的对象管理方法以感知主体与CGF 实体间的坐标距离为依据降序排序;而空间分块的对象感知方法则应用本文所提出的基于感知注意力机制的价值模型,依据价值得分降序排序. 观察排序结果可知,依据坐标距离的排序方法,存在较近单兵实体的价值优先度略高于稍远的装甲目标的情形,不符合主观认知. 而价值模型的构成则充分考虑感知习惯及主观认知,更符合战场实际.
综上所述,基于空间分块的CGF 注意力感知方法在不损失感知精度的前提下,能够有效提高感知效率,优化价值优先度排序[19-21],具有一定可行性,可为战场态势感知实践提供参考.
5 结论
本文实现了视听两种感官和感知主体实例偏好共同作用下的虚拟战场态势感知以及针对感知对象的价值排序,进一步基于离散事件调度框架,对虚拟战场态势感知仿真实验平台设计了完整的可视化动态链接库. 基于当下研究成果对下步工作作出如下展望: 1)拓宽感知维度;2)实现工程化;3)权重偏好训练;4)优化系统构建. 在后续工作中,需要进一步拓宽感知维度,以进一步贴近实战,提高仿真实验之于现代化战争的借鉴意义.
致谢
感谢本文的共同第一作者欧阳伟俊先生对态势感知仿真实验平台可视化实现、感知注意力价值评价算法设计等工作作出的重要贡献.
猜你喜欢
中学生数理化·七年级数学人教版(2022年11期)2022-02-14
科普童话·学霸日记(2020年1期)2020-05-08
山东农业工程学院学报(2020年12期)2020-03-19
中国惯性技术学报(2019年6期)2019-03-04
小天使·一年级语数英综合(2019年2期)2019-01-10
中央民族大学学报(自然科学版)(2017年2期)2017-06-11
湖州师范学院学报(2016年2期)2016-08-21
火控雷达技术(2016年3期)2016-02-06
山西大同大学学报(自然科学版)(2016年6期)2016-01-30
地理与地理信息科学(2015年4期)2015-10-13