脉冲雷达辐射源个体识别系统设计与实现
2023-04-25 08:12盛骥松郑俊兮
舰船电子对抗 2023年2期
丁 健,盛骥松,郑俊兮,柴 恒
(1.武警部队研究院,北京 100012;2.中国船舶集团有限公司第八研究院,江苏 扬州 225101)
0 引 言
雷达辐射源个体识别是战场电磁态势感知和电子侦察设备的主要功能之一。通过个体识别能够实现对雷达辐射源的个体区分及其平台的识别,因此能够准确详细地分析威胁目标的作战部署和作战能力[1-3]。雷达辐射源个体识别是电磁态势感知的子功能,它在电磁态势感知中的定位如图1所示。
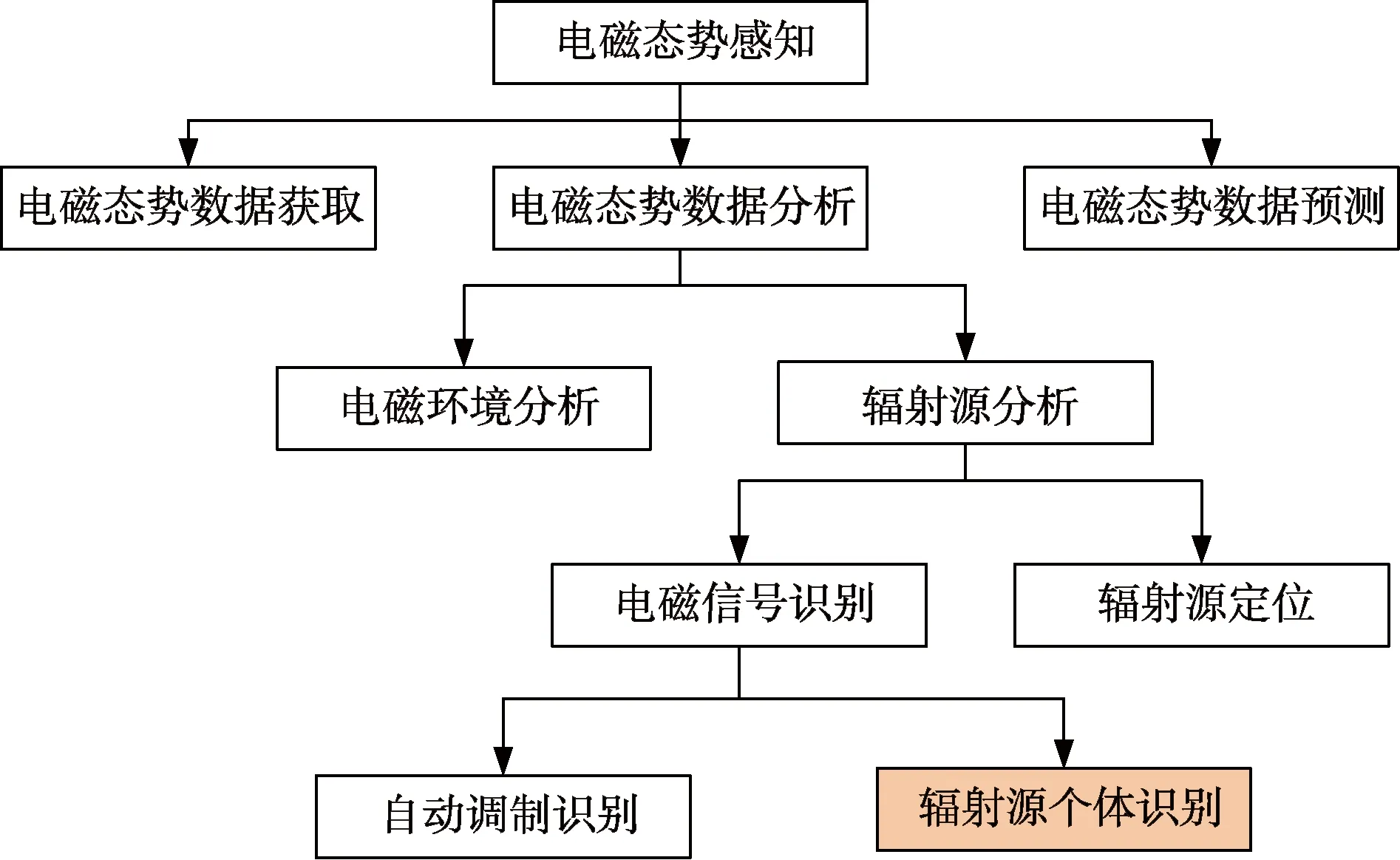
图1 辐射源个体识别的定位
随着雷达技术的不断发展,大量新型雷达辐射源得到了广泛应用,使得现代海战场电磁环境展现出载频/重频参数交叠、突发传输和脉冲密度更高的趋势,因此采用传统参数分析的态势感知技术已经难以适应现代密集复杂电磁环境下的辐射源分析和识别需求。
1 脉冲雷达辐射源各域特征范围
雷达辐射源个体识别通常采用特征参数提取、建立特征数据库和通过数据库对比的方式完成。根据经典的参数测量理论,参数的可信测量需要参数测量系统的精度要高于被测量系统一个量级以上。雷达辐射源个体识别的特征维度由脉冲包络特征、基准时钟频率、脉内频率调制曲线等组成。脉冲包络等特征参数典型值及基准时钟频率精度如表1所示。
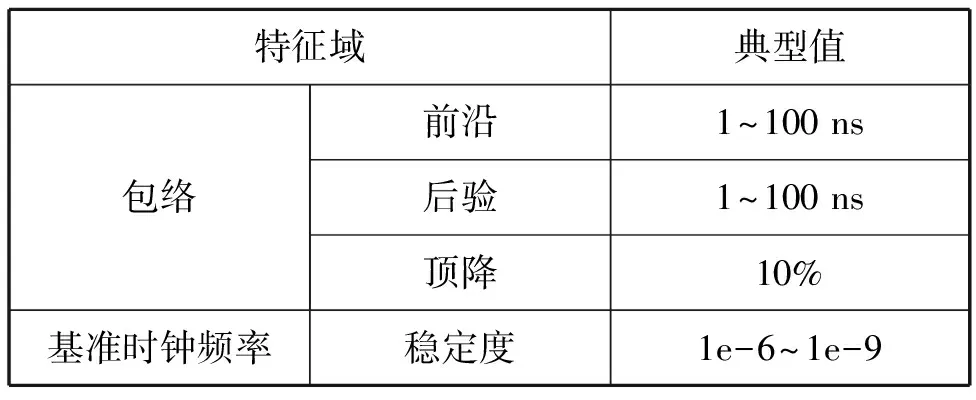
表1 个体特征典型值
为高保真接收和测量个体特征,个体识别接收系统的指标要达到上述相关指标的10倍以上,才能够准确接收和测量上述雷达辐射源个体特征。
2 个体识别接收与采样系统设计
根据上述分析和系统设计折中,个体识别微波系统需采用铷钟或更高精度的基准时钟系统,且保证采样系统的时钟来自于铷钟基准。
图2的接收系统和采样系统能满足以下基本约束:
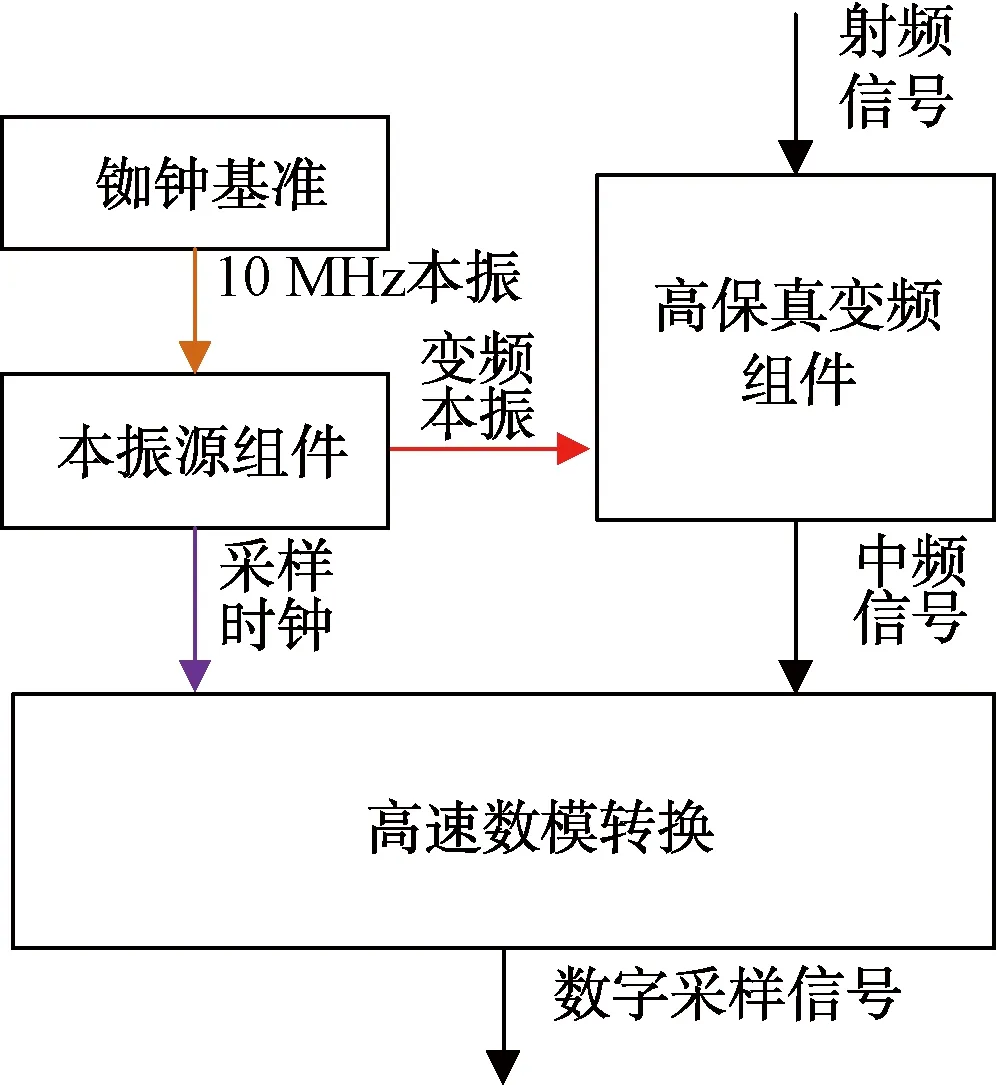
图2 个体识别接收与采样系统原理框图
(1)所有的本振都锁定于铷钟基准;
(2)滤波器的频率响应在全带宽内尽可能平坦;
(3)AD采样位数足够高(12 bit),能保证足够的瞬时动态范围;
(4)本振的相噪尽可能低。
3 信号处理系统的设计
雷达辐射源个体识别信号处理系统包含信号检测、参数粗测量、信号分选、个体特征提取、个体特征建库、个体识别等功能。其流程如图3所示。

图3 个体信号处理系统原理框图
雷达信号检测需要在实时性高、能够并行处理的现场可编程门阵列(FPGA)内实现,且不能采用侦察系统常用的信道化检测方法进行。一般采用快速傅里叶变换能量检测法或延时相关检测方法。延时相关检测方法和信道化检测方法的优劣在文献[4]中进行了详细的仿真和实测证明。通过2种方法的比较证明延时相关检测方法适用于个体识别的信号检测。
除信号检测外的所有信号处理工作都可以在通用处理器内完成。通用处理器可以采用至强处理器或专用的数字信号处理(DSP)芯片。由于通用处理器主频、信号处理算法库及多核多线程能力的提升,至强/飞腾处理器能够满足系统的高速处理需求。专用信号处理器一般无法满足大型识别数据库的需求,需要采用专用信号处理器+通用处理器的混合架构,由通用处理器完成识别数据库的管理及个体识别等工作。
因此,个体识别信号处理需要配置2块交叉连接设备(VPX)信号处理板卡,其中一块负责中频信号的高精度数模转换、信号检测和数据缓存;另一块完成参数测量、个体特征提取及个体识别工作。
4 个体特征提取及试验验证
雷达辐射源个体特征提取是个体识别系统设计的关键。本文采用正交变换法计算脉冲包络特征、Kay均值方法计算雷达脉内调制特征并开发了一种针对相参信号的频率指纹[5]和重复间隔指纹的提取方法。通过上述三域指纹能够满足多个同型辐射源个体识别的需求,并进行了内外场验证。导航雷达特别是中大型平台的导航雷达承担着部分预警、气象等功能,因此越来越向着相参体制发展。针对相参体制的雷达可以利用其相参特性提取精细的频率及重频特征。
(1)相参信号的频率指纹提取
相参信号的频率估计算法如下:首先估计每一个脉冲的载频,基于脉冲信号的相参特性,多脉冲联合进行更高精度的频率估计;最后所有被采集的脉冲信号用于获得最高精度的频率估计。以单音信号为例进行算法的论述,调制信号的估计需要首先进行调制参数估计工作,然后进行去调制工作,转化为单音信号的载频估计问题。
单音信号的模型为:
z(n+Kp)=Aej(φ0+(n+Kp)2πfΔ)+ε(n+Kp)
(1)
式中:n为采样点序号,n=0,1,…,N-1,N为每一个脉冲的采样点数;Kp为第p个脉冲的第k个采样点,p为脉冲序号,p=0,1,…,P-1,P为单次观测的总脉冲数;A为脉冲幅度;φ0为脉冲的初始相位;Δ为脉冲采样间隔;ε(n)为高斯白噪声。
解模糊过程为将模糊相位转换为非模糊相位的过程,解模糊后第p个脉冲相位表示为:
(2)
式中:f为载频。
估计每一个脉冲的载频和估计误差,式(2)可以重新写成向量表达形式:
φp=Bpθp+up
(3)
θp可以采用最小二乘方法进行估计,估计表达式为:
(4)
P个脉冲频率估计平均后得到最终的频率估计,表达式为:
(5)
根据载频估计的精度,所有的采样脉冲数据被分为Q段,每一段包含P′段,如图4所示。
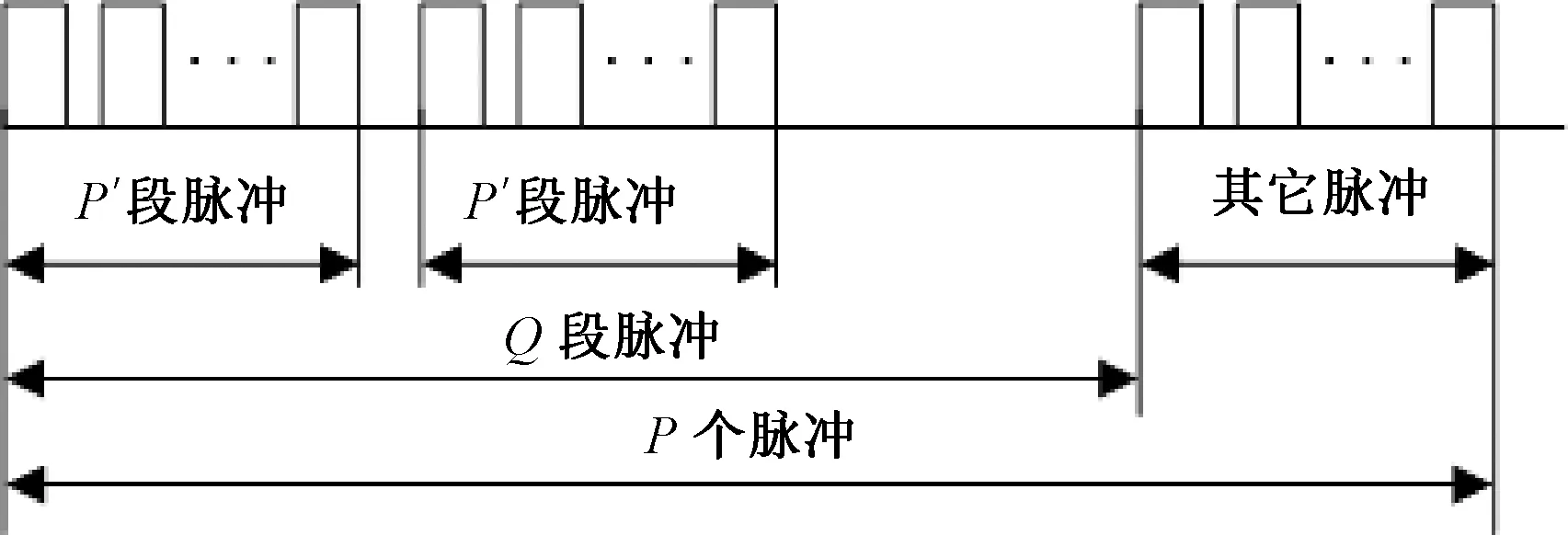
图4 脉冲分组示意图
φq,i(n+Ki)=φq,i(n)+2kq,iπ
(6)
类似于第一阶段频率估计方法,对θq的估计表达式为:
(7)

(8)
更高精度的频率估计可以通过平均Q组的频率估计值获得。最终可以获得载频及其方差的估计。针对3个同型罗德施瓦茨公司的信号源的频率估计与真值误差值如图5所示。
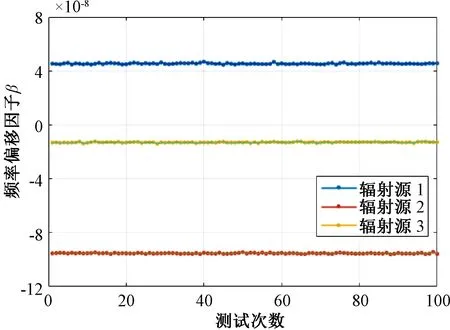
图5 3个同型辐射源载频误差测试
(2)试验验证
内场验证时采用2台8267D矢量信号源、1台E4438C信号源。针对信号源的测试结果为包络特征和脉内调制特征难以区分上述3部信号源。通过高精度频率指纹和重复间隔指纹可以稳定区分3部信号源。3部信号源的特征分布如图6所示。
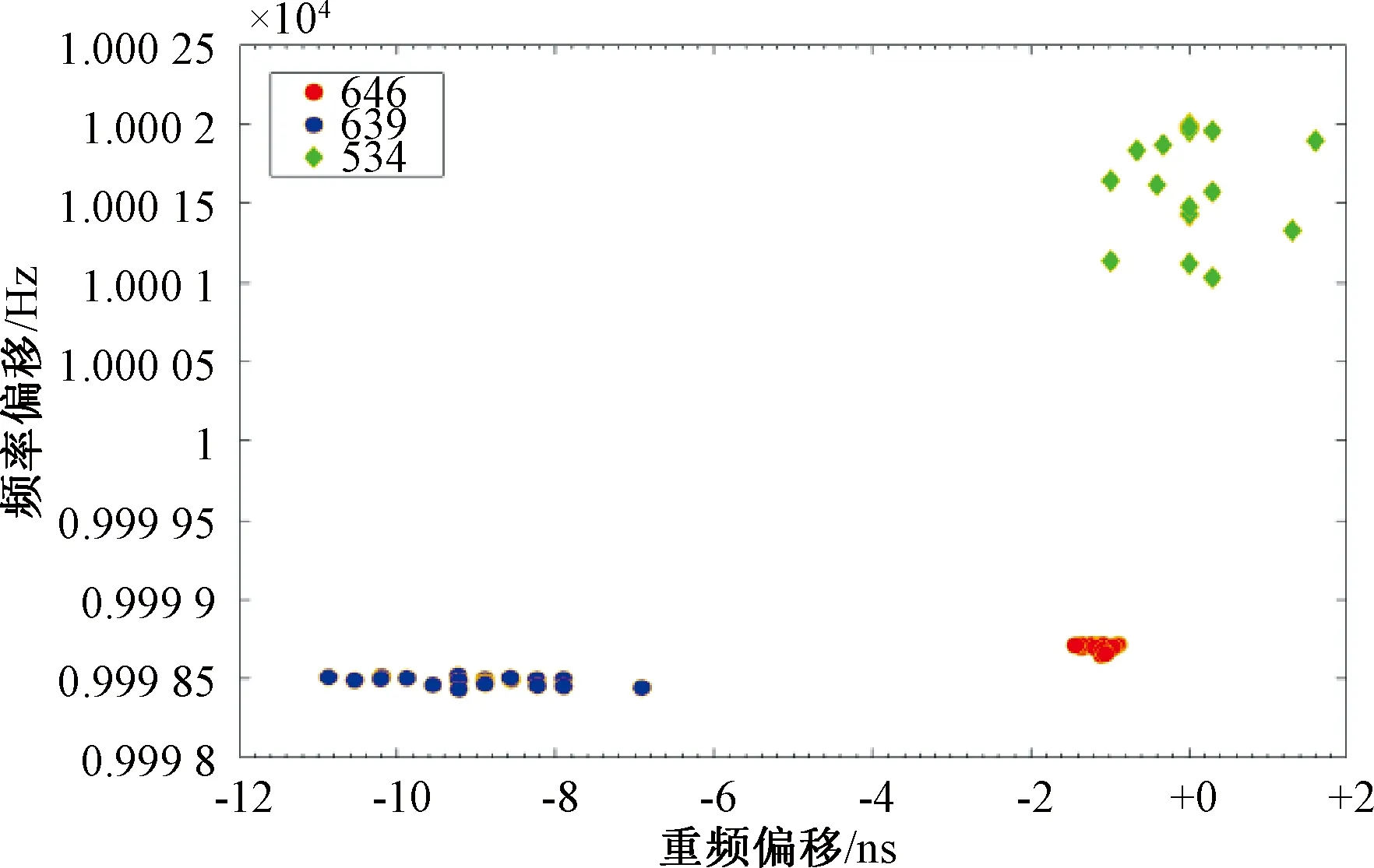
图6 信号源的频率和重频指纹
针对真实雷达的测试采用外场测试方法进行,提取了2部雷达的前沿特征、脉内调制特征和高精度重复间隔特征。
2部雷达的前沿特征如图7所示。2部雷达脉内调制曲线特征[6]如图8所示。2部雷达前沿特征与重复间隔特征的分布如图9所示。

图7 2部雷达的前沿特征

图8 2部雷达脉内调制特征
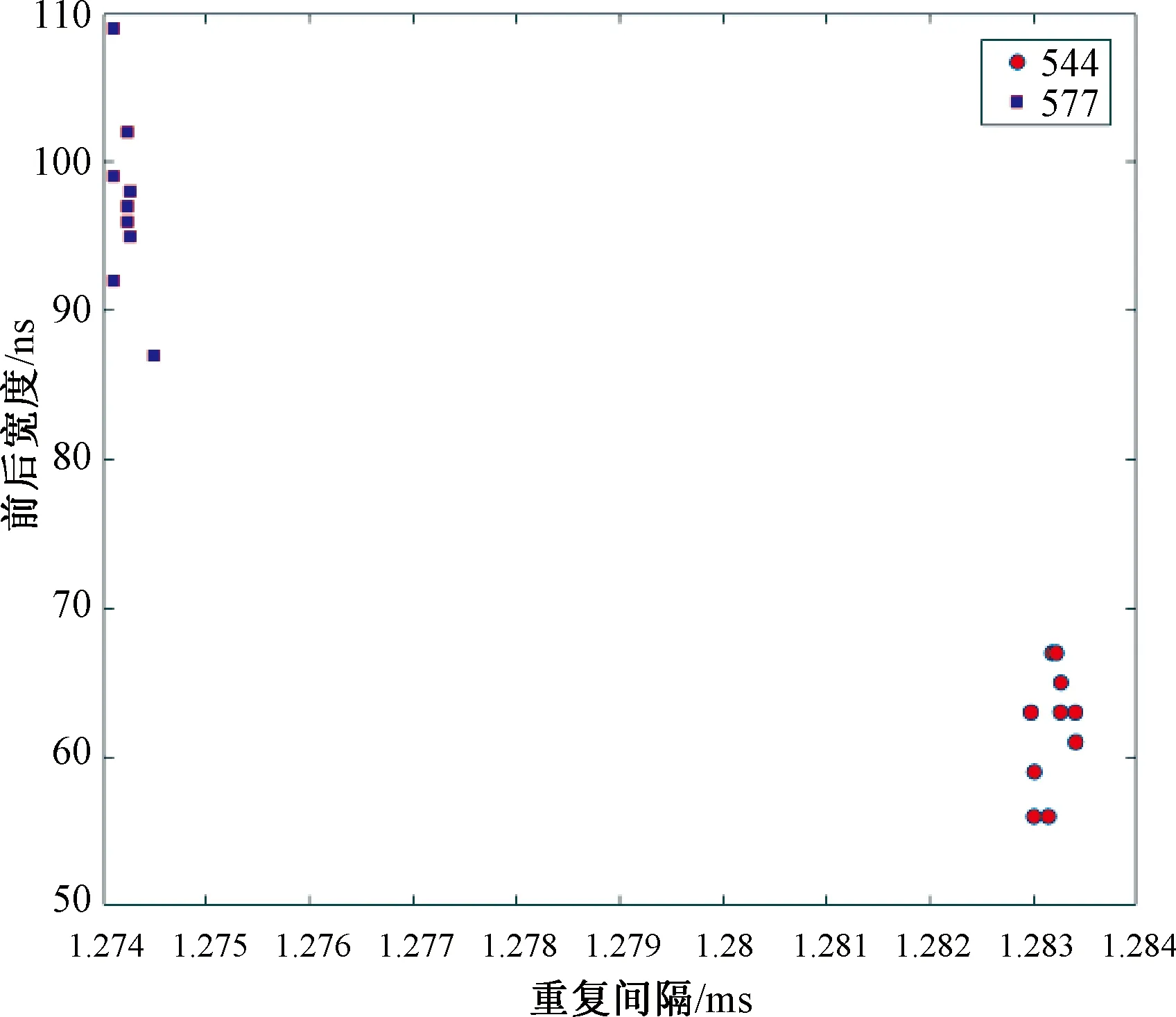
图9 2部雷达前沿特征与重复间隔特征分布图
通过上述试验验证,个体特征提取模块提取的雷达辐射源个体特征有效,能够有效区分脉冲体制的雷达辐射源。
5 导航雷达个体识别
未来辐射源个体识别的重要目标是安装在商船和许多游艇上的商用导航雷达。对于许多应用程序来说,将发射器与给定的平台关联起来并随后重新识别发射器及其载体平台的能力是一个重要属性。导航雷达带来了许多重要而困难的挑战。
首先,已经建造了大量这样的雷达,而且每天都有更多的雷达出现,单是数据处理问题就可能是巨大的。第二,经典的雷达参数(频率、脉宽、脉冲重复间隔、扫描速率等)是非常相似的(无论哪个制造商)。因此,经典的雷达参数甚至不能帮助获得初始型号识别。第三,每个雷达至少有2种,偶尔有3种工作模式。至少,在港口短距离操作时采用短脉冲宽度(80~160 ns)模式,在海上操作时采用较长脉冲宽度(550~1 000 ns)模式。这些模式使收集和再识别问题复杂化,因为它们提供了非常不同的脉内特性。
众多的目标对象、经典参数集中在一定范围内且不稳定、雷达在港口和远海工作于多个模式和脉内调制特征类似是导航雷达面临的4个重要问题。因此,传统的个体识别解决方案是不够的,需要更加复杂的个体识别方案。
首先,在数据采集和处理时,必须非常谨慎,保证建库数据的真实性,否则这种错误将是灾难性且不可恢复的。必要时需要实时的船舶自动识别系统(AIS)及其他识别信息进行支撑,排除非关注目标,并对关注目标进行跟踪,学习并建库确认。
其次,所有可用的射频信息必须仔细测量和存储。保证导航雷达的算法具备扩展性,在不能够进行区分时,通过在线的特征选择和事后的算法升级保证个体识别的性能。
最后,必须构建鲁棒识别决策树,以便根据识别证据做出关于匹配的最终决定。
图10给出了一个导航雷达个体识别的原理框图。通过综合识别系统发现环境中关注的未识别目标,并对其进行数据采集,通过对中频数据的参数测量分析,给出雷达的重频特征、脉宽、波束形状和扫描速度等,并识别出导航雷达的工作模式。接着提取雷达的无意调制特征,并结合识别可靠性因子和该模式下的雷达导航雷达个体特征库,识别出雷达辐射源个体,上报作战系统。
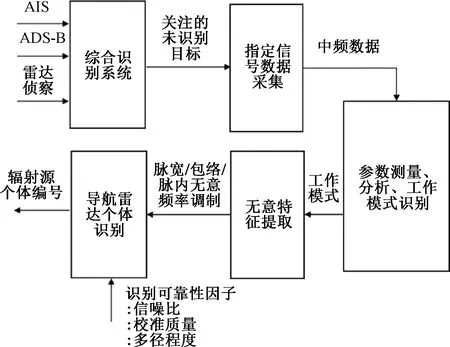
图10 导航雷达个体识别框图
6 导航雷达实测验证
对2部导航雷达进行保真数字采样,分别采用包络特征和瞬时频率特征进行个体识别。2部导航雷达的上述两维特征如图11所示。
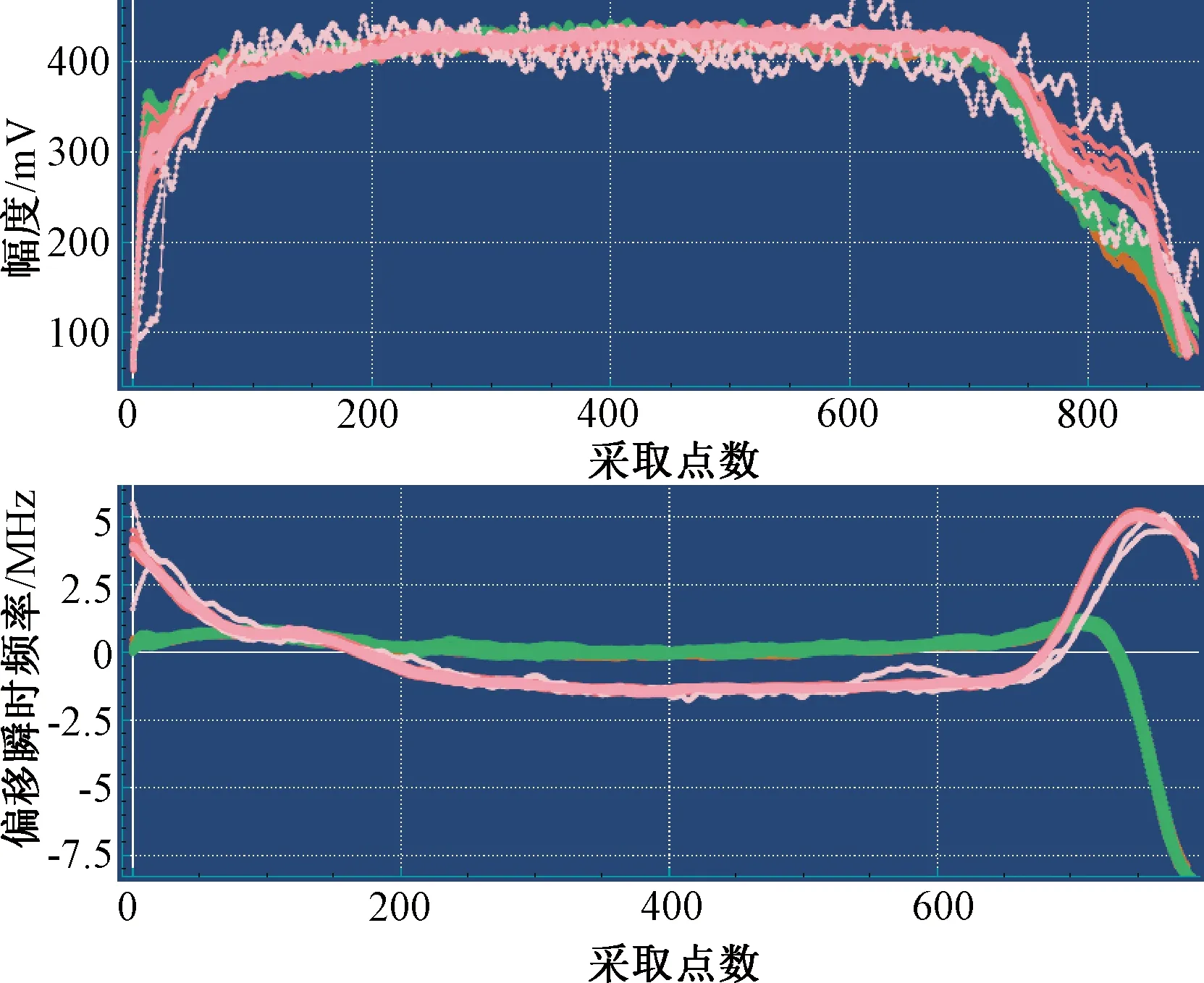
图11 2部雷达的包络和时频特征对比图
通过将两维特征输入到1 000×200×2的BP神经网络进行训练和识别,最终的识别准确率为82.3%。
7 结束语
本文针对脉冲体制雷达辐射源的个体识别分析了接收系统和处理系统的需求,提出了射频接收系统和信号处理系统的设计方案;并针对提出的包络、脉内调制特征、高精度载频和重复间隔特征方法进行了内外场验证,验证了个体识别系统设计的可行性;针对导航雷达的个体识别问题,分析了导航雷达个体识别面临的问题,并针对性地提出了个体识别的方案。
猜你喜欢
数学物理学报(2022年3期)2022-05-25
北京航空航天大学学报(2020年10期)2020-11-14
数学物理学报(2019年5期)2019-11-29
雷达学报(2018年5期)2018-12-05
信号处理(2018年5期)2018-08-20
信号处理(2018年5期)2018-08-20
信号处理(2018年8期)2018-07-25
信号处理(2018年8期)2018-07-25
雷达学报(2018年3期)2018-07-18
中成药(2017年12期)2018-01-19