基于Simulink设施农用机械多源动力系统设计及能量管理仿真
2023-05-12 07:03姜欢龙廖贵明李青涛陈兴海李佳阳严重勇
山东农业大学学报(自然科学版) 2023年2期
姜欢龙,廖贵明,李青涛,2,陈兴海,李佳阳,严重勇
基于Simulink设施农用机械多源动力系统设计及能量管理仿真
姜欢龙1,廖贵明1,李青涛1,2,陈兴海1,李佳阳1,严重勇1
1. 西华大学机械工程学院, 四川 成都 610039 2. 西华大学现代农业装备研究院, 四川 成都 610039
针对小型纯电动设施农用机械在较大功率工况作业受动力电池比能量限制的问题,设计一种以电网电源为主,小容量动力电池和小型增程器为辅的多源动力系统驱动方案。结合设施农业实际的作业需求,采用规则控制策略和模糊控制策略结合的能量管理方法,基于Simulink建立系统模型进行仿真分析。结果表明:在中载作业中,模糊控制下的小容量动力电池和小型增程器可以满足续航需求,动力系统中动力电池质量相较于纯动力电池供电系统降低了48%,体积降低了35%;在重载作业中,作业相同时长,多源动力系统的动力电池质量相较于无模糊控制的多源动力系统降低了70.25%,体积降低了66.82%,相较于纯动力电池供电系统降低了86.48%,体积降低了83.1%。本文为小型纯电动农用机械受到动力电池质量和体积大的约束问题提供一种解决思路。
农用机械; 动力系统; 能量管理
自本世纪以来,由于日益严重的碳排放问题和国家提出双碳政策,提倡节能减排,促使国内学者加快了对农业机械驱动动力系统朝向清洁能源方向的转型。据统计,仅以柴油为动力的农用机械每年消耗的柴油量约达到我国动力机械柴油消耗总量的65%~70%[1],对于传统农用机械动力来源单一,工作效率低且污染严重的问题,电动化技术是农用机械节能减排的一项有效措施[2]。近几年,利用电动化技术研发设计的纯电动、双电源和搭配增程器的串并联式动力系统驱动的农用机械得到高速发展,降低了一些碳排放[3,4]。然而在由于在纯电动系统、双电源动力系统中电池的能量密度难以满足重载作业的需求[5],大容量电池成为保证其作业时长和大功率需求的必要条件,这造成整车体积大,质量大的缺点[6];对于搭配增程器的串联式动力系统可以在有限程度上降低对电池的大容量需求[7,8],但所需较大功率增程器又会较大程度影响整车质量与体积。针对以上问题,采用多种动力源组成动力系统可以满足小型农用机械复杂作业工况的功率和能量需求,同时也是一种有效解决上述问题的方案。
目前以风电、光伏为代表的分布式电网电源是我国电力行业发展的重要举措[9],针对有限范围内作业的设施农业机械动力系统,采用分布式电网电源搭配小容量动力电池和小型增程器组成的多源动力联合驱动作业方案可大程度降低排放,且分布式电网和电网相连可以为动力系统提供源源不断的电能,成本低廉。与此同时,多源动力系统的能量管理也是一项关键技术,合理的能量管理策略可以有效保护电源安全,保证整车作业电机的功率需求和能量需求,延长作业时长。赵静慧研究了增程式电动拖拉机驱动系统设计方法,对增程器采用定点能量管理策略进行仿真分析,对比传统拖拉机,降低了油耗,并提升了动力性能[10]。徐立友设计了燃料电池/蓄电池混合动力电动拖拉机动力系统的结构和功率流,制定了一种以保证燃料电池最优特性和蓄电池合理放电为前提的模糊控制策略,仿真结果表明降低了等效氢气消耗量[11]。夏长高提出一种复合电源(动力电池和超级电容)电动拖拉机结构,根据需求功率和复合电源电荷量制定了复合电源放电的模糊控制规则,通过仿真分析得到整车的动力性能和经济性均有提升[12]。
本文针对设施农业中小型农业机械受动力电池容量制约问题,设计一种以分布式电网电源搭配小容量动力电池和小型增程器的多源动力的联合供电系统,提出不同作业工况下的电源工作模式,并对多源动力系统采用规则控制策略+模糊控制策略的能量管理,达到满足不同作业工况下的动力性能需求和工作效率,延长动力电池寿命的目的。
1 多源动力系统设计
电网电源作为一种便捷高效能源早在19世纪末便应用在国外的拖拉机上,但由于国外主要以大田为主,线缆限制了其作业范围[13],作业机具功率受限等原因而被放弃继续使用。在我国的设施农业田地中,农用机械只需要在一定范围内进行负载作业,并满足在一定里程内的转运需求即可。电网电源以线缆传递电能的方式可以在一定范围内提供一定功率,输出源源不断的能量以满足作业需求,小容量动力电池和小型增程器组成的动力电源可以满足无电网电源时不同田块间的转运及其他轻中载荷作业,并在电网电源功率供应不足时,输出功率满足动力性能需求,同时增程器可以避免动力电池长时间的大电流放电,当电网电源或增程器在功率富裕的时候可以给动力电池进行补电,三者联合供电共同构成多源动力系统。针对履带式小型设施农用机械搭建多源动力系统构型如图1所示,其供电路线拓扑结构图如图2所示。
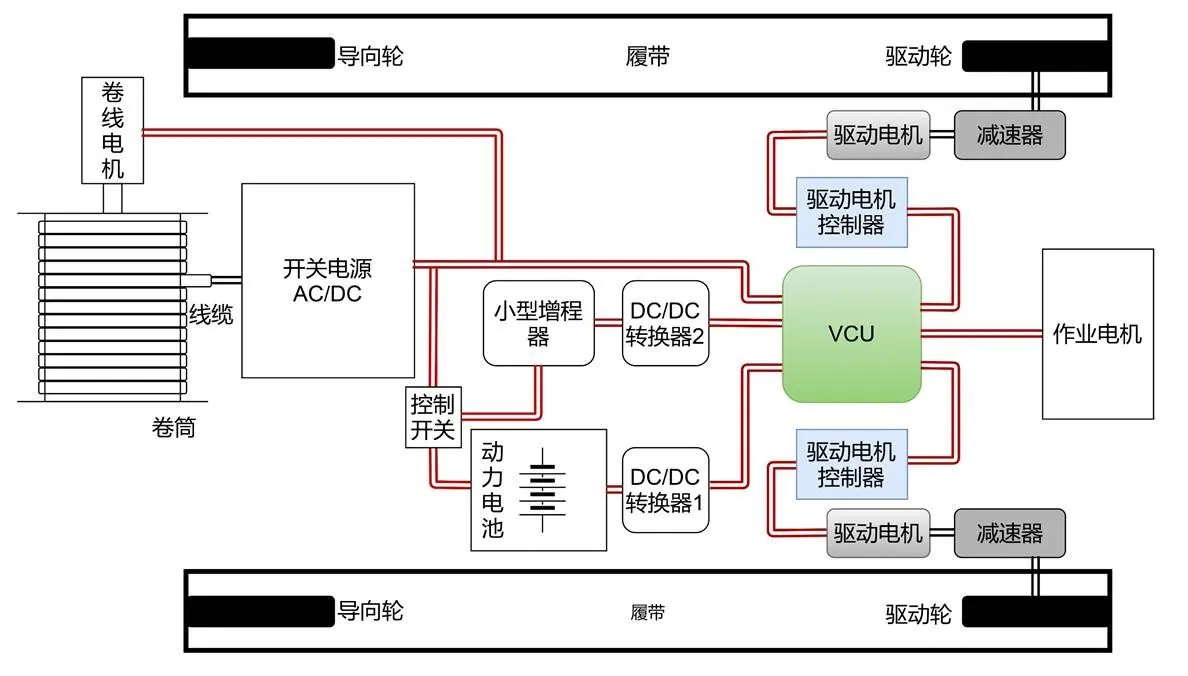
图1 多源动力系统设计构造

图2 电路拓扑结构
由线缆为载体传输电能的电网电源经开关电源(AC/DC)整流降压后稳压输出,与动力电池和DC/DC转换器、小型增程器和DC/DC转换器输出的直流电压时刻保持一致,其中开关电源和DC/DC转换器中已设置电路,避免其发生环流。
2 能量管理策略
能量管理策略是设计和开发多源动力系统的关键技术,直接影响整车的动力性能和经济性能[14,15]。针对本次设计的多源动力驱动的纯电动车辆可能存在的充电不便、耗电快等问题,同时为了降低能量使用成本,采用基于规则控制策略和模糊控制策略优化多源动力系统的输出功率和能量,使系统具有良好的鲁棒性和动态优化的优点。
2.1 能量管理原则
本着优先采用清洁能源>低成本能源>高效率能源的优先级原则,对是否采用电网电源供电两种作业场景进行分类。
农用作业车在田间进行负载作业时,优先选用电网电源供电,其次使用动力电池和增程器供电。根据图1的动力系统构造,只有在电网电源工作时,卷线电机负责控制收放线缆,因此卷线电机应始终由电网电源供电。此外,在作业间隙,电网电源对非满电的动力电池给与补电。在此工况下,设置传感器对三种动力源进行电流监测,根据整车动力性能需求和控制策略分别先后启动各动力源进行供电。其主要目的是充分利用电网电源的高效能源,减少动力电池充放电造成能量转换丢失,避免增程器在高能耗区工作,同时保证整车的动力性。
农用作业车在田间长距离运输时,不采用电网电源供电,动力电池和增程器组成联合电源给驱动电机供电,为保证增程器处于经济油耗区,小功率作业需求由动力电池供能,当锂电池馈电时,启动增程器对其进行补电;对于较大的功率需求,采用联合供电,优先满足增程器经济油耗区的发电功率,在此工况下,采用模糊控制策略,根据输入功率大小和动力电池的电荷量大小适时调整其输出功率[12]。其主要目的是保证整车动力性能,同时避免小容量动力电池大电流放电产生热量造成安全隐患与能量浪费,并延长动力电池寿命。
综上所述,对电网电源采用规则控制策略,限定电网电源输出最大功率,避免超过线缆可承受最大电流范围和过度发热出现安全问题。当需求功率大于电网电源可提供的功率时,小容量动力电池和小型增程器组成的联合动力系统与电网电源共同为作业电机供电,其中对动力电池采用模糊控制策略。
2.2 基于规则控制能量管理策略
电网电源可以提供更多的能量,电网电源输出功率越大,经开关电源转换后效率将越高。根据上述能量管理原则,对电网电源采用规则逻辑门限进行控制,设定电网电源提供的功率上限阈值为P,卷线电机需求功率为1,驱动电机需求功率为2,作业电机需求功率为3。当1+2+3<P时,始终由电网电源供电,否则多源动力介入给系统供电。当多源动力系统介入后,增程器发电消耗燃油,应尽可能保证其工作区间在经济油耗区,并且避免反复启停,动力电池由于容量有限,因此根据增程器的低能耗区间制定规则控制策略,小功率的能量需求应由动力电池满足。
2.3 模糊控制能量管理策略
在多源动力系统混合供电时,若针对动力电池和增程器采用规则控制策略,可能导致动力电池在使用过程中出现过度充放电,增程器发电功率不处于最优耗油区间,模糊控制可以随着外载荷变化情况适时调整各动力源的充入或输出电能大小,使其根据不同时间的使用情况合理确定其放电能力,因此要对动力电池和增程器联合供电时建立模糊控制策略。
本文对其放电控制的模糊控制输入参数为:某时刻的负载需求功率与电网电源提供功率之差占动力电池和增程器联合供电功率的比例系数K、动力电池电荷量SOC;输出参数为:模糊控制计算后分配给动力电池供电的功率占比K。采用Mamdani推理方法[16,17],输入和输出约束条件见下式。
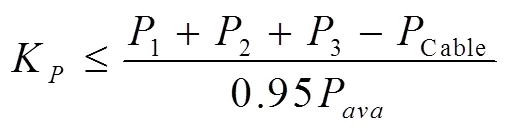
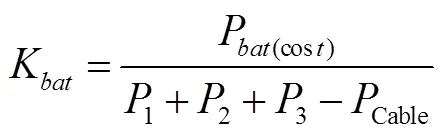

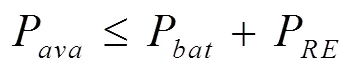

式中:P为动力电池和增程器联合供电可提供的最大功率;P(soct)为动力电池经模糊控制处理后的放电功率;P为动力电池提供的功率上限阈值;P为增程器提供的功率上限阈值
在模糊控制中,设定的模糊子集越多控制效果越好,但子集数量一般不超过七个[18]。对输入参数和输出参数构建隶属度函数,输入功率比例系数K的论域为[0.2,1],其模糊子集为[LP, SP, MP, BP, HP],分别对应{极小,较小,中等,较大,极大};动力电池荷电量状态SOC的论域为[0.2,0.9],其模糊子集为[LB, SB, MB, HB],分别对应{极低,低,中,高};由于动力电池作为最后工作的电源,且输出功率有限,故定义输出量K的论域为[0, 0.5],其模糊子集为[LBP, SBP, MBP, BBP, HBP],分别对应{很小,正小,正中,正大,很大}。K、SOC、K的隶属度如图3-5所示。
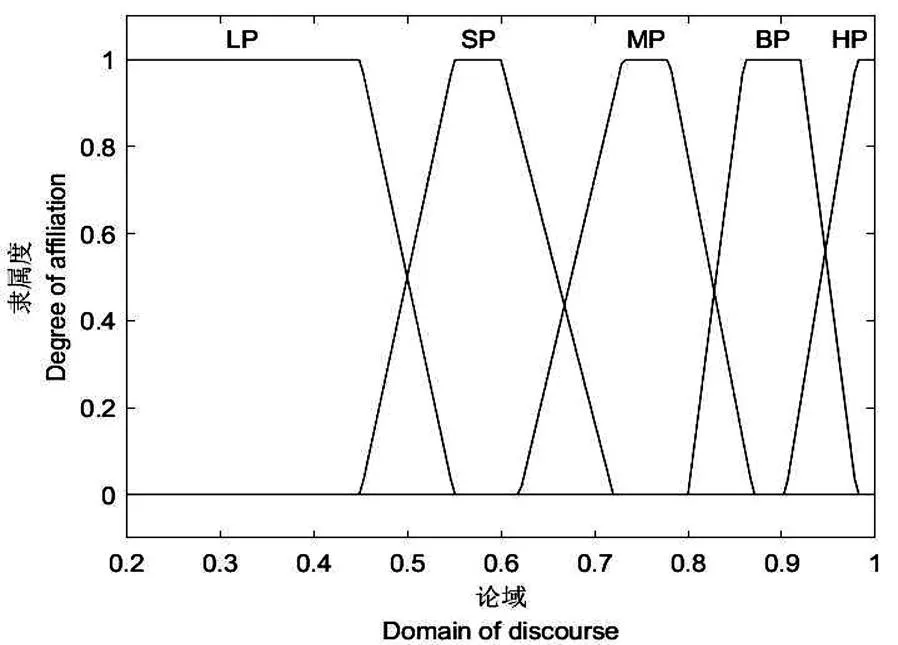
图3 输入功率比例系数Kp隶属度函数
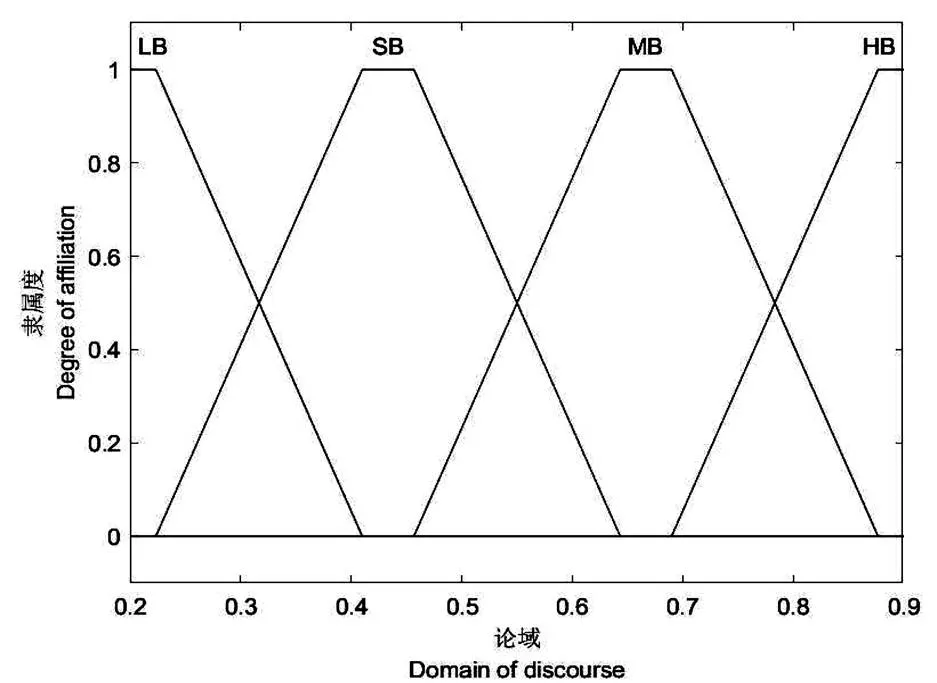
图 4 动力电池荷电量状态SOCBat隶属度函数

图5 功率分配因数KBat隶属度
对输入输出量建模模糊控制规则,如表1所示。
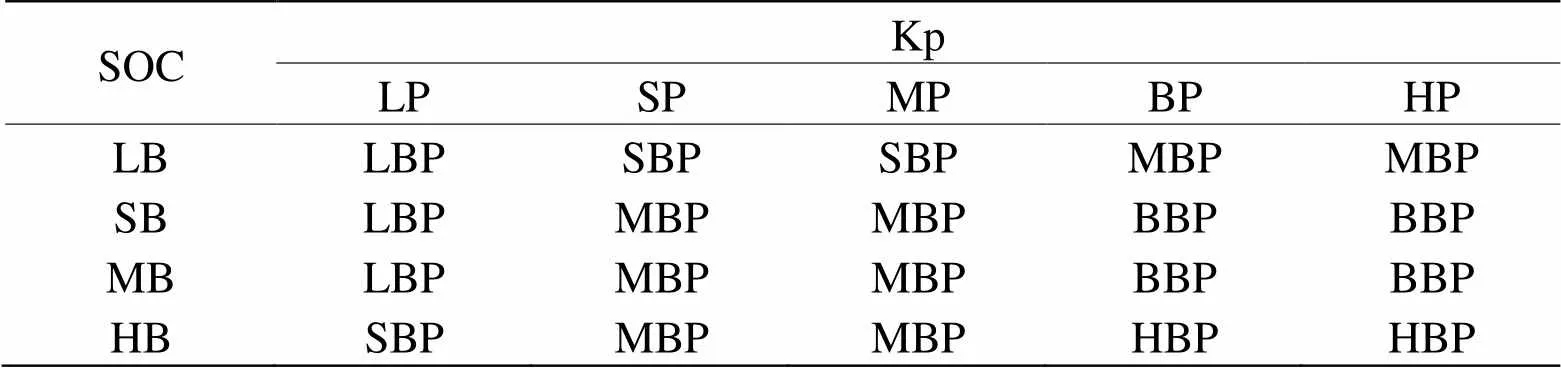
表1 需求功率模糊控制规则
其三维关系面如图6所示
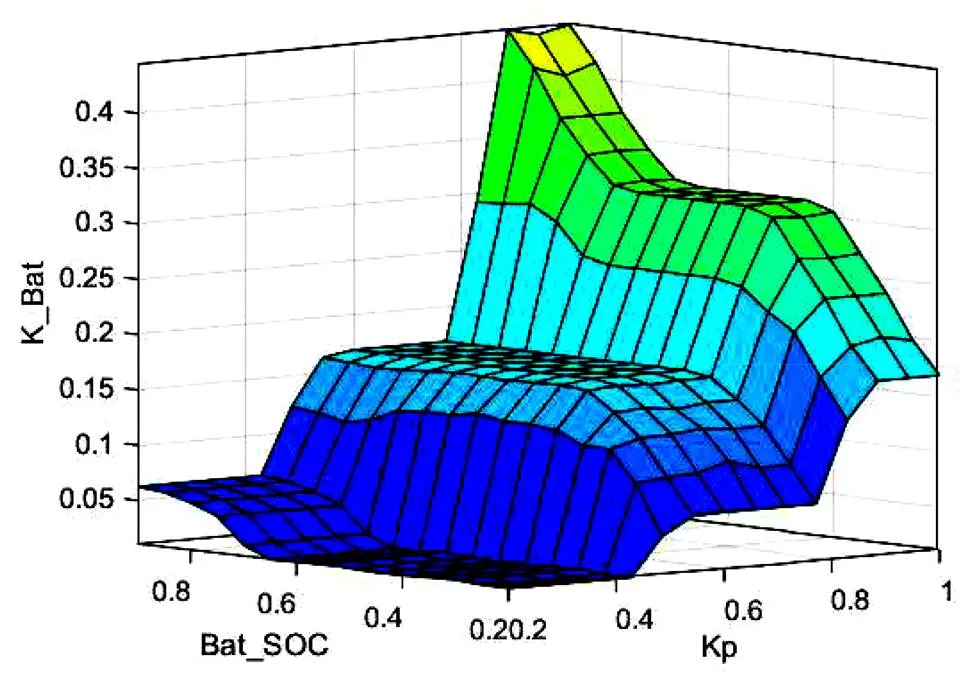
图6 输入与输出三维关系
3 作业工况及动力元件分析
3.1 作业工况模型
设施农业中通常要进行运输、喷药、浇灌、除草、起垄和旋耕等作业,通常可根据作业负载的功率需求相对动力系统提供的最大功率占比大小可分为轻载作业、中载作业和重载作业[5]。轻载作业多以空载转运为主,本文不对轻载作业进行研究,以中载作业满载高速运输和重载作业旋耕为例,分析作业功率需求。
3.1.1 中载作业工况将农用机械及运输物品从某地到另一地进行转运的需求功率通常与负载和速度大小相关。满载高速运输时只有驱动电机经减速器后驱动车辆作业,其功率需求见公式6。

由于所设计为履带式车辆,最大车速为远小于轮式车辆,工作环境为平整路面,日常多为匀速作业,因此爬坡、风阻功率和加速功率可忽略,即式,履带车辆阻力系数见式7、8。
式中,1为总传动效率,为整车重力,为阻力系数(其中1为附着系数,2为履带内部阻力系数,3为惯性阻力系数),为行驶速度,为转向阻力系数,为履带接地长度,1,2为两侧履带行驶速度,为轨距。
3.1.2 重载作业工况旋耕作业中牵引阻力相对较大,需求功率较大,在进行旋耕作业时,车辆低速行驶并给旋耕电机供能,其功率需求[19]见式9、10、,其中K计算见式11。



式中,为转矩,为角速度,为随机函数,取1~1.2,模拟卷线时刻的线缆震荡消耗功率;为耕深;K为旋耕比阻;K为切土压强,取11~11;1为耕深修正系数,取0.85~0.95;2为土壤含水率修正系数,取0.9~0.92;3为残茬植被修正系数,取0.85~0.95;4为作业方式修正系数,取0.66~0.68。
3.2 动力元件分析
3.2.1 电网电源电网电源输出为220/380 V交流电,在校正电压与电流的相位差,整流降压至本文设计电压平台后,为驱动电机及作业电机供电,在多源动力系统中应保证线缆安全性。电网电源的数学模型应满足式12、13。

式中:电网为电网供电功率;为功率因数;1为开关电源效率;线径max为线径对应线缆所能承受最大功率。其中和1的取值受需求功率大小的影响。
3.2.2 动力电池动力电池在充放电过程中能量转换有一定量的损失[20,21],并且在此过程中的电压和电荷量变化较为复杂,呈现非线性的特征。因此对动力电池充放电电流和电压变化进行精准建模较为困难。采用Rint模型建立等效仿真模型可较为方便准确模拟动力电池充放电过程[22,23],其电流、电荷量如下。

式中:I为动力电池充放电电流;U为动力电池开路电压;R为动力电池充放电内阻;PBat为动力电池充放电功率;SOC为动力电池t时刻的电荷量;0为动力电池初始时刻电荷量;C为动力电池容量。
3.2.3 增程器小型增程器是一种小功率的发电机,由于其体积小,质量轻便于携带的优势,广泛应用于电动三轮车等小动力车辆充电的一种备用电源[24,25],目前也有应用于一些小型电动农业机械。使用小功率增程器,可以在动力电池馈电或输出功率不足时及时输出电能,但同时需要避免增程器反复启停带来的振动和油耗。但目前尚未有学者专门研究过小型增程器油耗曲线,参照某电动汽车增程器万有特性曲线[26],以某品牌小型增程器以额定转速发电,最大油耗480 g/kWh为例,可得到该品牌小型增程器的燃油消耗率变化趋势如图7所示。其中燃油消耗计算公式如下。
式中:P为增程器有效输入功率;Pmax为增程器最大发电功率;为有效燃油消耗率;为每小时的燃油消耗量。
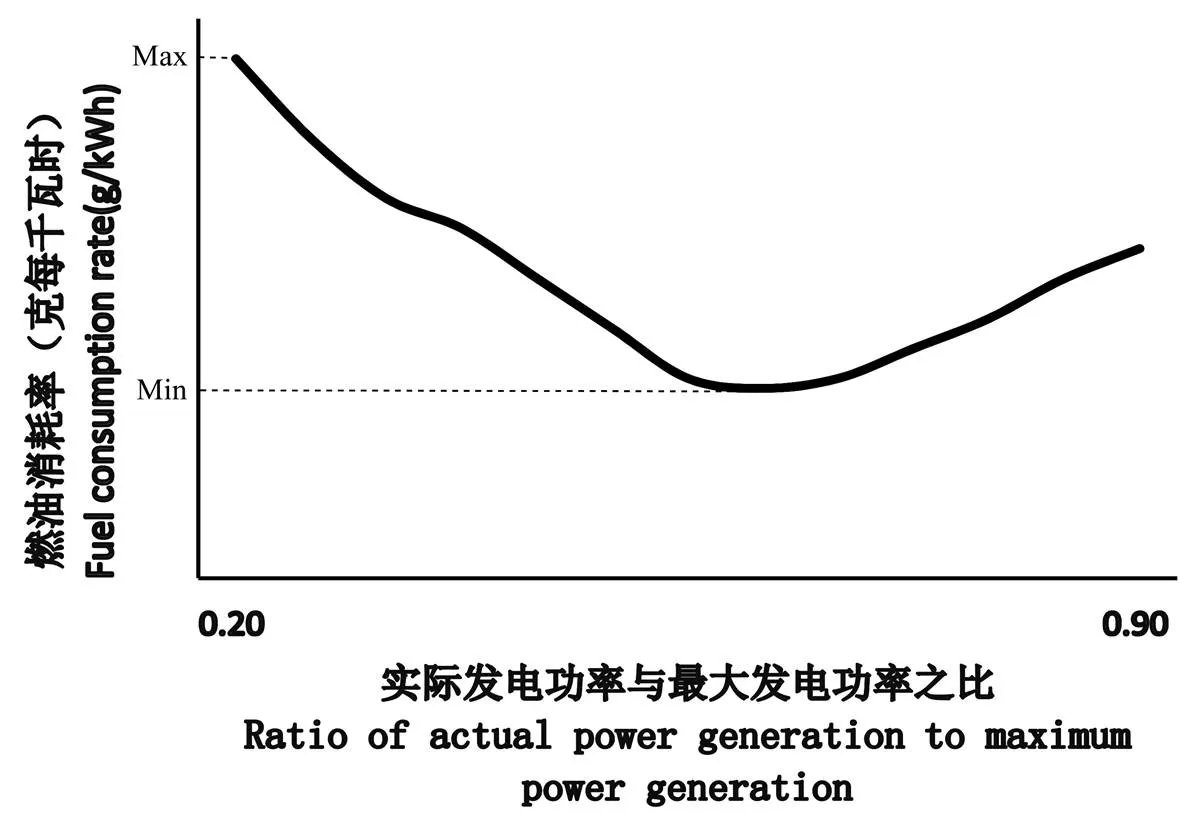
图7 小型增程器发电油耗图
4 建模与仿真分析
4.1 基于Simulink搭建系统模型
根据能量管理策略及模型分析搭建系统模型,使用电网电源的系统模型如图8所示,不使用电网电源的系统模型如图9所示。
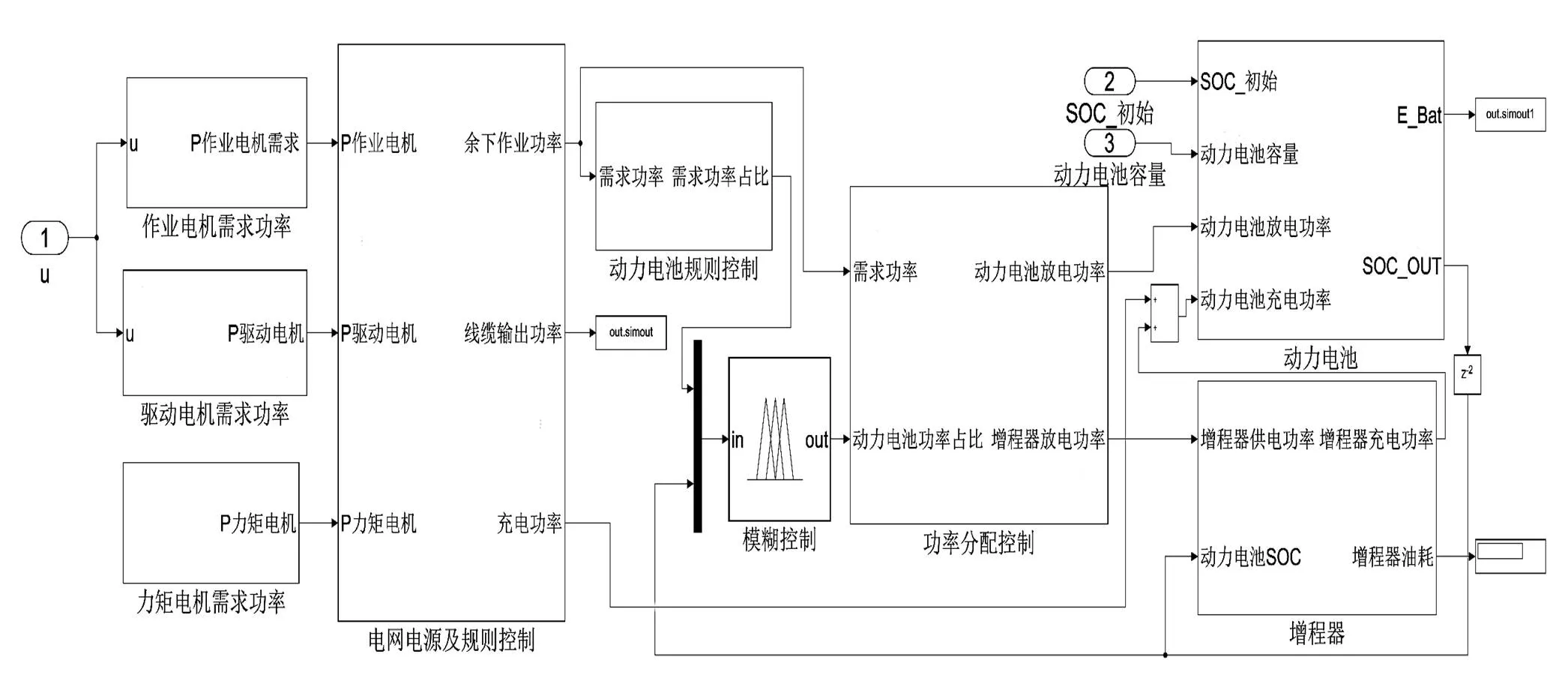
图 8 有电网电源的系统模型
Fig.8 A model of the system with grid power
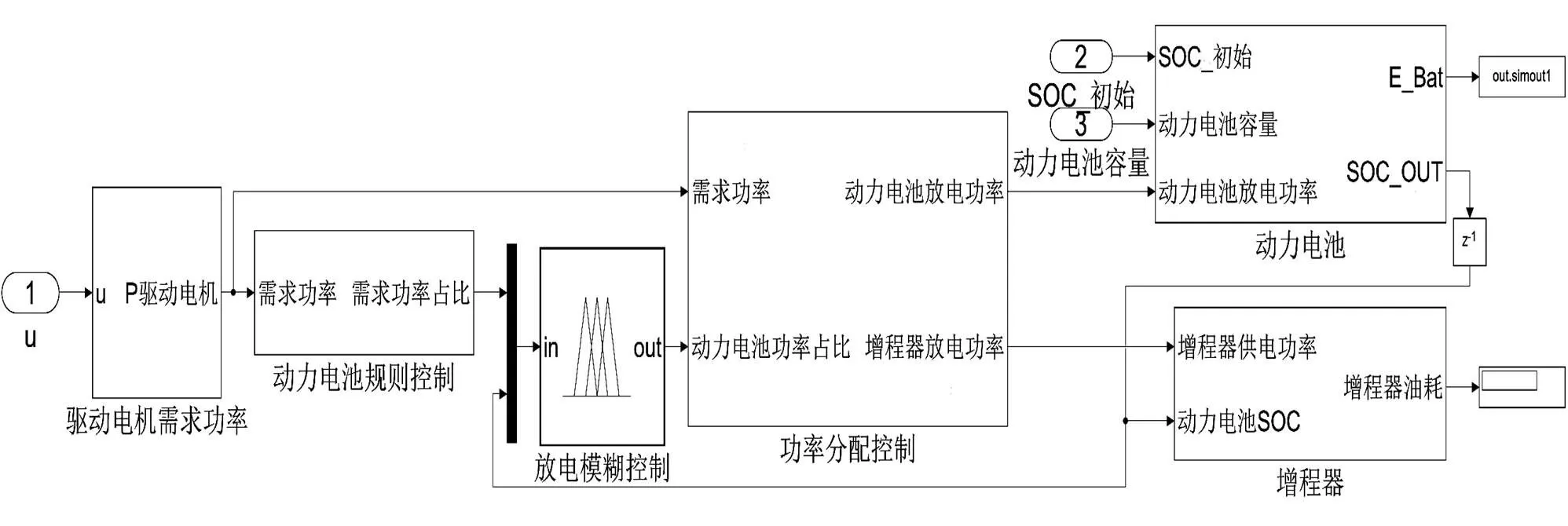
图9 无电网电源的系统模型
对比使用电网电源的多源动力系统模型和无电网电源的复合动力系统模型中,其主要区别在于:①力矩电机仅在使用电网电源时工作,且直接由电网电源进行供电驱动,并对动力电池进行补电;②在无电网电源的系统模型中,增程器根据动力电池电荷量大小判断是否补电,系统输出功率相对较小,应避免重载作业。
4.2 仿真设置
农用机械在地间的作业普遍具有周期性,其表现为:直行(机具作业)——转弯(机具不作业)的交替进行。对于长宽确定的地块,确定不同工况下的作业速度和转弯速度进行仿真可得到其作业效率,能耗情况。
对农用机械进行仿真作业,设定条件如下:
①地块长为66.7 m,宽为10 m,单块地的作业面积为0.0667 hm2。
②不使用电网电源的中载工况,设定满载运输直行速度为7.2 km/h,无转弯作业。
③使用电网电源的重载工况,设定直行速度为3.6 km/h,转弯速度为1.8 km/h,作业幅宽为1 m。
将设计的多源动力电驱动小车参数输入系统仿真模型进行仿真分析。
系统中开关电源和DC/DC等电子元器件的表2率随电网电源、动力电池的输出功率变化,根据某产品试验分析效率数据建立仿真模型,在此不过多叙述。动力元件中线缆可以通过卷筒置于田地边缘处,不占据底盘空间和质量,增程器的体积是动力电池的1.6倍,质量是其1.08倍。
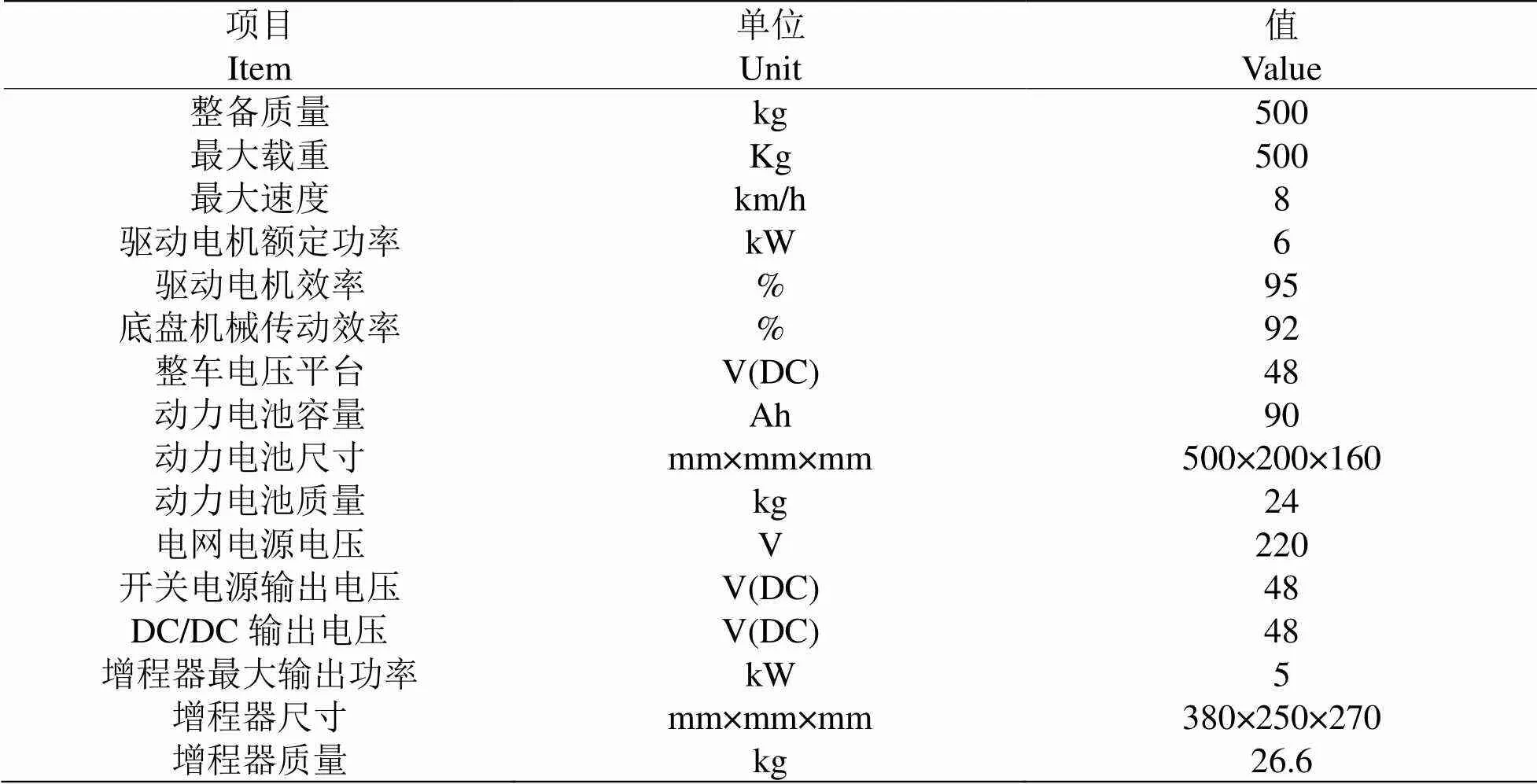
表2 整车主要部件设计参数
4.3 仿真结果
4.3.1 中载作业仿真结果对于中载作业工况中的较长距离转运作业,不宜使用电网电源供电,且转运需求功率相对较小,动力电池和小型增程器组成的动力系统可以满足其功率需求。
在中载作业工况仿真中,分析动力电池电荷量仿真图10,在满载以7.2 km/h的速度下,无电网电源至少可以持续作业3 h,即续航21.6 km,其中小型增程器消耗燃油约为1372 mL,满足农用机械在田间转运的要求。通过图11可以得到如果采用纯电池供电,峰值电流达到96.8 A,平均放电电流为84.5 A,而采用模糊控制的双电源系统供电,动力电池峰值电流为24.2 A,平均放电电流为21.1 A,能够避免动力电池大电流放电,保护其使用寿命,作业相同的时间,动力系统中动力电池质量相较于纯动力电池供电系统降低了48%,体积降低了35%。
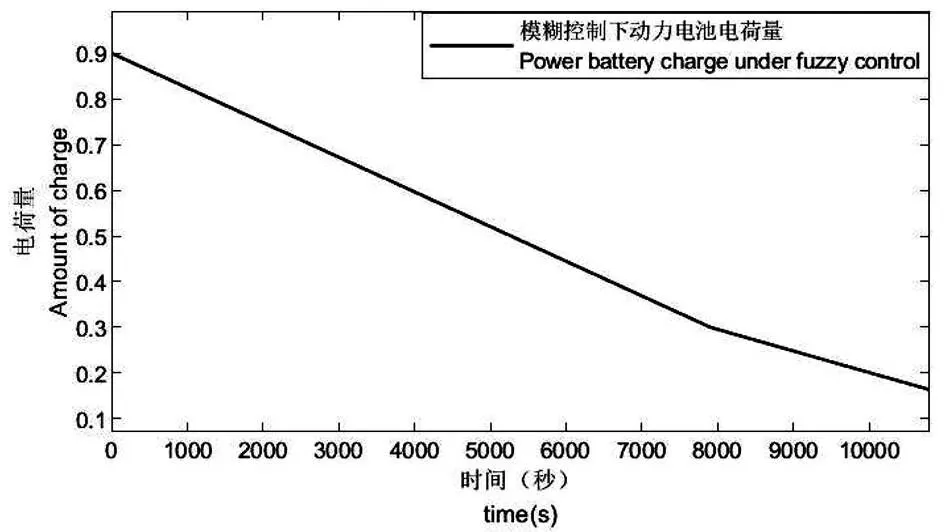
图10 动力电池电荷量变化
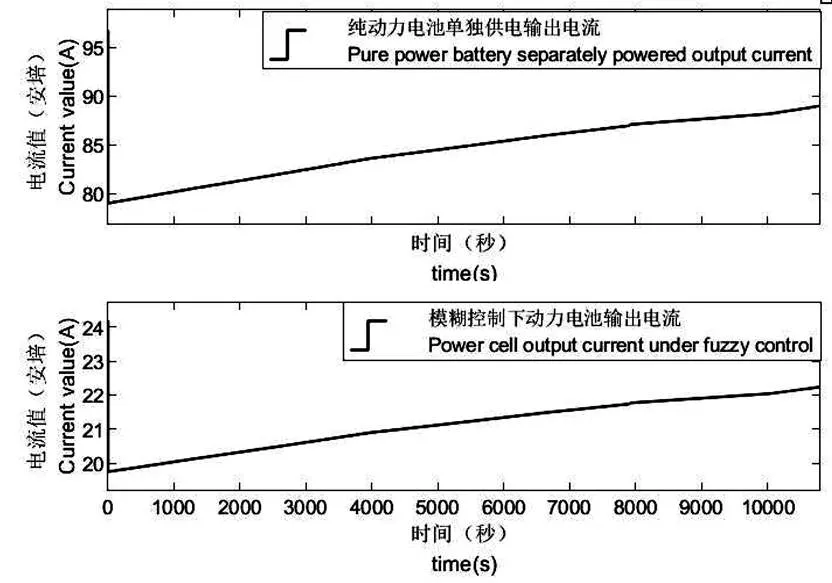
图11 纯动力电池与模糊控制动力电池放电电流对比
4.3.2 重载作业仿真结果在重载作业仿真中,设置耕地深度为15 cm。分析动力电池电荷量仿真图12,使用多源动力系统供电可以进行6 h旋耕作业,小型增程器耗油约为2838 mL,其作业效率可达到每小时0.322 hm2,其中在作业间隙电网电源对动力电池进行了补电(图13)。
通过图14可以看出如果采用纯电池供电,峰值电流达到227.2 A,平均放电电流为201.1 A,每小时作业耗电8.2 kWh,选用的动力电池将占据整车的大部分体积和质量;采用无模糊控制的多源动力系统供电,峰值电流为113.3 A,平均放电电流为77.1 A,每小时作业耗电3.7 kWh;在多源动力系统中加入模糊控制后,动力电池放电峰值电流达到41.7 A,平均放电电流为11.1 A,每小时作业仅耗电0.53 kWh。作业相同的时间,多源动力系统的动力电池质量相较于无模糊控制的多源动力系统降低了70.25%,体积降低了66.82%,相较于纯动力电池供电系统降低了86.48%,体积降低了83.1%。
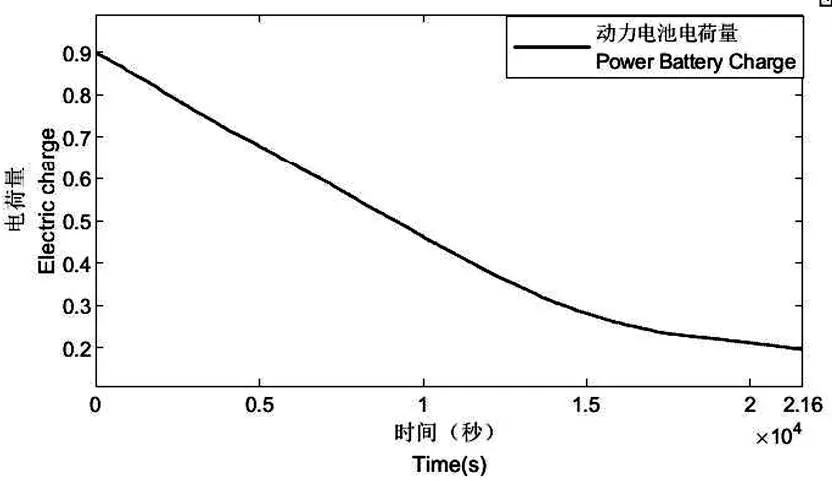
图12 动力电池电荷量变化曲线

图13 动力电池电荷量变化曲线局部放大图

图14 单一动力电池与多源动力系统动力电池输出电流值
3 结 论
(1)本文设计一种以电网电源供电为主,小容量的动力电池和小型增程器辅助供电的多源动力系统,基于Simulink搭建中/重载作业工况有无电网电源供电的系统模型。经过仿真分析得到,中载作业中无电网电源供电下,满载高速转运续航满足田间转运需求,且动力系统中动力电池质量相较于纯动力电池供电系统降低了48%,体积降低了35%;重载作业在多源动力系统供电下,可连续6h进行旋耕作业,作业相同时间,多源动力系统的动力电池质量相较于无模糊控制的多源动力系统降低了70.25%,体积降低了66.82%,相较于纯动力电池供电系统降低了86.48%,体积降低了83.1%。。对系统模型进行仿真分析证明,多源动力系统可以满足农用机械在轻中重载作业工况下的功率需求和能量需求,为小型电动农用机械发展中受到动力电池容量不足,体积大、质量大的制约提供一种解决思路;
(2)采用规则控制策略和模糊充放电控制策略对多源动力系统电源能量进行管控,满足作业动力性的前提下合理分配不同电源的输出功率,对动力电池进行了保护,并根据电网电源的富裕功率对动力电池进行补电,可以延长整车作业续航时长。
[1] 李微微.拖拉机能耗异常的常见原因与合理检修技术[J].农机使用与维修,2021(9):91-92
[2] 陈俊屹,陈其怀,林添良,等.基于分级压差控制的电动挖掘机双变动力总成控制方法研究[J].液压与气动,2021,45(5):74-83
[3] 刘孟楠,雷生辉,赵静慧,等.电动拖拉机发展历程与研究现状综述[J].农业机械学报,2022,53(S1):348-364
[4] 杨杭旭,刘冬梅,周俊,等.增程式电动拖拉机研究进展[J].中国农机化学报,2022,43(11):118-125
[5] 李银平,刘立,靳添絮,等.基于动态规划的电动拖拉机动力电源能量控制策略研究[J].农业机械学报,2020,51(4):403-410
[6] 张健,陈科任,代艳萍.面向现代农业庄园的电动车车架设计及模态分析[J].中国农机化学报,2019,40(2):109-112
[7] 吴伟斌,杨晓彬,张震邦,等.增程式山地果园电动运输车动力系统设计与试验[J].华中农业大学学报,2018,37(4):1-6
[8] Lee HS, Kim JS, Park YI,. Rule-based power distribution in the power train of a parallel hybrid tractor for fuel savings [J]. Journal of Precision Engineering and Manufacturing-Green Technology, 2016,3(3):231-237
[9] 曹宏基,刘道兵,李世春,等.计及UPFC的主动配电网日前-实时优化策略[J].智慧电力,2022,50(7):65-73
[10] 赵静慧,徐立友,刘恩泽,等.增程式电动拖拉机驱动系统设计[J].农机化研究,2018,40(11):236-240
[11] 徐立友,刘恩泽,刘孟楠,等.燃料电池/蓄电池混合动力电动拖拉机能量管理策略[J].河南科技大学学报(自然科学 版),2019,40(2):80-86,9
[12] 夏长高,孙闫,周雯雯.双电源电动拖拉机能量管理仿真研究[J].农机化研究,2019,41(1):234-240
[13] 高辉松,朱思洪,吕宝占.电动拖拉机发展及其关键技术[J].拖拉机与农用运输车,2007(6):4-7
[14] 黄天乐,陈树人,施爱平,等.双电机功率分汇流纯电动拖拉机能量管理策略[J].农机化研究,2020,42(6):246-250
[15] 汤赛金.基于出行特征的增程式电动汽车能量管理策略研究[D].北京:北京交通大学,2020
[16] 郭依剑,朱兴业,陈盛源,等.卷盘式喷灌机智能灌溉模糊控制技术研究[J].灌溉排水学报,2022,41(7):65-69,95
[17] 周凯.燃料电池城市客车动力系统设计与能量管理策略研究[D].贵阳:贵州大学,2018
[18] 权峻.太阳能温室建模及智能控制策略研究[D].天津:天津理工大学,2019
[19] 中国农业机械化科学研究院.农业机械设计手册(上)[M].北京:中国农业科学技术出版社,2007
[20] 林歆悠,黄强,张光吉.基于PSO的新型双电机多模式驱动系统转矩分配策略优化[J].汽车工程,2022,44(8):1218-1225
[21] 殷仁述,杨沿平,杨阳,等.车用钛酸锂电池生命周期评价[J].中国环境科学,2018,38(6):2371-2381
[22] 姜华强,潘垂宇,李学达,等.基于大数据的汽车动力电池状态评估综述[J].汽车文摘,2022,(11):26-35
[23] 董祥祥,武鹏,葛传九,等.基于参数在线辨识和SVD-UKF的锂电池SOC联合估计[J].控制工程,2022,29(9):1713-1721
[24] 尹力.ZS公司发电机产品国内营销策略研究[D].重庆:重庆工商大学,2021
[25] 聂友红.增程式摩托车增程控制器的设计与研究[D].重庆:西南大学,2016
[26] 吕海英.电动汽车增程器系统关键技术研究[D].天津:天津大学,2017
Design and Energy Management Simulation of Multi-source Power Parallel System of Facility Agricultural Machinery Based on Simulink
JIANG Huan-long1, LIAO Gui-ming1, LI Qing-tao1,2, CHEN Xing-hai1, LI Jia-yang1, YAN Chong-yong1
1.610039,2.610039,
In view of the problem that small pure electric facilities agricultural machinery in larger power working condition operation is limited by the specific energy of power battery, design a multi-source power system drive scheme with grid power supply as the main source and small capacity power battery and small range extender as the supplement. Combined with the actual operation requirements of facility agriculture, the energy management method combining rule control strategy and fuzzy control strategy are used, and the system models are established based on Simulink for simulation analysis. The results show that in medium-load operation, the fuzzy-controlled small-capacity power battery and small range extender can meet the range requirements, and the power battery mass in the power system is reduced by 48% and the volume is reduced by 35% compared with the pure power battery-powered system; in heavy-load operation, the power battery mass of the multi-source power system is reduced by 70.25% and the volume is reduced by 66.82% compared with the multi-source power system without fuzzy control for the same duration of operation, and the volume is reduced by 86.48% and 83.1% compared with the pure power battery-powered system. In heavy-duty operation, the power battery mass of multi-source power system is reduced by 70.25% and the volume is reduced by 66.82% compared with the multi-source power system without fuzzy control, and the volume is reduced by 86.48% and 83.1% compared with the pure power battery power system. This paper provides a solution to the problem of small purely electric agricultural machinery constrained by the large mass and size of the power battery.
Farm machinery; dynamical system; energy management
S219.4
A
1000-2324(2023)02-0308-11
10.3969/j.issn.1000-2324.2023.02.021
2022-10-23
2022-12-05
四川省科技计划项目(重点研发项目):小型多功能插电式作业车(2021YFG0064)
姜欢龙(1997-),男,硕士研究生,研究方向:农业机械动力系统设计及能量管理. E-mail:huanlong689@163.com
Author for correspondence. E-mail:liqingtao@mail.xhu.edu.cn
猜你喜欢
汽车实用技术(2022年4期)2022-03-07
湖北农机化(2020年4期)2020-07-24
汽车实用技术(2020年2期)2020-02-25
能源(2017年12期)2018-01-31
汽车文摘(2017年5期)2017-12-05
汽车文摘(2017年10期)2017-12-02
资源再生(2017年4期)2017-06-15
新农业(2016年21期)2016-08-16
水利科技与经济(2016年3期)2016-04-22
电源技术(2016年9期)2016-02-27