
基于LabVIEW的智能车检测系统的设计
2023-05-22 06:33莫天豪徐锦成
物联网技术 2023年5期
莫天豪,张 丹,徐锦成,王 程,靳 永
(南京理工大学紫金学院,江苏 南京 210046)
0 引言
有刷电机[1]的应用非常广泛,但由于电机结构复杂,存在故障多、寿命短、易产生电磁干扰等问题。在正常测试中,车模上的直流小型有刷电机因为电机内部过热,经常会产生故障。在智能车竞赛中[2],车模跑完几圈赛道后,经常会冲出赛道,没有按照预定轨迹行驶。经排查得出,比赛场所室内温度过高加上长时间高速运行导致车体磨损,使车模电机出现了问题。电机频繁地出问题常常会导致参赛者耗费大量的时间在车体检查上。为提高排查问题的效率,设计基于LabVIEW 的智能车检测系统,可快速地检测出车体是否可以正常运行。
1 检测系统总体设计
检测系统是以比赛车模作为研究对象,系统总体分为硬件数据采集平台和软件开发操作界面。图1 为系统构成的总体框图。

图1 系统构成总体框图
检测系统运行的过程是在智能车电源供电后,额定电流通过主要的控制芯片使电机按照设定程序正常工作,同时通过加速度传感器拾取电机上产生的振动信号并转化成电信号,然后通过信号转换器把电信号转化为模拟信号,再利用PXI 数据采集卡接收模拟信号。在电脑端上位机采用LabVIEW 虚拟仪器软件开发设计信号处理程序,对接收到的模拟信号进行预处理得到波形图结果。最后,根据结果可以分析出智能车的运转状态。
2 硬件选择与设计
2.1 加速度传感器
传感器是一种检测装置,它能感受到被测量的信息,并可将感受到的信息按一定规律变换成为电信号或其他所需形式的信息输出,以满足信息的传输、处理、存储、显示、记录和控制等要求[3]。
根据检测系统中的精确测量要求,选用了压电式加速度传感器。传感器根据内部的压电瓷器或石英结晶的特性,产生压电效应。传感器振动时,质量块加到压电器件上的压力会发生变化。当被测振动频率远远小于加速度传感器的固定频率时,改变的受力值会与要测得的加速度成正比[4]。根据受力值的变化,系统内部可得出被测物体的加速度。
2.2 PXI 总线及测试系统
PXI 总线(PCI eXtensions for Instrumentation)是PCI 总线的扩展,是NI 公司在1997年推出的一种全新的仪器总线规范。PXI 总线被广泛应用于大数据收集、工业过程自动化以及企业项目、科研等领域。由于PXI 总线具有比较牢固的机械结构、较优异的兼容性以及较高的安全性,所以本文选用PXI 总线进行检测和采集数据[5]。
要组建一个PXI 的总线测试系统,需要根据测试需要的测试类型、测试环境、测试要求等选择相应的数据采集卡、PXIe-PCIe 转换卡、接线盒和机箱[6]。根据系统设计要求,选择采用与NI 公司的LabVIEW 软件相配套的数据采集卡及相关模块以保证数据稳定精确。在本设计中组建的PXI 总线数据采集平台,选取了NI 公司的PXIe—6356 和PXIe8361数据采集卡。搭建平台需要先将PXIe—6356 采集卡安装到NI PXIe-1073 机箱里的插槽,将PXIe8361 采集卡安装到电脑端主机的插槽中,再用数据屏蔽电缆线将机箱的插口与电脑端对应的插口连接,确保电脑端的NI MAX 中设备实现连通后,就组建好了PXI 总线的数据采集平台。
3 程序设计及实测结果分析
LabVIEW 是一款由NI 公司所设计研发的图形化程序设计软件,通常在测试系统中作为上位机的开发软件[7]。LabVIEW 的应用程序包含前面板与程序框图。前面板的界面设计大多由控件和指示器构成[8]。在程序框图的任务模块设计中,将事先编译好的功能程序以图形块的模式呈现,使得项目程序可读性强。软件内有很多与NI 公司测试器件相配套的程序例程,增强了项目的可操作性。
在本检测系统中需要采集处理的信号为振动信号,系统采集好振动信号后,电脑端程序对要检测的信号进行FFT(Fast Fourier Transform)数字信号处理[9]。快速傅里叶变换(FFT)定义为:
式中:X为输入序列;N为X中元素的数量;Y为变换后结果。Y的频率分辨率(频率间隔)为:
式中,fs为采样频率。
在设定好采样频率和采样点数后,前面板中会呈现采集到电机的振动信号波形以及经过快速傅里叶变换预处理后的频域波形,在系统中经过拟合可得到物体的加速度,由式(3)可得出被测速度[10]。
振动信号的前面板正常测试及速度频域分析程序框图如图2、图3所示。

图2 振动信号频域分析前面板

图3 速度频域分析程序
在试验中,对车模进行测试,其实物如图4所示。图中车模的前轮设定为1 号轮和2 号轮,后轮设定为3 号轮和4号轮,驱动电机也对应着相应的编号。

图4 车模实物
在对被测车模准备工作完成后,通过加速度传感器接收其电机振动信号,传输到电脑端后,对被测车模的速度采集程序框图如图5所示。
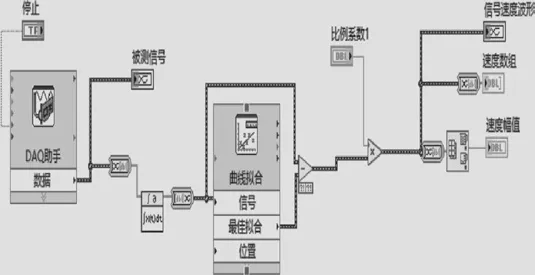
图5 被测速度的采集程序
在车模运行过程中,车模车体向预定路线右侧偏转。确认其他测试条件无误后,采用检测系统进行检测,得到车模四个车轮的振动速度时域图和振动速度频域图,如图6所示。对比四张波形图,可以发现车模1 号轮、2 号轮、3 号轮的时域图与频域图相差不大;而在4 号轮振动速度频域图中,电机频率在20 Hz 和50 Hz 之间。根据图2所示,电机正常工作频率为50 Hz 左右。

图6 车模四个车轮的振动速度时域和频域
针对3 号、4 号轮的不同状况,比对了3 号轮与4 号轮被测信号的波形图,发现4 号轮信号的幅值远小于3 号轮信号的幅值。试验结果说明,4 号电机频率确实有所下降,其性能降低。试验检测结果如图7、图8所示。
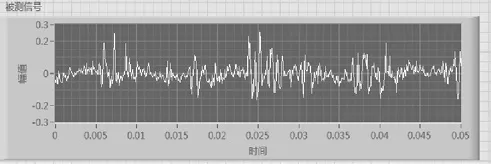
图7 3 号轮被测振动信号

图8 4 号轮被测振动信号
经上述测试结果分析,4 号轮电机存在问题。在车模行驶中,右后轮的转速远小于左后轮的转速,所以车模向右偏转,符合实际结果,对实物进行多次测试后证明了本系统的准确性与方案的可行性。
4 结语
本文中采用PXI 总线和传感器模块搭建硬件采集平台,用于智能车检测系统采集数据;采用LabVIEW 设计软件来处理和分析测试结果。此系统能迅速准确地得出智能车在不同车速时电机的运行结果,且维护便捷,具有较高的性价比。经过多次试验与分析发现,系统运行状态理想。
猜你喜欢
舰船科学技术(2022年22期)2022-12-13
玩具世界(2020年6期)2020-12-06
测控技术(2018年6期)2018-11-25
测控技术(2018年8期)2018-11-25
雷达学报(2018年3期)2018-07-18
经营者·汽车商业评论(2016年5期)2017-11-30
火控雷达技术(2016年1期)2016-02-06
电测与仪表(2015年3期)2015-04-09
电子设计工程(2015年8期)2015-02-27
河南科技(2014年16期)2014-02-27
