基于MFAPC的智能车辆跟随式自动驾驶纵向加速度控制算法
2023-05-22 03:56谭宇航
汽车实用技术 2023年9期
谭宇航
(长安大学 工程机械学院,陕西 西安 710064)
车辆纵向动力学控制是智能汽车控制的基础。其目的是根据驾驶条件进行加速与减速,从而减少驾驶员的操作量。纵向跟随式控制系统通常根据前方车辆和被控车辆之间的相对速度和相对位置等信息来确定被控车辆的期望加速度,以便于和前方车辆保持适当的距离,并通过控制车辆的油门和制动器跟踪期望加速度。
针对车辆纵向跟随式控制,国内外许多学者已经进行了大量的研究,文献[1]利用比例积分(Proportion Integration, PI)与前馈控制,提出了一种用于车辆停走巡航控制的车速和车距控制算法;文献[2]提出了一种无模型巡航控制算法(Model Free Cruise Control, MFCC),该算法根据参考模型参数直接确定油门与制动器的输入;文献[3]基于迭代学习方法设计了车辆驱动和制动控制算法;文献[4]根据对驾驶员的行为分析,提出了一种车辆纵向加速度跟随控制的校正策略,符合真实驾驶员的操作行为;文献[5]使用车间反应时距描述自车对目标车辆做出的反应,分别设计了基于线性二次型调节器和模型预测控制器的上位控制器,仿真结果表明,线性二次型调节器(Linear Quadratic Regulator, LQR)与模型预测控制(Model Predictive Control, MPC)控制器均能有效处理复杂交通环境信息;文献[6]基于前馈控制与模糊逻辑对节气门开度和制动压力进行控制,在各种工况下保持了良好的性能;文献[7]提出了一种基于非线性干扰观测器的无人驾驶车辆模糊滑模车速控制方法,为减少控制抖振,滑模控制的增益系数由模糊逻辑进行在线调节,结果表明,该方法可以精确地估计和补偿模型的不确定性和外部干扰。
由于车辆在行驶过程中环境多变,具有非线性、存在外界干扰等特点,因此,设计一种鲁棒性强、稳定性好的车辆纵向动力学控制器是很有必要的。无模型自适应控制(Model-Free Adaptive Control, MFAC)是一种基于非线性系统的控制方法,该方法基于被控对象的输入和输出数据,无需依赖系统的数学模型,即可实现参数和结构的非线性自适应控制[8]。MFAC计算量小,易于实现,且适用于复杂的非线性系统,与传统的比例-积分-微分(Proportion Integration Differentiation, PID)等方法相比,具有更强的鲁棒性与抗干扰能力。目前,MFAC控制已被广泛研究并实现在许多实际应用中,如车辆控制[9-11]、阴极开放式质子交换膜燃料电池(Proton Exchange Membrane Fuel Cell,PEMFC)系统控制[12]、湿式离合器压力控制[13]、电机控制[14]、城市交通网络控制[15]等。
预测控制是一种广泛应用的控制方法,可以结合当前时刻的测量值和预测值,来预测未来时刻内的系统输出值。本文针对车辆纵向动力学系统的特点,结合预测控制与无模型自适应控制算法各自的优点,采用了基于无模型自适应预测控制(Model-Free Adaptive Predictive Control, MFAPC)的车辆纵向动力学控制方法,该方法仅利用车辆纵向行驶过程中的在线输入/输出数据,通过建立每个点处的紧格式动态线性化数据模型,达到设计控制器的目的。
为了验证MFAPC控制方法的有效性,本文基于车辆跟随式自动驾驶场景,设计了分层式的纵向跟随控制器,其中上层控制器为线性二次型最优控制器,根据前后两车的车速误差与车间距误差得到车辆的期望加速度;下层控制器分别是前馈控制器与基于无模型自适应预测控制的控制器,通过控制车辆的节气门开度或制动压力,跟随上层控制器得出的期望加速度。最后,在MATLAB/Simulink与CarSim平台进行联合仿真,并与PID算法进行比较,对所设计的控制算法的优越性进行了验证。
1 模型建立
1.1 车辆纵向动力学模型
车辆纵向动力学存在很多非线性的因素影响,例如发动机非线性、空气阻力、轮胎非线性等,考虑到车辆纵向跟随场景的应用环境,基于以下假设与简化的条件,建立车辆纵向动力学模型:
1)忽略车辆纵向与横向耦合;
2)发动机动态特性近似为一阶惯性环节;
3)轮胎与地面之间的相对滑移可以忽略不计;
4)自动变速器的换挡逻辑为节气门开度和车速的非线性函数;
5)制动压力与制动力矩为固定增益关系,其动态特性由一阶惯性延迟环节描述。
车辆所受力包含四个部分:驱动/制动力F,空气阻力Fw,滚动阻力Ff和坡道阻力Fg。因此,车辆纵向动力学方程可表示为
1.2 车辆跟随式自动驾驶模型
本文所应用的车辆跟随式自动驾驶模型如图2所示,前车为有人驾驶的领航车,并安装部分检测车辆状态的传感器采集速度等信号,通过车间通信的方式将信息传输给后车。后车接受到信息且与领航车保持一定的安全距离以及相同的速度,达到跟随行驶的目的。

图1 车辆纵向跟随示意图
2 控制器总体架构
本文设计的车辆跟随式自动驾驶纵向控制系统框架如图2所示,主要由上位控制器和下位控制器两部分组成。其中上位控制器根据车间状态,综合考虑车间距误差Δd、相对速度Δv与加速度af,通过线性二次最优控制理论得到后车期望的跟车加速度ades;下位控制器首先使用切换逻辑来判断车辆处于驱动或制动状态,然后将前馈控制与MFAPC相结合,共同控制车辆的驱动和制动系统。前馈控制通过上位控制器得到的期望加速度给出控制量,可以提高控制系统的响应速度,降低控制延迟;无模型自适应预测控制在考虑到车辆纵向动力学模型参数时变、发动机非线性、执行器延迟等特点,外加前馈控制环节可能面临失配问题等不确定因素的情况下,利用系统的I/O数据,使车辆的实际加速度能快速、精确地跟踪上层控制器给出的期望加速度。

图2 控制器整体架构
2.1 上位控制器设计
图1显示了前车与后车的纵向运动学关系,现定义为
式中,Δd为车间距误差;d为前后两车的车间距;ddes为期望车间距;Δv为前后车相对速度;vf为前车速度;vr为后车速度。
后车跟随行驶期望车间距采用固定车间时距:
式中,th为设定的车间安全时距;d0为后车停车后与前车最小安全距离,为一常数。
通常可以使用一阶延迟环节来表示后车实际加速度a与期望加速度ades之间的关系为
式中,K为系统增益;τ为时间常数。
根据上述分析,车间纵向运动学模型可以用如下状态空间方程表示为
式中,
稳态跟车工况时,上位控制器以同时减少期望车间距误差Δd与前后车相对速度Δv为控制目标,以此设计线性二次型优化性能指标函数:
式中,矩阵Q为状态量权重系数,Q=diag[q1,q2,q3];q1,q2和q3分别为车间距误差、相对速度和后车加速度的加权系数,本文取值分别为q1=1,q2=1,q3=1;R为控制量的权重系数,本文取值R=10。
2.2 节气门/制动器切换逻辑
车辆的驱动机构与制动机构属于两套不同的系统,二者不能同时工作,因此,根据车辆行驶状况的不同,加速度跟随控制需要在节气门与制动器两套机构之间进行切换[3]。
根据式(1)可知,车辆在行驶时会受到滚动阻力Ff与空气阻力Fw等外部阻力,因此,通常以车辆怠速滑行数据为基础,记录不同车速下的减速度,得滑行减速度,以此作为驱动/制动切换的基准a0,并且为了提高舒适性的要求与部件可靠性,将基准偏置一定值h。
2.3 驱动/制动系统前馈控制
2.3.1 驱动系统前馈控制
当车辆处于驱动工况时,制动力矩为零,由式(1)及上位控制器计算出的期望加速度可以得到此时车辆的期望驱动力矩的表达式为
发动机的期望转矩可以表示为
式中,Te,des为发动机的期望转矩;ig为变速器的传动比;i0为主减速器的传动比;ηt为传动系的机械效率;r为车轮等效半径。
发动机稳态输出扭矩与发动机转速以及节气门开度存在对应关系,因此,利用式(8)得到的发动机期望转矩Te,des和当前的发动机转速ne逆向得到期望的前馈节气门开度α1,可表示为
式中,Eng(*)为发动机的稳态扭矩特性函数。
2.3.2 制动系统前馈控制
当车辆处于制动工况时,驱动力矩Twp为零,此时的期望制动压力表达式为
式中,p1,des为期望制动压力;Twb,des为期望制动力矩;Kb为制动增益系数。
2.4 无模型自适应预测控制(MFAPC)
本文基于如图3所示的紧格式动态线性化的MFAPC,分别设计了车辆驱动系统与制动系统控制算法,使车辆的实际加速度能够快速、准确地跟踪期望加速度。
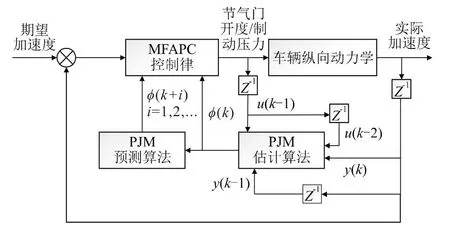
图3 纵向动力学无模型自适应预测控制结构框图
2.4.1 离散时间非线性系统动态线性化
首先,建立如下非线性输入-输出函数描述车辆的驱动/制动动力学系统:
式中,y(k)∈R,u(k)∈R分别为系统在k时刻的输出与输入,对应车辆的加速度和节气门开度/制动压力;nu∈Z,ny∈Z为两个未知的正整数;f(*)为一个非线性函数。
控制器的设计需首先满足以下两个假设:
假设1:非线性函数f(*)关于控制输入u(k)存在连续的偏导数;
假设 2:系统满足广义 Lipschitz条件,即对任意2个不同k1、k2均满足:
式中,y(ki+1)=f(y(ki),y(ki-1),…,u(ki),u(ki-1),…,u(kinu));i=1,2;b是一个正常数。
对于式(11)描述的系统,满足假设 1和假设 2时,则必然存在一个时变参数ϕc(k)∈R,当Δu(k)=u(k)-u(k-1)≠0时,非线性系统可线性化为紧格式动态线性化(Compact Form Dynamic Linearization, CFDL)数据模型,可表示为
式中,ϕc(k)∈R称为系统的伪偏导数(Pseudo Partial Derivative, PPD);Δy(k+1)为k+1时刻车辆的加速度变化量;Δu(k)为k时刻节气门开度或制动压力控制输入变化量。
基于上述增量形式的驱动/制动动力学系统的数据模型,可得出系统在k+1时刻的向前一步预测输出方程,即
同理,N步向前预测输出方程可以表示为
式中,
式中,YN(k+1)为系统输出的N步向前预报向量;ΔUNu(k+1)为控制输入增量向量;Nu为控制时域常数。
2.4.2 驱动/制动MFAPC算法设计
本小节将设计MFAPC算法,对输出误差与控制增量加权的准则函数为
式中,YN*(k+1)=[y*(k+1),…,y*(k+N)]T;λ为加权系数。
令∂J⁄∂ΔUNu(k)=0,控制增量表达式为
因此,当前时刻的控制输入为
式中,g=[1,0,…,0]T。
2.4.3 伪偏导数的估计与预测
矩阵A(k)是由伪偏导数ϕc(k),ϕc(k+1),…,ϕc(k+Nu-1)等组成的,因此,控制输入的求解需要对伪偏导数进行参数估计,将伪偏导数估计的性能函数定义为
式中,μ>0为权重因子。对式(22)求关于ϕc(k)的偏导,并令其为零,可得PPD的估计算法:
式中,η∈(0,1]为步长因子。
为了使伪偏导数估计更好地跟踪过程的时变动态,引入如下重置机制:
式(21)、式(22)给出了伪偏导数ϕc(k)的估计算法,而式(17)中,A(k)所包含的 PPD参数还有ϕc(k+1),...,ϕc(k+Nu-1),这些未知元素可以通过k时刻已估计或已知的序列进行预测得到。本文采用自回归模型对k+1时刻后的伪偏导数进行预测,预测方法的公式为
式中,j=1,2,…,Nu-1;θ1(k),θ2(k),…,θnp(k)为系数;np为一个适当的阶数,本文中取np=3。
令Θ(k)=[θ1(k),θ2(k),…,θnp(k)]T,其公式为
3 仿真验证
为了验证本文设计的控制算法,在 CarSim-Simulink环境中搭建车辆纵向跟随系统仿真模型。在CarSim中建立的车辆模型参数如表1所示。
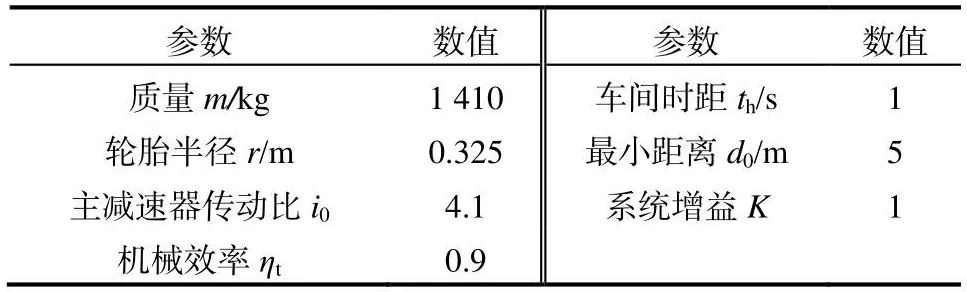
表1 车辆参数
3.1 下位控制器验证
本小节对所设计的下位控制器算法进行验证,并将结果与应用较为广泛的 PID算法进行对比。
对于无模型自适应预测控制算法,伪偏导数的初值设定为ϕc(1)=1.4,重置值为 1.4,δ=1,η=1,μ=0.01,ε=10-5,预测时域N=4,控制时域Nu=3,对于驱动系统,权重因子λ1取值为2 000;对于制动系统,权重因子λ2取值为800;PID算法中的参数Kp=1.5,Ki=5,Kd=0。
设置了梯形信号作为期望加速度,车辆的初速度为80 km/h,仿真时间分别为30 s,并在车辆输出的加速度上加入随机噪声干扰。
两种控制算法的仿真结果如图4所示。由图4可知,前馈-MFAPC算法的调节时间更小,并且具有更快的响应速度。图5显示了加速度误差的响应曲线,前馈-MFAPC控制不仅具有更快的响应速度,且具有更小的跟踪误差。

图4 加速度跟踪仿真对比
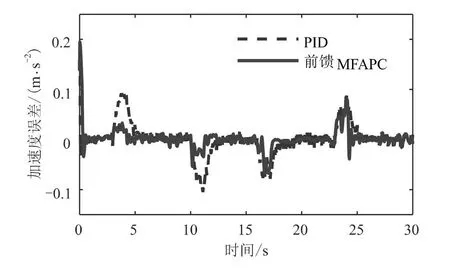
图5 加速度跟踪误差仿真对比
另一方面,图6给出了两种控制算法在跟踪期望加速度信号时的节气门开度与制动压力。当期望加速度降低到一定值时,前馈-MFAPC算法和 PID算法均能从驱动控制切换到制动控制,且过度平稳,表明 2.2节设计的驱动/制动切换逻辑有效。

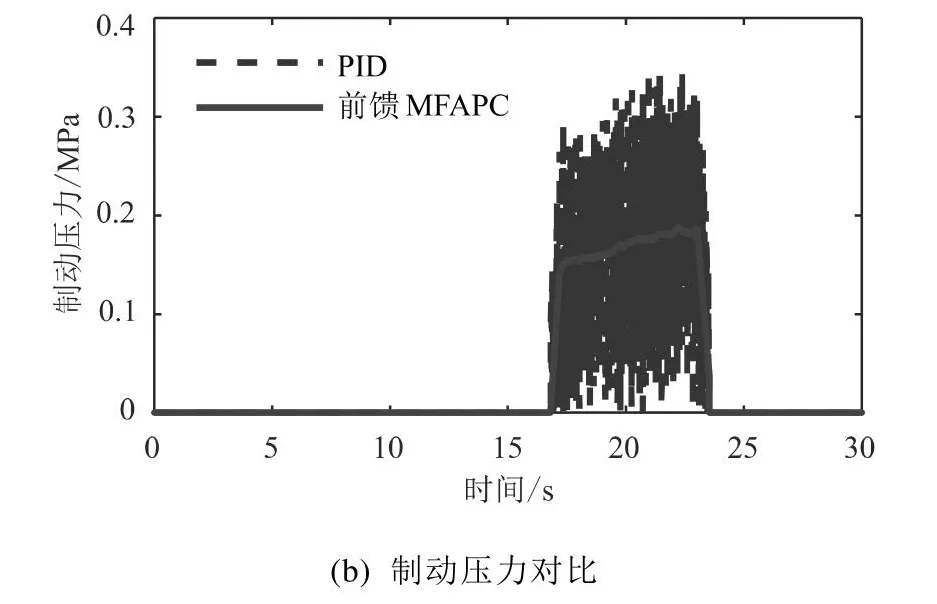
图6 梯形信号控制输入仿真对比
从仿真结果可以看出,由于外部随机干扰的存在,PID算法的节气门开度和制动压力都出现了十分剧烈的震荡,实车中这将减少执行机构的寿命,甚至导致执行机构失效,前馈-MFAPC算法的节气门开度和制动压力变化平稳,并且未出现震荡现象,符合实际中的操作表现,表明存在外界干扰的情况下,前馈-MFAPC控制算法对车辆的控制过程更加稳定,且对干扰具有更好的鲁棒性。
3.2 上下层协同控制验证
为了验证本文所设计的前馈-MFAPC控制方法在纵向跟随工况下的控制效果,本小节利用提出的分层控制策略,对所设计的上层控制器与下层控制器进行协同仿真。
设定前车初始速度为72 km/h,0~5 s匀速运动,第5 s开始加速,到15 s时加速至100 km/h,15~25 s匀速运动,25~35 s减速至60 km/h,前后两车的初始车间距误差和速度误差均为0,仿真结果如图7—图9所示。
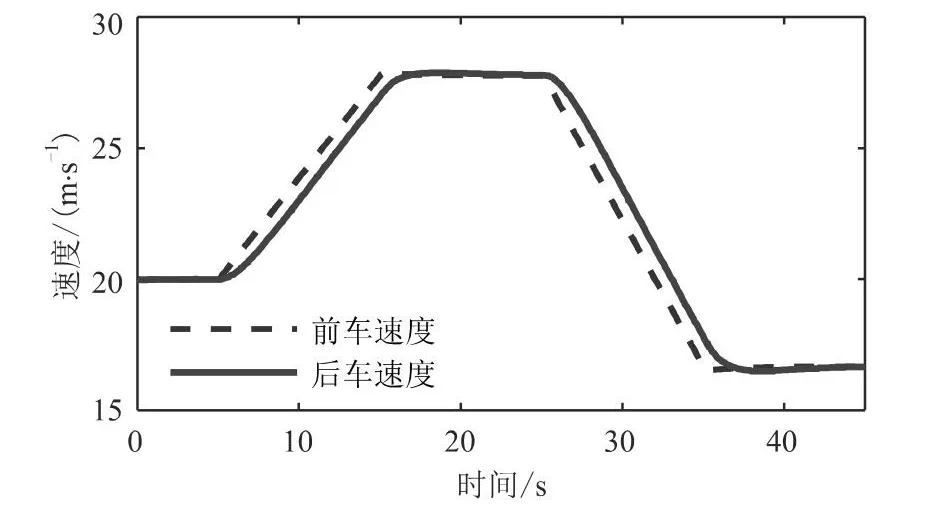
图7 车速跟踪仿真结果

图8 车间距跟踪仿真结果

图9 期望加速度跟踪仿真结果
由图7、图8可知,后车可以始终保持对前车跟随行驶的状态,速度误差与间距误差维持在较小的范围之内,证明了分层控制策略的有效性。
图9为后车对期望加速度跟踪的仿真结果,可以看出,当前车加速度发生突变时,后车的期望加速度变化平稳,并且后车的实际加速度可以精确而迅速地跟随期望加速度,证明了下位控制器控制效果良好。
4 结论
本文提出了一种分层纵向跟随式自动驾驶的控制方法,通过在 MATLAB/Simulink与 CarSim平台的联合仿真,得到结论如下:
1)基于线性最优二次型的上位控制器所得到的期望加速度变化平稳,满足了纵向跟随场景的安全性与舒适性。
2)提出了前馈控制与无模型自适应预测控制相结合的控制方法,该方法不仅响应迅速,并且当存在外界随机干扰时,仍可以保持较好的跟踪精度。
3)在不同信号的激励下,本文算法控制下的车辆执行机构变化平稳,没有出现剧烈的波动,而 PID算法控制下的车辆执行机构出现了剧烈的震荡现象,说明PID算法对外界随机干扰的鲁棒性较差,而基于前馈-MFAPC的控制方法对外界随机干扰有着良好的鲁棒性。
猜你喜欢
智能制造(2021年4期)2021-11-04
汽车维护与修理(2019年3期)2019-08-08
小学生学习指导(中年级)(2018年11期)2018-11-29
汽车维护与修理(2018年19期)2018-04-28
农村农业农民·B版(2018年11期)2018-01-28
制造技术与机床(2017年6期)2018-01-19
中国老区建设(2016年12期)2017-01-15
电源技术(2015年9期)2015-06-05
汽车维修与保养(2015年1期)2015-04-17
汽车零部件(2014年5期)2014-11-11