新能源商用车平顺性计算平台开发
2023-05-22 03:56尹华清梁荣朝高立军李金海
汽车实用技术 2023年9期
尹华清,梁荣朝,高立军,李金海
(浙江远程商用车研发有限公司,浙江 杭州 311228)
随着能源问题和环境问题的日益突出,现有传统柴油动力商用车已经不能适应未来社会发展的需要,新能源商用车必将迎来长足的发展[1]。由于新能源商用车的新动力源或动力电池组、电机电控系统、传动系等大质量组件代替原来的动力系统和传动系,导致整车载荷分布有多种差别较大的方案。载荷分布影响平顺性指标,关系着货物安全和乘员舒适性及驾乘人员的身心健康。
车辆平顺性开发主要方法如下:1)物理车试验,但试验受到车辆、环境和设备等资源影响,成本高、周期长;2)虚拟样机仿真,其缺点是需要大量精确的特性参数,在开发初期无法满足多方案大量参数条件;3)经验公式设计计算,缺点是自由度数过少,虽然求解方便,但模型误差大。
鉴于目前平顺性开发局限性,尤其是概念阶段无法满足新能源商用车多方案快速分析需求。本文通过对双轴车辆平顺性数学模型的推导,确定采用七自由度整车模型,全面地考虑四轮胎垂向、车身垂向、俯仰和侧倾的振动。开发便捷的界面化计算工具,根据少量的特性数据、修正系数、试验条件等参数,在总布置阶段快速完成平顺性计算、报告编写等平顺性开发工作。本文阐述的方法计算精度满足工程要求,所需参数条件容易满足,可缩短设计周期,降低研发成本。
1 车辆平顺性理论计算
1.1 七自由度模型的建立
本文采用七自由度模型作为车辆模型。该模型包括以下七个自由度:簧载质量(车身)的俯仰运动、侧倾运动、质心处的垂向运动、四个车轮的垂向运动[2]。
七自由度模型示意图如图1所示。其中,m为簧载质量,m1,m2,m3,m4为非簧载质量,c1,c2,c3,c4为悬架阻尼,k1,k2,k3,k4为悬架刚度,k5,k6,k7,k8为轮胎刚度,z1,z2,z3,z4为非簧载质量位移,z5,z6,z7,z8为悬架与车架(车身)连接处位移,z01,z02,z03,z04为车轮的路面位移输入,F11,F12,F13,F14为悬架位置处车架的受力,Jx,Jy分别为簧载质量侧倾与俯仰转动惯量,a和b分别为质心至前轴和后轴的距离,hf和hr分别为前轮和后轮轮距的一半。θ为车辆俯仰角,φ为车辆侧倾角,Zb为车辆质心垂向位移。

图1 七自由度模型示意图
簧载质量(车身)的俯仰运动、侧倾运动、质心处垂向运动、四个车轮垂向运动的微分方程如下所示:
根据后续的计算需求将以上各式整理转化成状态空间模型和微分方程模型。
1.2 路面激励的建立
1.2.1 路面随机激励的建立
大量试验测量表明,路面不平度可看作是平稳的、各态历经的零均值的高斯随机过程[3]。设右前轮的频谱为Q1(f),则其余车轮频谱为
对以上各式分别进行傅里叶反变换,可得与其对应的各轮的路面随机激励的时域表示。式中,coh(f)为汽车左、右轮两个轮迹的相干函数;其拟合表达式为
τ为后轮相对于前轮的时间延迟,表达式为
式中,u为车速。
1.2.2 路面脉冲激励的建立
根据车辆基本参数、车速及凸块的几何尺寸推导可得前轮路面脉冲激励的时间域描述为[4]
式中,h为凸块的高度;Ltri为凸块的长度;t0为车辆行驶至凸块的时间;t1为车辆行驶凸块一半的时间。根据后轮相对于前轮的时间延迟τ可得后轮路面脉冲激励的时域描述。
1.3 车辆平顺性性能评价指标的计算
1.3.1 各悬架及驾驶员位置处垂向加速度
各悬架位置处及驾驶员位置处的垂向加速度的表达式分别为
式中,d1、d2分别为驾驶员位置处至前轴的距离和至车辆纵向中心面的距离。
1.3.2 各悬架及驾驶员位置处频响函数
车辆振动系统的频率响应函数为
式中,M为系统质量矩阵;C为系统阻尼矩阵;K为系统刚度矩阵;P为轮胎刚度矩阵;ω为车身振动圆频率,ω=2πf。
矩阵H(ω)是一个7行4列的复数矩阵,其中第i行第j列元素Hij表示第j个车轮处路面输入到车辆系统第i个自由度的频率响应函数。
各轮输入下的右前、左前、左后、右后悬架位置处及驾驶员位置处的频响函数分别为
式中,i=1,2,3,4,分别为右前轮,左前轮,左后轮,右后轮。
右前、左前、左后、右后悬架位置处及驾驶员位置处的频响函数分别为
式中,j=rf,lf,lr,rr,d,分别为右前、左前、左后、右后悬架位置处及驾驶员位置处。下文同。
1.3.3 各悬架及驾驶员位置处功率谱密度
各悬架位置处及驾驶员位置处的加速度功率谱密度为
式中,Gq为路面对四轮输入的时间频率功率谱矩阵[5]。
1.3.4 各悬架及驾驶员位置处垂向加速度均方根值
各悬架位置处及驾驶员位置处的垂向加速度的加速度均方根值为
式中,W(f)为频率加权函数。
1.3.5 加权振级的计算
式中,a0为参考的加速度均方根值,取a0=10-6m.s-2。
2 车辆平顺性设计计算
鉴于目前平顺性计算参数需求多、计算复杂问题,采用软件编程完成设计计算。本节应用MATLAB/GUI、界面化输入设计参数、基于整车七自由度数学模型、根据GB/T 4970—2009[6],开发车辆平顺性界面计算平台,为设计工作提供工具。
2.1 计算平台开发
计算平台开发包括界面设计和设计计算功能主程序实现。具体的内容有:1)对界面要实现的主要功能进行分析,确定计算平台的设计输入输出;2)从保证界面简洁清晰的角度出发,确定界面布置,编制界面;3)根据界面实现的功能,编写平顺性计算分析、绘图、编word报告的程序。计算平台的界面如图2所示,界面下方为功能按键区。

图2 计算平台界面
2.2 计算平台功能实现
计算平台的基本功能如下:1)性能计算,计算簧载质量的俯仰、侧倾、质心位置处,各悬架位置处,驾驶员位置处垂向加速度;各自由度、各悬架位置处、驾驶员位置处的频响函数、幅频特性、功率谱密度;各悬架位置处、驾驶员位置处的垂向加速度的加速度均方根值、加权振级等性能指标结果;2)图形绘制,绘制性能曲线图;3)计算报告输出,以 word报告格式输出计算结果。
2.3 计算平台运行流程
计算流程:1)在用户界面输入参数,簧载质量、非簧载质量、悬架刚度和阻尼、轮胎等整车信息,选择路面激励、车速等试验条件;2)点击【性能计算】按钮开始运算,输出加速度均方根值及加权振级等性能指标;3)选择需要评价的性能曲线,点击【绘制图形】按钮输出俯仰角加速度曲线等曲线图形;4)设计方案定型后,点击【计算报告】输出按钮输出word版计算报告。设计人员据此对结果进行分析,若未满足设计要求,则对初始参数进行修正,从而达到了优化设计的目的。计算界面程序运行流程如图3所示。

图3 计算界面运行流程图
3 工程实例
基于上述数学模型理论,应用计算平台工具,开发某型纯电动轻卡平顺性,并进一步验证计算平台的有效性。
3.1 初始设计计算
参考市场和项目目标输入,根据竞品车数据库和性能目标,初步确定该轻卡的整车参数如表1所示。

表1 整车参数
座椅中心位置位于前轴前方(x的负方向)82.5 mm,y的正方向445 mm(左舵车)。
开展路面随机输入和路面脉冲输入平顺性计算,路面随机输入条件为匀速行驶工况,车速间隔10 km/h,从30 km/h递增至80 km/h;脉冲输入条件亦为匀速行驶工况,车速间隔10 km/h,从10 km/h递增至60 km/h。
输入上述相关参数,应用双轴车辆计算平台对该轻卡的平顺性评价指标进行计算。文中数据分析对象仅针对路面随机输入下的左前悬架位置处车架的加速度均方根值和路面脉冲输入下的驾驶员位置处车架的垂向加速度最大值进行计算以示例。
设计计算结果如表2、表3所示。
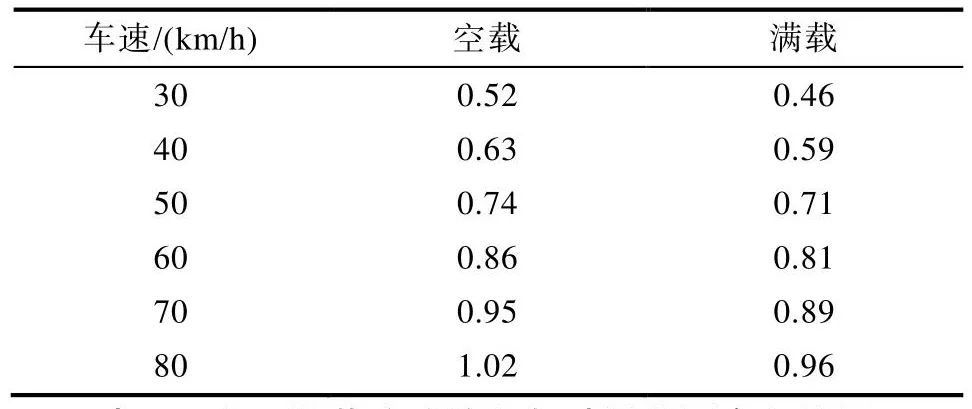
表2 空、满载随机输入左前悬架位置结果加速度均方根值单位:m/s2
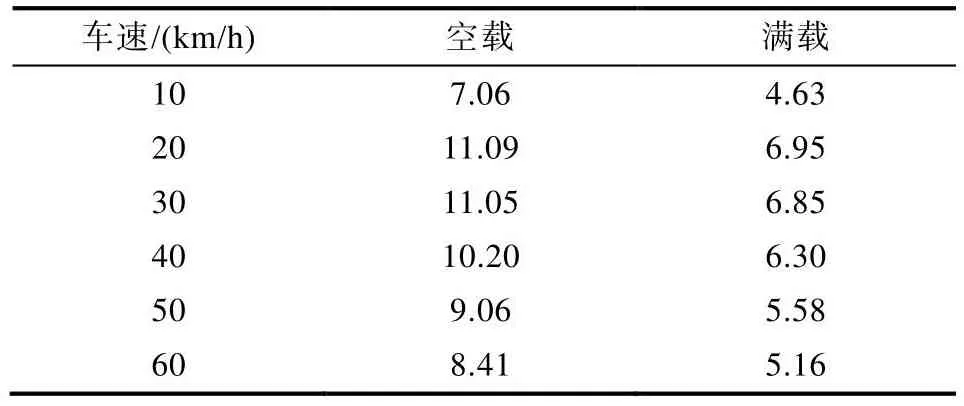
表3 空、满载脉冲输入驾驶员位置车架结果加速度均方根值单位:m/s2
3.2 优化设计计算
分析平台计算结果,车辆平顺性未满足性能目标,需要优化。应用平台多次设计计算后,获得满足性能目标的平顺性指标,从而确定试制车辆的整车参数。优化参数为刚度和阻尼,优化后,前刚度160 N/mm、160 N/mm,前阻尼4 500 N·s/m、4 500 N·s/m,后刚度187.7 N/mm、525 N/mm,后阻尼 14 100 N·s/m、14 100 N·s/m。
3.3 优化设计计算与试验结果
试制该轻卡并进行实车试验,试验工况与前述的仿真工况相同。
路面随机输入下的计算与试验结果如表4所示,随着车速的增加,左前悬架位置处车架的加速度均方根值增大;在相同车速下,空载的加速度均方根值大于满载的加速度均方根值,计算与试验结果变化趋势一致且数值吻合。

表4 空、满载左前悬架位置随机计算与试验结果加速度均方根值单位:m/s2
以车速40 km/h为例,空载、满载随机输入下左前悬架位置处车架垂向加速度计算结果如图4、图5所示。理论计算输入板簧刚度,实车是悬架刚度起作用,因零部件尺寸误差(尤其车架精度),吊耳与板簧、与支架存在干涉,产生板簧运动摩擦力,悬架受力相对于板簧受力更大,导致悬架刚度略大于板簧刚度,故试验结果相较于设计计算结果偏大。

图4 空载路面随机输入下的左前悬架位置处车架垂向加速度
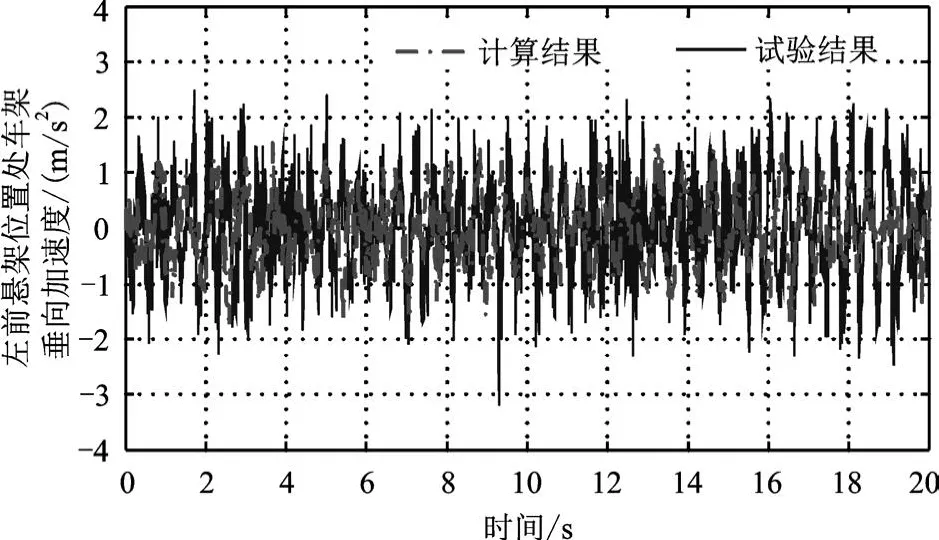
图5 满载路面随机输入下的左前悬架位置处车架垂向加速度
路面脉冲输入下的设计计算与试验结果如表5、表6所示。由表5、表6可以得出,随着车速的增加,驾驶员位置处车架的垂向加速度的最大值先增大,随后逐渐减小;在相同车速下,空载工况下的垂向加速度最大值均大于满载工况下的垂向加速度最大值。通过对比可知,计算结果与试验结果变化趋势一致且基本吻合。

表5 空、满载脉冲输入驾驶员位置车架计算与试验结果加速度均方根值单位:m/s2
以车速40 km/h为例,空载、满载脉冲输入下驾驶员位置处车架垂向加速度计算结果如图6、图7所示。路面脉冲输入工况主要关注车辆经过凸块时的响应,进行设计计算时未考虑车辆经过凸块前后的路面随机输入,故曲线有所差异。
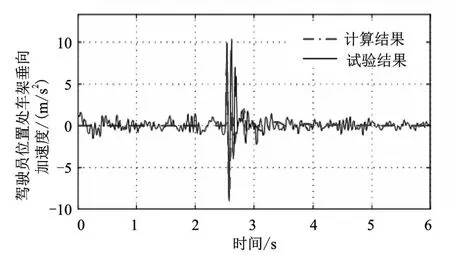
图6 空载路面脉冲输入下驾驶员位置处车架垂向加速度
综上所述,本文所开发的计算平台是可行的,可为设计人员提供车辆平顺性开发的理论依据。
4 结论
对比实车试验结果与设计计算结果,两者基本吻合,表明该计算平台的计算结果能够较为全面和准确地反映车辆的振动情况,验证了所开发的双轴车辆平顺性计算平台的正确性和有效性。
但由于未独立考虑簧上质量、簧下质量的 6个自由度,未考虑减振器、板簧动态特性参数,未考虑一些减震衬套参数,计算的衰减存在峰值吻合,衰减误差较大问题,比如空、满载路面脉冲输入下驾驶员位置处车架垂向加速度等。
但本文的仿真方法和工具,对车辆的平顺性进行设计计算,在车辆设计初对平顺性能分析和评价,为设计人员进行改进和优化提供理论依据。这对于减小设计风险,缩短设计周期,降低研发成本有现实意义。
猜你喜欢
物流技术与应用(2022年5期)2022-06-17
机械设计与制造(2022年5期)2022-05-19
装备制造技术(2021年4期)2021-08-05
装备制造技术(2020年2期)2020-12-14
汽车零部件(2019年10期)2019-11-13
今日农业(2019年12期)2019-08-15
中国自行车(2018年4期)2018-05-26
汽车零部件(2014年5期)2014-11-11
空气动力学学报(2013年2期)2013-10-21
汽车与新动力(2012年5期)2012-03-25