
基于动态贝叶斯网络和模板匹配的空中目标意图识别 *
2023-05-30 10:17陈黎李芳芳邹长虹
现代防御技术 2023年2期
陈黎,李芳芳,邹长虹
(北京电子工程总体研究所,北京 100854)
0 引言
空中目标意图识别是防空作战态势评估的关键,是准确完成目标威胁评估、正确进行作战决策的重要基础[1-2]。但是,空中目标意图识别涉及众多影响因素,包括来袭目标的类型、携带的武器、惯用战术动作等,特别是为了掩盖其真实作战意图会释放电磁干扰或做出一些欺骗行动来诱使我方得到错误的识别结果,同时考虑到我方预警探测系统提供的信息具有一定程度的不确定性,因此,要实时完成对空中来袭目标的作战意图进行准确识别具有一定的难度。目前,该问题已成为防空作战态势估计领域的研究热点。
现有的空中目标意图识别方法大致分为基于规则推理的方法和基于数据驱动的机器学习方法2类。其中,基于规则推理的方法有贝叶斯网络[3-5]、证据推理[6-7]、模板匹配等方法[8-9]。贝叶斯网络方法是在概率论框架下提出的,能够有效实现定性知识与定量推理结合;证据推理方法能够表征比贝叶斯网络更弱的条件,具有较好的不确定性表达能力;模板匹配方法需要依据作战规则事先构建目标意图模板。基于数据驱动的机器学习方法有支持向量机、深度神经网络以及强化学习等方法[10-15],它们都需要大量的训练数据。
受限于目标运动航迹无法进行长时预测,现有基于规则推理的方法在进行意图预测时大都依据推理规则和实时感知的目标特征信息估计当前时刻的目标作战意图;而基于数据驱动的机器学习方法虽然能够利用预测模型和训练数据对目标意图进行预测,但预测准确率过度依赖训练数据的质量。基于此,本文提出一种基于动态贝叶斯网络和模板匹配的意图识别方法,将意图识别分为行动推理和意图预测2 个环节。在行动推理环节,不是根据目标运动航迹,而是根据目标当前的作战行动,预测目标可能的行动序列;在意图预测环节,进一步基于目标可能的行动序列,对目标的作战意图进行实时预测。意图预测过程充分利用了实时感知的目标特征信息、领域专家知识以及积累的历史作战态势数据,进一步提升了意图识别的准确率。
1 作战意图推理流程
假定来袭目标实现一个意图通常会逐一采取一系列相关作战行动的方式来实现。从意图的实现方来看,是一个自上而下的过程,即根据一定的条例和规则,从作战意图出发,将作战意图或者作战任务分解为行动序列,然后依次执行行动序列达到实现作战意图或者作战任务的目的[3]。
反过来,对意图的识别方而言,其分析推理思路是自下而上的。由于来袭目标作战意图或者作战任务的不可观测性,不能直接进行估计,同时还存在一定的隐蔽性和欺骗性,只能根据可感知的目标各特征状态,经过基于相应规则或逻辑的分析推理,得到来袭目标的作战意图或者作战任务。作战意图推理流程如图1 所示。

图1 作战意图推理流程Fig. 1 Reasoning process of combat intention
由图1 可知,意图识别方需要进行2 个环节的推理:一是由各目标特征信息推理预测得到目标可能的作战行动序列;二是由目标可能的作战行动序列推理识别得到目标的作战意图。完成这2 个过程的推理分析,就能够最终得出来袭目标的作战意图。
2 特征信息推理作战行动
构建如图2 所示的动态贝叶斯网络推理模型,综合利用领域专家知识和积累的历史作战态势数据,并根据实时感知的特征信息推理来袭目标当前的作战行动,根据目标当前的作战行动预测来袭目标可能的行动序列。

图2 动态贝叶斯网络推理模型Fig. 2 Reasoning model of dynamic Bayesian network
2.1 特征信息推理当前作战行动
step 1:建立贝叶斯网络结构。分析提取与目标作战意图相关的要素变量,依靠领域专家的知识来建立贝叶斯网络结构,如图3 所示。

图3 贝叶斯网络结构图Fig. 3 Structure of Bayesian network
这里主要通过目标的类型、距离、速度、航向、飞行高度等要素来推测目标的作战行动。
各节点要素的属性状态划分如下:
目标类型:固定翼飞机、武装直升机、无人机等;
距离:远、中、近;
速度:大、中、小;
航向:稳定、小幅变化、大幅变化;
惯用高度:超高、高、中、低、超低;
飞行高度:超高、高、中、低、超低;
制空程度:掌握程度大于80%,掌握程度约为50%,掌握程度小于20%;
作战行动:高空盘旋、高空巡航、中空巡航、中空机动、低空巡航、低空机动、俯冲、爬升。
step 2:对网络节点状态建立隶属度函数。从图3 中各变量节点属性状态划分来看,各节点属性状态的模糊划分构成模糊集,对各模糊集建立隶属度函数。
step 3:确定贝叶斯网络参数。参数学习方法是在已知网络结构的条件下,利用历史作战态势数据来学习节点的参数,包括边缘概率和条件概率。边缘概率表现为来袭目标先前的战术运用特点,条件概率表现为各要素之间的依赖关系。
这里采用E-M 算法估计节点的先验概率和条件概率,E-M 算法具体描述如下:
输入:G——贝叶斯网络NN的结构;D——一组关于N中变量的训练数据;δ——收敛阈值;
输出:θ——N的参数的估计。
过程:
t= 0,θt= 随机参数值
oldScore =L(θt|D)
while( true)
M 步:按下式计算θt+1:
newSore =L(θt+1|D)
i(fnewSore > oldScore +δ)
oldScore = newSore
t=t+ 1
else
returnθt+1
end while
step 4:在确定了贝叶斯网络模型的拓扑结构和相应参数的条件下,利用实时获取的目标特征信息推理空中目标的作战行动。
2.2 作战行动预测
构建如图4 所示基于马尔科夫链的作战行动预测模型θ=(A,B,π),式中:A为马尔科夫作战行动转移概率矩阵;B为单位矩阵;π为初始作战行动概率向量。

图4 基于马尔科夫链的作战行动预测Fig. 4 Combat operation prediction based on Markov chain
预测过程如下所述:
step 1:利用样本数据估计状态转移概率aij。采用极大似然估计法进行估计,即
step 2:基于当前作战行动进行n步预测。这里基于马尔科夫链模型θ进行预测,计算预测作战行动的条件概率,并剔除条件概率低于预置门限的作战行动。
step 3:计算n步预测作战行动的联合概率。采用马尔科夫链前向算法进行计算:
step 4:对n步预测作战行动的联合概率进行排序,取联合概率最大的l条n步作战行动,连同前m步已发生的作战行动构成l条m+n步作战行动序列。
3 作战行动推理作战意图
3.1 基于态势模板匹配的意图识别
目标作战意图或者作战任务主要包括侦察、通信、佯攻、防区外打击、临空攻击等,在获取目标m+n步作战行动序列后,进一步采用基于态势模板匹配的方法完成目标作战意图识别。基于态势模板匹配的意图识别方法如图5 所示。

图5 基于态势模板匹配的意图识别Fig. 5 Intention recognition based on situation template matching
主要包括3 个步骤:
step 1:基于C 语言集成产生式系统(C language integrated production system,CLIPS)CLIPS 方法构建态势模板知识库,根据作战规则、专家经验、作战条例、作战时段、敌方常用战法等因素建立作战行动与作战意图的IF-THEN 规则。
step 2:根据目标m+n步作战行动序列,综合态势模板知识库里的模板进行诊断,建立特定态势假设的模板结构。建立特定态势假设模板结构的过程与人的认知过程相对应,即从态势模板知识库里裁剪出适应于特定态势的模板结构。
step 3:计算m+n步作战行动序列与特定态势模板结构的匹配程度,当匹配程度高于预设门限时,这个特定态势模板结构就可以用来解释来袭目标的作战意图。
3.2 作战意图D-S 证据融合
对作战行动序列输出的作战意图进行D-S 证据融合,在利用Dempster 规则对证据融合时,如果证据冲突太大,融合结果会出现不合理的现象。这里对各证据的冲突程度进行量化度量,当证据冲突程度低于预设门限时,将融合后的目标意图作为目标的作战意图,证据融合流程如下所示。
step 1:根据证据可靠度对各证据进行折扣,折扣因子α根据该证据对应作战行动序列的联合概率进行计算:
step 2:对作战行动序列输出的作战意图进行D-S 证据融合:
式中:
step 3:计算证据间的平均证据距离:
式中:
step 4:如果满足下述条件,则融合后的作战意图即为来袭目标的作战意图:
式 中:m(X1) = max {m(Xi)} ;m(X2) = max {m(Xi)且Xi≠X1};ε1和ε2为预设门限。
4 仿真校验
下面在要地防空作战场景下固定翼飞机执行临空攻击作战任务,基于表1 所示历史态势数据,并采用本文所提基于动态贝叶斯网络和模板匹配的空中目标意图识别方法对来袭目标的作战意图进行识别。
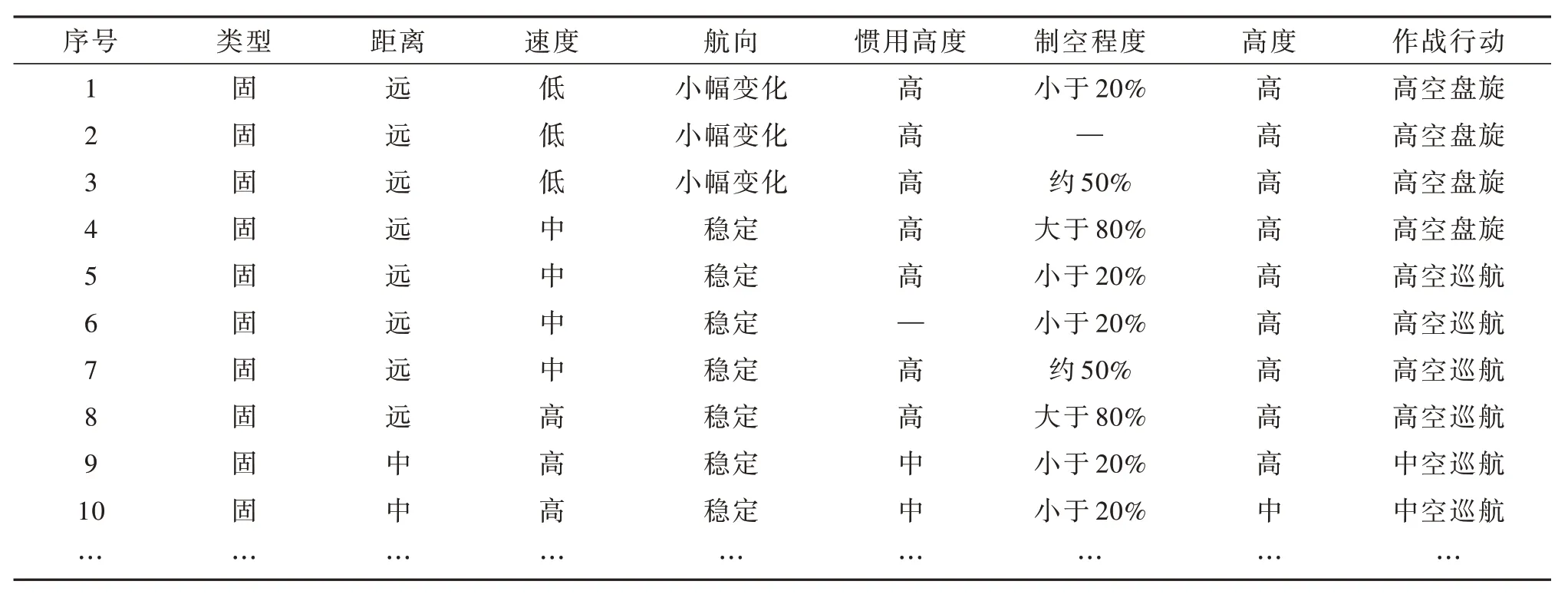
表1 历史态势数据Table 1 Historical situation data
飞行高度隶属度函数、飞行速度隶属度函数、距离隶属度函数以及航向隶属度函数分别见表2~5。

表2 飞行高度隶属度函数Table 2 Flight height membership function

表3 飞行速度隶属度函数Table 3 Flight velocity membership function

表4 距离隶属度函数Table 4 Distance membership function

表5 航向隶属度函数Table 5 Heading membership function
对表1 所示历史态势数据采用E-M 算法进行迭代估计网络节点的先验概率和条件概率,得到如图6 所示的贝叶斯网络推理模型。

图6 贝叶斯网络推理模型Fig. 6 Reasoning model of Bayesian network
当目标类型为固定翼飞机、距离为远、速度为高、惯用高度为高、制空程度为小于20%、飞行高度为高的证据出现后,推理模型给出当前作战行动为“高空巡航”,如图7 所示。

图7 特征信息推理当前作战行动Fig. 7 Reasoning of current combat operations by feature information
进一步利用基于马尔科夫链的作战行动预测模 型θ=(A,B,π) 对 目 标 可 能 的 行 动 序 列 进 行预测。
step 1:利用样本数据构建作战行动预测模型如下:
step 2: 基于当前作战行动进行3 步预测:
第1 步预测:
取预测概率门限为ξ1= 0.2,则第1 步预测可能的 作 战 行 动 为:“俯 冲”(0.304),“低 空 巡 航”(0.201)。
第2 步预测:
取预测概率门限为ξ2= 0.15,则第2 步预测可能的作战行动为:“低空巡航”(0.312),“中空巡航”(0.154),“低空机动”(0.151)。
第3 步预测:
取预测概率门限为ξ3= 0.15,则第3 步预测可能 的 作 战 行 动 为:“低 空 巡 航”(0.284),“爬 升”(0.204),“中空巡航”(0.192)。
step 3: 计算3步预测作战行动序列的联合概率。
step 4: 对3 步预测作战行动的联合概率进行排序,取联合概率最大的5 条3 步作战行动,连同前1步已发生的作战行动(高空巡航)构成5 条4 步作战行动序列,见表6 所示。

表6 联合概率最大的5 条作战行动序列Table 6 Five combat operation sequences with maximum joint probability
采用Rete 匹配器对5 条4 步作战行动序列进行规则匹配,匹配结果如表7 所示。
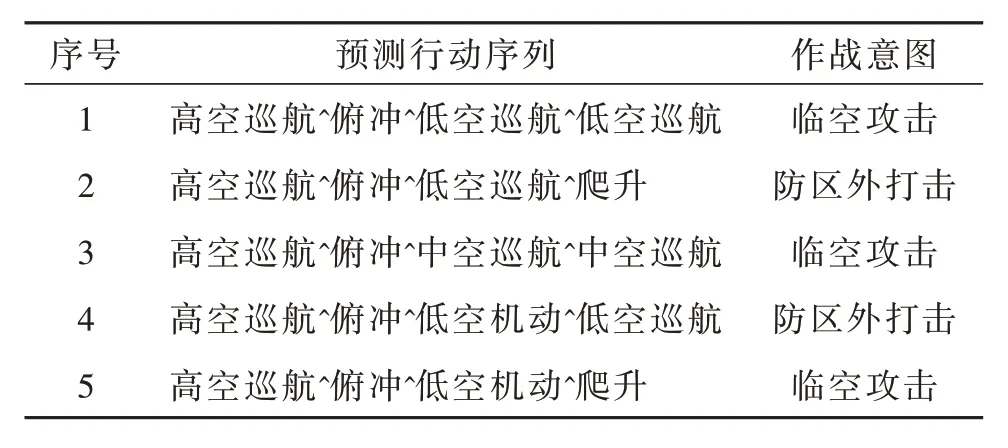
表7 预测行动序列匹配作战意图Table 7 Predicted operation sequence matching combat intention
对作战行动序列输出的作战意图进行D-S 证据融合,首先根据联合概率对各证据进行折扣:
m(1临空攻击)=1,m(1H)=0;
m(2防区外打击)=1,m(2H)=0;
m(3临空攻击)=0.422,m(3H)=0.578;
m(4防区外打击)=0.625,m(4H)=0.375;
m(5临空攻击)=0.375,m(5H)=0.625.
进一步对各证据进行D-S 证据融合:
m(临空攻击)=0.509 2,
m(防区外打击)=0.490 6,
m(H)=0.000 2.
表明此时证据冲突较大,无法得到来袭目标的作战意图。
当目标类型为固定翼飞机、距离为中、速度为高、航向大幅变化、制空程度为小于20%、飞行高度为中的证据出现后,预测行动序列匹配的作战意图如表8 所示。

表8 预测行动序列匹配作战意图Table 8 Predicted operation sequence matching combat intention
对各证据进行D-S 证据融合:
m(临空攻击)=0.880 6,
m(防区外打击)=0.119 3,
m(H)=0.000 1.
此时证据间的平均证据距离dˉ= 0.395 <ε2=0.6,同 时m(临空攻击)-m(防区外打击) >ε1=0.5,表明证据冲突不大,故将融合识别结果“临空攻击”作为来袭目标的作战意图。
进一步采用本文所提方法在不同场景下对来袭目标的作战意图进行识别, 识别准确率如表9所示。
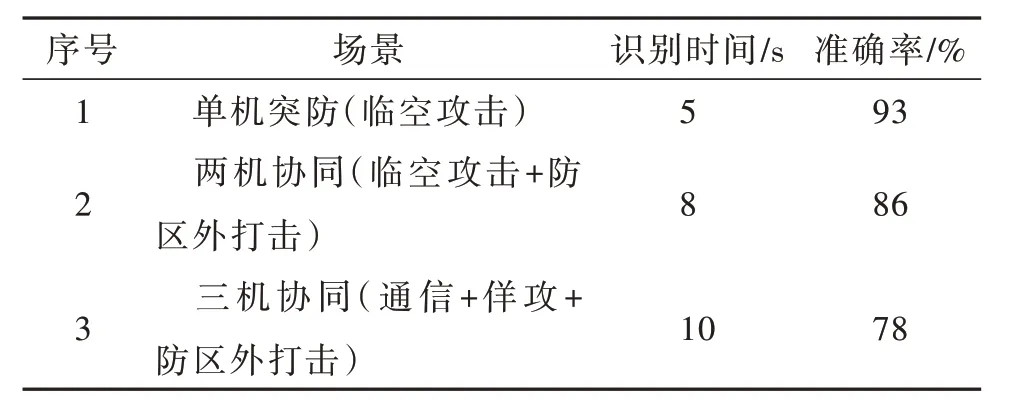
表9 不同场景下的识别准确率Table 9 Recognition accuracy in different scenarios
从上述仿真过程可以看出,该方法由于充分利用了积累的历史作战态势数据、实时感知的目标运动、属性等特征信息以及领域专家知识建立的行动预测模型对目标行动序列进行预测,因此能够较早地准确识别出目标作战意图。这不仅提高了意图识别的准确率,而且还能够进一步缩短态势评估的时间,为防空作战赢得先机。同时,本文所提识别方法的准确率依赖于历史作战态势数据的可信度,因此有必要对历史作战数据进行分析和整理,特别是需要对平时和战时的作战数据进行区分,进一步提升意图识别方法的准确率。
5 结束语
为了解决意图识别中的意图预测问题,本文提出了一种基于动态贝叶斯网络和模板匹配的意图识别方法。该方法将意图识别分为行动推理和意图预测2 个环节,在行动推理环节不是根据目标运动航迹而是根据目标当前的作战行动预测目标可能的行动序列,在意图预测环节进一步基于目标可能的行动序列对目标的作战意图进行实时预测。仿真结果表明,意图识别过程充分利用了实时感知的目标特征信息、领域专家知识以及积累的历史作战态势数据,能够进一步提升意图识别的准确率。
猜你喜欢
法律方法(2022年2期)2022-10-20
福建基础教育研究(2022年4期)2022-05-16
法律方法(2021年3期)2021-03-16
汽车与安全(2020年1期)2020-05-14
中国外汇(2019年19期)2019-11-26
中国化肥信息(2019年5期)2019-06-25
数理化解题研究(2017年4期)2017-05-04
铁道通信信号(2016年6期)2016-06-01
电子器件(2015年5期)2015-12-29
中国卫生(2015年2期)2015-11-12
