地铁隧道智能巡检机器人
2023-06-07 05:47陆京龙李德魁胡亮刘旭张舒晴李猛
电子制作 2023年9期
陆京龙,李德魁,胡亮,刘旭,张舒晴,李猛
(天津职业技术师范大学,天津,300222)
0 引言
随着社会经济的发展和城市化进程的加快,使得城市人口数量迅速增长,地面交通难以满足发展的需求,因此发展轨道交通已成为各大城市的第一选择。相比较公共汽车的运输能力来看,地铁的运输能力可以说是公交的几倍之多,而且在速度上也是公交以及私家车所无可比拟的。正是因为这样的大运输能力,所以其安全性就显得尤为重要。由于人流量巨大,而安全出入口少,且地铁隧道以及车站通常是位于地下,一旦出现任何问题,人员的疏散和逃生都极为困难,必然造成巨大的生命财产损失和社会影响。
如何保护正在运行中的隧道,掌握其环境状况,已成为一个越来越现实的问题。由于区间隧道较长,工程规模较大、情况复杂,且工程的隐蔽性较强,采用传统的人工检测方法需要大量人力与时间,且检查结果主观性较大,检测灵敏度低,只能识别较为严重的损伤,而且检查周期较长,会对地铁隧道的运营造成较大的影响。为了确保地铁工程结构长期服役的安全性和耐久性,有必要研究、开发和应用地铁隧道智能巡检机器人、实时监测其服役期间的安全状况以便避免重大事故的发生。同时,通过检测地铁隧道中的早期问题,能大大节约工程的维修费用,避免出现频繁大修关闭地铁交通所引起的无可挽回的损失。
1 系统总体设计
地铁隧道智能巡检机器人工作时,首先辅助控制器(STM32)通过传感器对环境参数进行采集。对采集到的数据进行滤波,然后将数据进行分析,判断是否在合适的区间内。与此同时主控制器(NLEAI800)通过摄像头拍摄图像进行降噪等预处理后进行分析,判断隧道中是否存在异常。以上两者若任一不符合标准,主控制器则会将此时机器人所在的相对位置以及参数和图像保存后通过联网模块上传至云端。工作人员可在云端查看隧道内存在的异常情况以及异常位置,方便直接前往异常点进行相关工作。其模型图如图1 所示。
系统整体设计分为四部分:机器人设计、手机客户端设计、上位机设计、网页端设计。其系统总体设计框图如图2所示。

图2 系统总体设计框图
2 系统硬件设计
本文设计的地铁隧道智能巡检机器人的硬件系统主要包括视觉检测系统的设计;传感器检测系统的设计;机械结构的设计;其硬件设计框图如图3 所示。

图3 硬件设计框图
通过系统硬件框图可以看出,地铁隧道智能巡检机器人的硬件系统以新大陆AI 边缘计算NLE-AI800 开发板为主控,通过STM32 外围配置电机、传感器、舵机模块等,从而实现机器人的自动检测地铁隧道环境、图像信息采集与分析、自身定位、数据上传与可视化等多种功能。系统硬件连接图如图4所示。

图4 系统硬件连接图
■2.1 视觉检测
机器人上搭载两个摄像头,前置摄像头用于实时显示机器人前方图像,供工作人员观察隧道环境,该摄像头采用网络摄像头,NLE-AI800 连接网络即可直接拉取实时视频流,并可搭载一些神经网络模型配合工作;下置摄像头用于俯视地铁轨道,以检测轨道上是否存在损伤,该摄像头采用海思hi3516 集成版,无需另外的图像处理设备即可分析出轨道是否存在损伤,发现损伤后通过串口将信息传输给STM32。
2.1.1 NLE-AI800
新大陆AI 边缘计算NLE-AI800 开发板是一款具备高可扩展性的AIOT 开发平台,平台具有AI 计算能力,提供4TFLOPS 的算力,支持多sensor 输入,集成丰富的硬件接口,包括:双千兆网口(一路POE 受电)、RS232/RS485、蓝牙/ WiFi、4G、PCIE、扩展GPIO 等接口,内置各类深度学习算法,包括:分类检测、车辆/车牌识别、人脸识别、人脸属性分析等。亦可接入NLE Cloud 新大陆物联网云平台,以“云、管、边、端”全栈式服务推进“万物智联”的时代。
2.1.2 摄像头模块
摄像头模块采用网络摄像头开发,支持无线WiFi 连接,4mm 广角镜头,onvif 网络协议,支持电脑、手机远程监控,通过rtsp 协议拉取视频流。
■2.2 传感器检测
机器人上搭载多个不同传感器,STM32 采集传感器数据后进行10 次均值滤波后,将数据实时显示在上位机画面,当某个传感器值异常时,会将数据背景色变为红色以提示。
2.2.1 控制器
STM32F407VET6 最小系统,拥有512KB 内置flash,以及192+4KB 的运行内存,足以满足大部分需求。但是实际运用中有128KB 可以使用,并且这里保存着运行过程中系统所占用的空间,所以实际可用空间低于128KB。主频通过PLL 倍频后能够达到168MHz,而且芯片内置一个16MHz 的晶振和一个32kHz 的晶振,可以满足不同功耗的需求。
2.2.2 温湿度传感器
DHT11 数字温湿度传感器是一款含有已经校准数字信号输出的温度湿度复合传感器。它应用专用的数字模块采集技术和温湿度传感器技术,确保产品具有可靠性与卓越的长期稳定性,成本低、相对湿度和温度测量、响应快、抗干扰能力强、信号传输距离远、数字信号输出、精确校准。
2.2.3 气体传感器
MQ-2 气体传感器所使用的气敏材料是在清洁空气中电导率比较低的二氧化锡(SnO2)。当传感器所处环境中存在可燃气体时,传感器的电导率会随空气中可燃气体浓度的增加而增大。使用简单的电路即可将电导率的变化转换为与该气体浓度相对应的输出信号。
■2.3 机械结构
机械结构分为动力装置、左侧夹紧装置、右侧调节装置、左侧开合装置;经这五部分组合,使得机器人在轨道上可以稳定运行,其设备总装模型如图5 所示。

图5 设备总装模型图
2.3.1 动力装置
由直流减速电机通过同步带带动主轮旋转提供前进动力,通过自由轮提供一定的平衡性。其模型图如图6 所示。

图6 动力装置模型图
2.3.2 左侧夹紧装置
由弹簧提供一定的张力,迫使小自由轮可紧贴轨道侧面,为机器人进一步提供平衡性。其模型图如图7 所示。
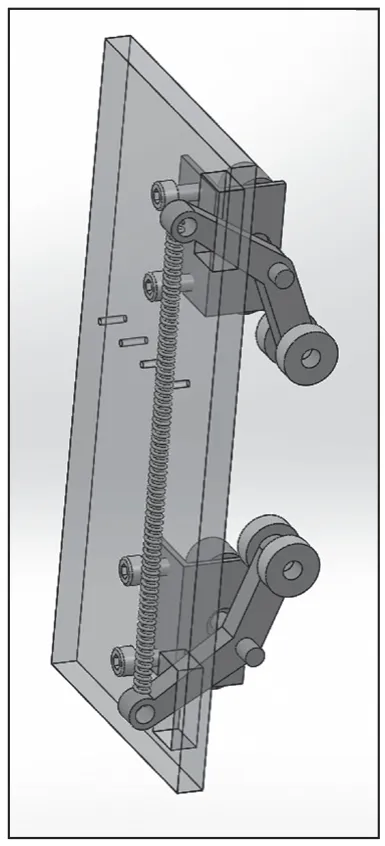
图7 左侧夹紧装置模型图
2.3.3 右侧调节装置
由舵机通过齿轮来调节小自由轮与轨道侧面的距离,配合左侧夹紧装置使整体对铁轨两侧发力均匀,使得动力装置能在轨道上方居中运动,不偏离轨道中心。其模型图如图8所示。
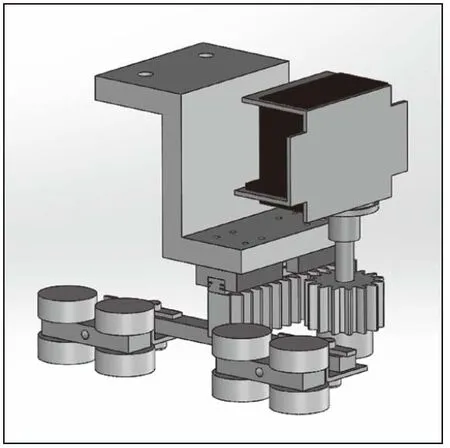
图8 右侧调节装置模型图
2.3.4 左侧开合装置
由舵机通过传动杆来调节左侧夹紧装置,方便工作人员将机器人放置在轨道上或是从轨道上取下。其模型图如图9所示。
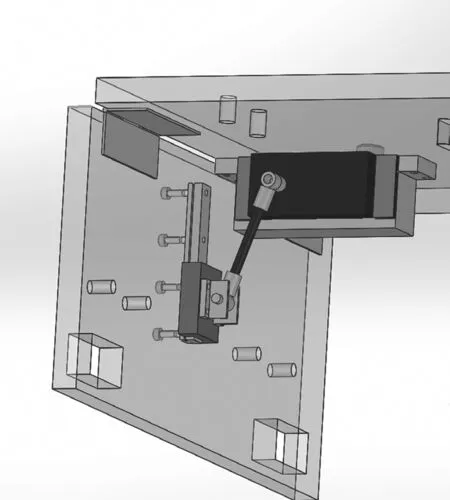
图9 左侧开合装置模型图
3 系统软件设计
地铁隧道智能巡检机器人的软件设计是在硬件系统的基础上通过软件程序的设计,实现机器人的自主运动、传感器数据采集、图像信息采集与分析以及数据上传云端等功能。系统软件的设计包括地铁隧道智能巡检机器人控制系统程序设计、手机客户端设计及网页端页面设计三部分内容,实现机器人的自动工作与数据的可视化。
■3.1 机器人控制系统程序
机器人控制系统程序针对STM32 处理器进行设计,通过MDK5 采用C 语言进行程序编写,主要包括传感器数据采集、编码器计数、电机与舵机控制、数据上传等程序设计。
■3.2 手机客户端
手机客户端设计针对APP 用户访问历史数据、异常点信息等进行设计,主要通过JAVA 语言进行开发。其界面如图10 所示。

图10 手机客户端APP 界面
■3.3 网页端
网页端设计针对故障点信息查看、用户管理、数据库进行设计,数据库设计使用了MySQL 数据库,专门对机器人信息,用户信息,异常信息的保存,后台数据处理设计。其页面如图11 所示。

图11 网页端界面
4 结束语
本文提出一种地铁隧道智能巡检机器人,利用图像识别技术、传感器技术以及物联网技术,更加高效准确地对地铁隧道中的各项参数进行检测。机器人全自动运行,发现问题上传云端,节省人力资源;铁路工人通过云端页面可以查看设备上传的具体数据,包括异常类型以及异常点所在位置,从而直接前往异常点进行检修。实现机电一体化,并采用物联网技术使检测设备,铁路工人互联互通,实现信息的无线传输。
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
汽车工程师(2021年12期)2022-01-18
中国外汇(2019年6期)2019-07-13
小读者(2019年24期)2019-01-10
电子测试(2018年13期)2018-09-26
小天使·四年级语数英综合(2016年11期)2016-11-29
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
中国交通信息化(2015年7期)2015-06-06