一种灯塔平台可见光岸海远距离通信系统设计与实现
2023-06-07 05:47刘婷婷马向阳董洁陈萍
电子制作 2023年9期
刘婷婷,马向阳,董洁,陈萍
(中国船舶集团系统工程研究院,北京,100094)
0 引言
目前,我国海洋应急通信能力不足,需要应急补网与能力增强。我国目前的海洋通信基础设施薄弱,海上近岸通信主要依靠临海移动通信网络、短波/超短波电台网络。近年来,随着南海开发的迅速推进,一些条件较好的岛屿完善了公众移动通信网络,然而仅限于岛屿及周边较近的海上区域。在中国近海范围中,各灯塔平台主要作用包括护航照明、指导地理坐标、军事防御和宣示主权,并且各海域上各灯塔平台之间相距较远,分布较为零散,难以成体系或者规模在海上应急通信领域进行使用,无法满足海上安全风险事件防控和应急处置的需求。
本文设计了一种基于灯塔平台可见光岸海远距离通信系统,传统LED 可见光通信发散角度大,易于对准,并且输出功率可以很高,达到W 级别,能够达到远距离的通信要求。且LED 体积小、易于安装、价格低、受温度影响小,人眼安全[1]。因此,在已有成熟的LED 可见光通信的基础之上,研究一种远距离LED 可见光通信系统尤为重要。本文从LED 可见光通信系统总体设计、硬件、调制解调和软件设计研制分析,并生产配套样机进行岸海远距离拉距试验验证。一方面通过原理样机的研制,验证了以较大的波束发射角和接收视场角进行远距离通信实际能力,另一方面,验证了在无线电信号受到干扰、设备故障、船舶遇险等紧急情况下,灯光通信可提供半径15km 区域范围内安全、有效的最低限度通信手段,提高海上安全风险事件防控和应急处置能力。
1 系统整体设计
本系统为全双工通信系统,为更好的表述,仅以单向通信为例进行描述。系统各组成部分简述如下:
控制处理模块:为本系统控制核心部件,主要采用单片机STM32F407 和蓝牙模块、DDS 芯片、FPGA 组成。
发射部分:包含数模变换器(DAC)、驱动电路、LED阵列和透镜,DAC 负责将数字信号转换成模拟电波形,驱动电路负责驱动LED,完成电光转换,透镜控制光束角度,提供天线增益。
接收模块:包括汇聚透镜、滤光片、光电变换器件、前置放大器和模数变换器(ADC)。负责光路处理、光电变换和光电流的放大处理[2]。
2 系统硬件模块设计
本系统硬件模块:控制处理模块、光发射模块、光接收模块、电源模块、调制解调和滤波器。
■2.1 控制处理模块
控制处理模块包括光发送和光接收两个方向的控制处理功能[3]。

图1 系统结构框图
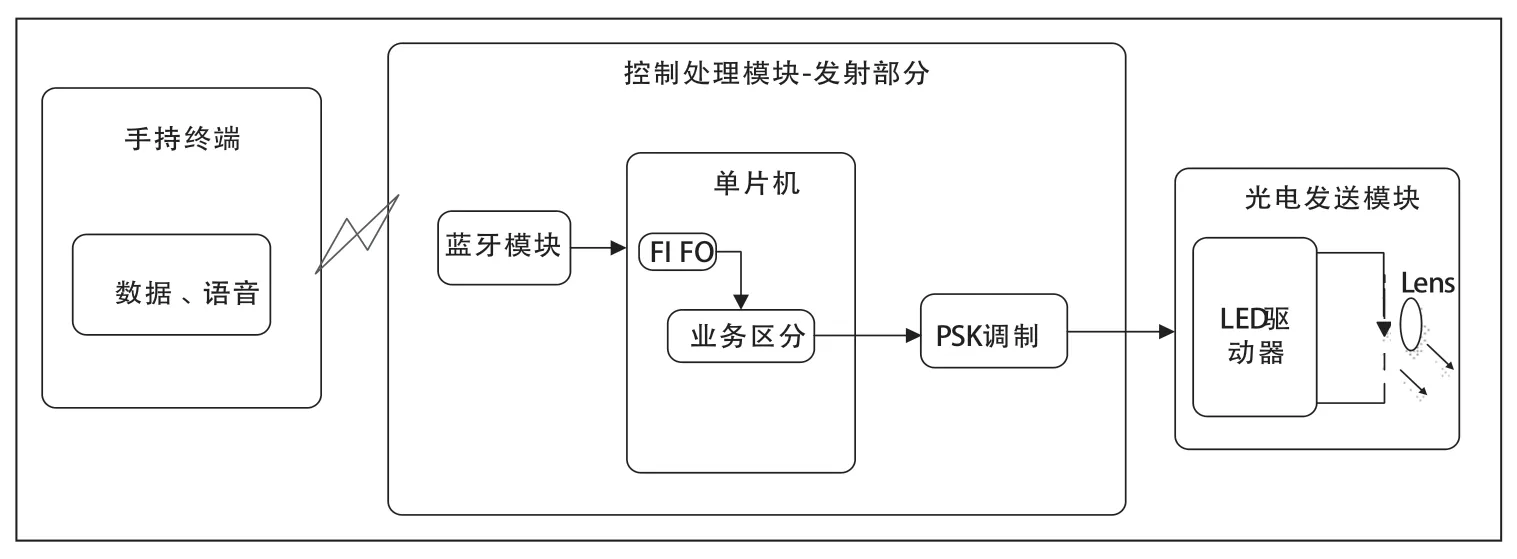
图2 控制处理模块-发送方向
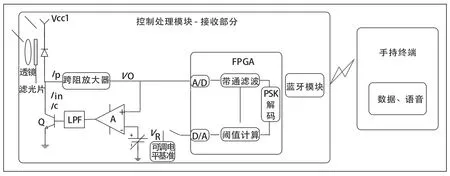
图3 控制处理模块-接收方向
光发送方向主要功能包括:手持终端通过蓝牙接入控制处理模块,完成用户数据接入,通过DPSK 调制,对用户数据进行DPSK 调制。
光接收方向主要功能包括:对跨阻放大器的输出电压信号进行AD 采样[4],并送到单片机内部,完成对DPSK 信号进行解调,解码后用户数据送给手持终端。
光发送:手持终端通过蓝牙信息传输下行进入FIFO,进行DPSK 调制(首先进行差分编码,然后使用DDS 电路生成250kHz 调制载波[5],将需要发送出去的信号调制成2DPSK 信号,加载到载波上,再经过放大和控制电路通过智能灯组发送出去。
光接收:对来自光电接收模块的信号首先进行A/D 转换,进行混频以降低载频,然后进行带通滤波以降低电域噪声,再进行DPSK 解调,最终送给手持终端[6]。
■2.2 光发送模块
光电发送模块的主要功能是电光变换、光束成型。
手持终端发送的数据蓝牙接口发送到控制处理模块,首先进入DSP,在DSP 中进行链路层和物理层处理,进行纠错编码,然后使用DDS 实现2DPSK 调制,将数字格式的已调信号送给DAC,然后变成连续的物理波形,这个电信号通过驱动电路转变成电流信号驱动LED 阵列,发出光信号,光信号经过汇聚透镜控制发射光束的角度[7]。
如图4 所示,来自核心板的已调制信号输入到LED 驱动器,LED 驱动器驱动LED 阵列发光。光通信设备中共36个LED,每6 个LED 串联成一串,每2 串并联到一起,使用一个驱动电路,整个阵列共有3 个驱动电路; LED 上安装一个光学透镜,该透镜将LED 的光束角压缩到8±2°[8]。该模块为输入信号安排了测试点,可对输入信号特性进行测量,光学特性在模块外部使用光学仪表进行测量。
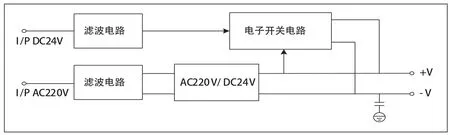
图6 电源单元原理框图
■2.3 光接收模块
光电接收模块的主要功能是光学汇聚、光学滤波、光电变换、跨阻放大。
由接收镜头将光聚焦后,经过光学滤波片滤除带外背景光噪声之后,通过APD 的光电转换将光信号转换成电流信号,电流信号经过跨阻放大器的放大后变为电压信号,电压信号送入A/D 转换电路,将电压数字化,数字化后的信号经过FPGA的滤波,解调出信息数据送到主控制模块[9]。
在光电接收模块处,光信号首先被汇聚透镜汇聚,然后
经一片20nm 的带通滤光片滤波后,进入到APD(雪崩光电二极管)。APD 将光信号转变为电流信号,再经跨阻放大器放大为电压信号。跨阻放大器具有自动增益控制功能,可适应信道衰减的大幅度变化[10]。上图中的运算放大器A、低通滤波器LPF 和三极管Q 构成直流抵消电路,该电路旁路掉光电流中的直流分量,可避免跨阻放大器饱和。
■2.4 电源模块
电源模块的主要功能是为设备提供交直流两种供电方式,输入电源电压即可采用AC220V 供电,也可采用DC24V(悬浮)供电两种电源互为备份,交直流供电能自动无缝隙切换,交流供电优先。交流220V 50Hz 电源,通过电源滤波器滤波和整流模块,然后经变压器、整流和滤波电路器将DC370V 变换成DC24V 输出。直流输入电源电压DC24V 经滤波电路变换成DC24V 输出。
■2.5 调制解调/滤波器设计
2.5.1 调制解调方案
本系统采用2PSK 调制方案进行设计。
(1)2PSK 调制的实现
在二进制数字调制之中,当正弦载波的相位随着二进制数字基带信号离散变化时,产生二进制移相键控(2PSK)信号。通常用已调信号载波的0°和180°分别表示二进制数字基带信号的1 和0。2PSK 是用二进制数字信号控制在获得两个通常相隔π 弧度的相位,例如用相位0 和π 分别表示二进制中的1 和0。
在发送端采用了DDS 的方法实现2PSK 的调制。对于常见的DDS 芯片,如AD9852,需要在频率控制字(FTW)中写入载波频率,并在两个相位调整寄存器(Phase Adjust Register)中写入相位控制字,再将数据源接到输入管脚。当准备就绪后,激活I/O update clock 管脚,系统就能开始工作,实现2PSK 调制。芯片在2PSK 模式下时序如图7所示。

图7 DDS 芯片在2PSK 模式下时序
(2)2PSK 解调的实现
2PSK 信号通常采用带通匹配滤波器或相关解调器进行解调,并进行最佳检测。考虑到使用带通匹配滤波器进行解调时,判决点需要较精确的在波形开始后的Tb 时刻,判决点采样时刻的细微偏差会对判决结果造成较大的误差,所以在此采用相关解调。具体的解调原理如图8 所示。
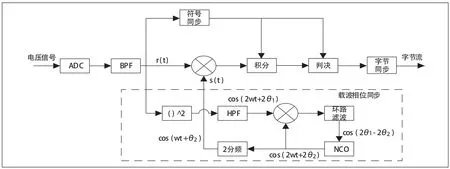
图8 2PSK 解调方案
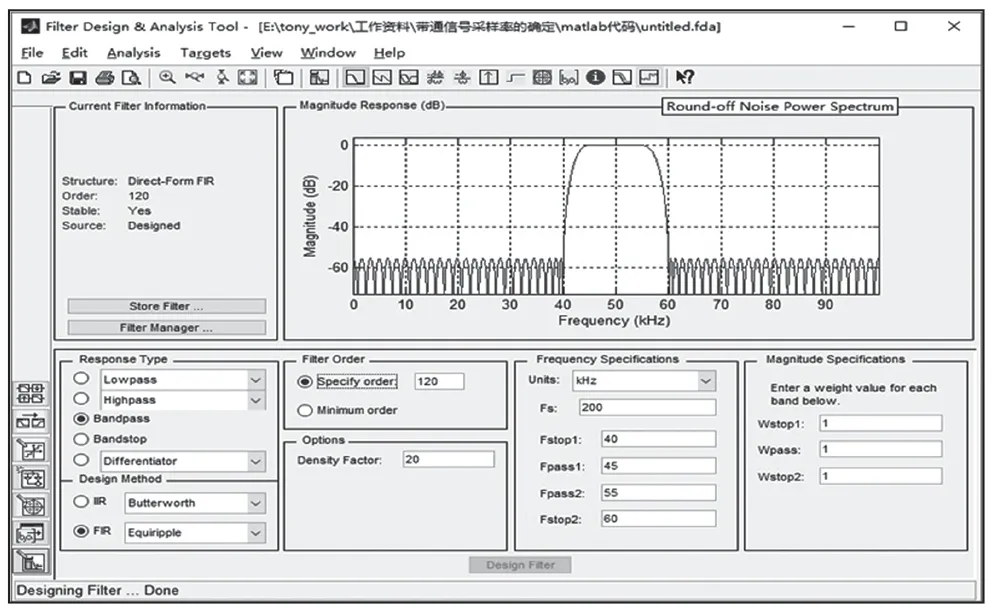
图9 等波纹滤波器设计方案
在接收端采用了数字解调的方法。光信号在进入接收端时,先经过光电探测器,实现了光电变换变为了电流信号,然后光电流经过前置放大器由电流信号放大并变为电压信号,对此电压信号进行采样,完成了模拟信号向数字信号的转换。在对采样信号进行带通滤波之后,得到的数据将在接收端的单片机中进行解调[11]。
2.5.2 滤波器设计
滤波器设计考虑的相关问题如表1 所示。

表1 滤波器设计考虑相关问题
经过大量仿真实验验证,本系统选择等波纹Equirripple 滤波器设计方案,其特点是:在相同情况下最大逼近误差最小,即通带最大衰减最小,阻带最小衰减最大;波纹比较稳定;设计容易实现;通带比较宽;旁瓣变化比较陡。主要设计参数:阶数120,Ast=60dB。
3 软件设计
本系统可见光通信设备的通信采取手持终端(三防手机)的形式,以APP 方式实现,并可实现双向语音通信[12]。其APP 软件总体按功能划分可分为以下几个模块:照明、通信业务、参数设置。
其系统软件工作流程图如图10 所示。
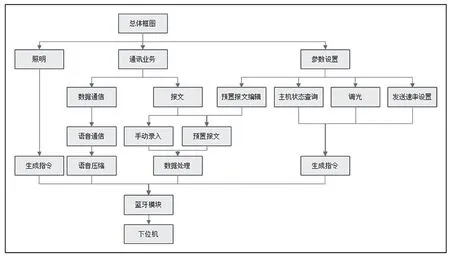
图10 软件总体工作流程图
4 平台的测试与分析
本系统对灯塔远距离可见光通信平台进行了测试和评估,包括莫尔斯报文传输功能、传输速率以及远距离通信距离功能测试。可见光通信平台分为灯塔端平台和船载端两部分,灯塔端灯光通信设备固定在灯塔平台上,船载端灯光设备固定在船载上,两端分别接收和发送可见光进行通信测试,光源类型为红光LED,波长860nm,光功率216W。测试场景如图11 所示。

图11 可见光通信测试场景图
试验连接示意图如图12 所示。
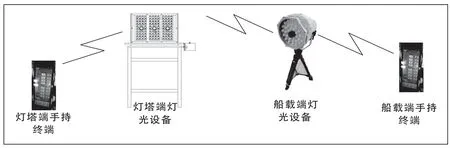
图12 可见光(红外光)通信试验连接示意图
(1)莫尔斯报文传输功能测试
可见光通信平台按图12 进行连接后,灯塔端灯光通信设备和船载端灯光设备互发报文完成对准后,灯塔端灯光设备向船载端通信设备发送莫尔斯报文“thank you”,接收端手持终端可以正确接收并显示“thank you”;按相反流程,船载端灯光设备向灯塔端通信设备发送莫尔斯报文,接收端手持终端正确接收并显示“thank you”,即可完成传输功能测试验证。
(2)通信传输速率测试
可见光通信平台按图12 进行连接后,灯塔端灯光通信设备和船载端灯光设备互发报文完成对准后,灯塔端灯光设备向船载端通信设备发送不少于10000 个数字报文,接收端手持终端可以正确接收并显示;按相反流程,船载端灯光设备向灯塔端通信设备发送不少于10000 个数字报文,接收端手持终端正确接收并显示,两端根据报文数据量和时间计算通信速率,即可完成传输速率测试验证。
(3)远距离通信距离测试
可见光通信平台按图13 进行连接后,当船载端行驶至7.5km 处时,灯塔端灯光通信设备和船载端灯光设备互发报文完成对准后,灯塔端灯光设备向船载端通信设备发送一组数据报文,船载端手持终端可以正确接收并显示,记录接收数据报文的流畅性和准确性,重复3 次报文收发;按相反流程,船载端灯光设备向灯塔端通信设备发送一组数据报文,灯塔端手持终端可以正确接收并显示,记录接收数据报文的流畅性和准确性,重复3 次报文收发。当船载端行驶至15km 时,重复上述过程进行验证。
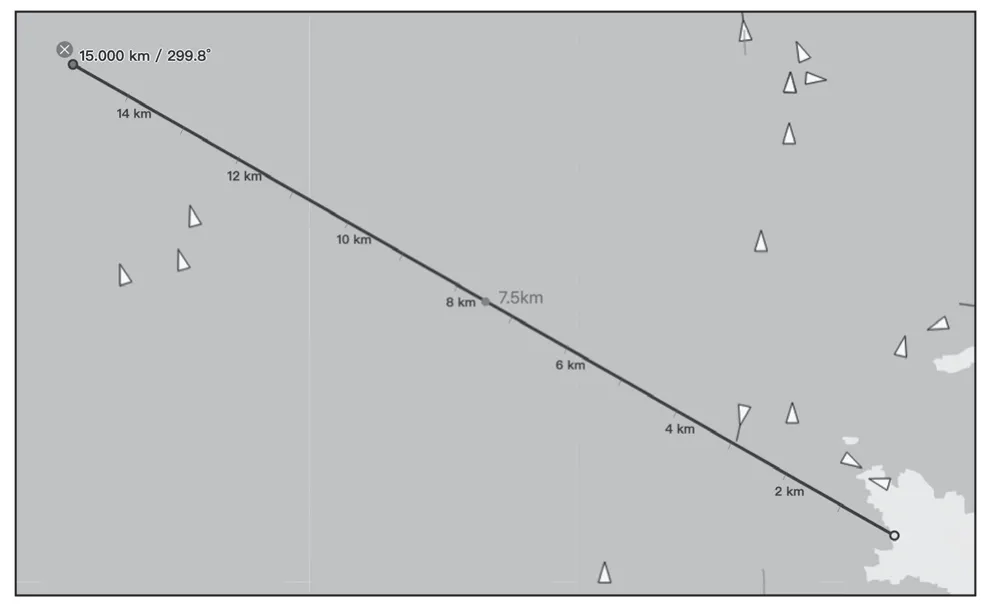
图13 船载端行驶轨迹图
5 平台性能测试与分析
我们在红光LED、波长频率860nm、光功率216W、接收端灵敏度小于-57dBm 的固定条件,大气透射率0.8T、背景光强度200cd/m2(随天气变化)的测试条件下,对可见光通信平台进行了莫尔斯报文传输功能、传输速率以及远距离通信距离功能测试,通过灯塔端和船载端灯光设备手持终端对接收到的数据进行记录,测试结果如表2 所示。

表2 功能测试记录
测试结果表明,在进行莫尔斯码业务报文测试时,当灯塔端发送莫尔斯码时,船载端建链正常,接收莫尔斯码正常;当船载端发送莫尔斯码时,灯塔端建链正常,接收莫尔斯码正常。在进行传输速率测试时,灯塔端发送数据传输速率5.5kbps,船载端发送数据传输速率5.32kbps;在进行通信距离测试时,灯塔端与船载端分别相距7.5km和15km时,建链正常,通信情况良好,可实现无误码数据传输。因此,本文系统设计方法可以满足岸海远距离通信,实际通信范围可覆盖15 公里,语音和数据通信正常,在接收端经过滤波器后的信号波形检测相对稳定,因此本系统设计合理,具有实际使用价值。
6 结束语
本文介绍了一种基于灯塔平台可见光岸海远距离系统设计、实现与验证,结合岸海LED 可见光通信系统的特点,重点介绍了LED 可见光远距离通信系统样机设计方案,结果表明:本系统提供了近岸常态应急保障手段,搭建了在既有灯塔站点上配置响应的体系架构,实现灯塔站点周围附近海域的常态化应急通信保障。在我国近岸、岛礁周边发生灾害和突发事件时,通过在东海沿岸、岛礁、以及重点海区布设的灯塔平台上部署灯塔应急通信系统,利用平台支持能力强、网络节点地理位置相对固定的特点,实现近岸海域/岛礁周边15 公里左右范围内海域的全天时、全天候多功能应急通信接入流程,可支持海上用户SOS 呼救,能够满足海上应急通信保障的具体需求,并灵活机动地调整服务区域范围,对国内可见光通信系统设计提供重要参考意义。
猜你喜欢
作文小学高年级(2022年4期)2022-05-27
汽车实用技术(2022年5期)2022-04-02
石家庄铁路职业技术学院学报(2021年1期)2021-06-09
新能源科技(2021年6期)2021-04-02
科学技术创新(2021年7期)2021-03-23
艺术品鉴(2020年7期)2020-09-11
金桥(2020年12期)2020-04-13
文苑(2019年24期)2020-01-06
中国交通信息化(2018年12期)2018-03-21
作文周刊·小学二年级版(2016年45期)2017-07-18